文章目录
上一篇文章:(一)uboot基础了解 下一篇文章:(三)Uboot驱动模型
同大多数的Bootloader一样,uboot的启动过程也分为BL1、BL2两个阶段,分别对应着SPL和Uboot。
SPL(BL1阶段):负责开发板的基础配置和设备初始化,并且搬运Uboot到内存中,由汇编代码和少量的C语言实现
Uboot(BL2阶段):主要负责初始化外部设备,引导Kernel启动,由纯C语言实现。
我们这篇文章,主要介绍Uboot(BL2阶段)的启动流程,BL1阶段启动流程的详细分析,可以见我的后续文章。想要深入了解的,可以好好研究下!

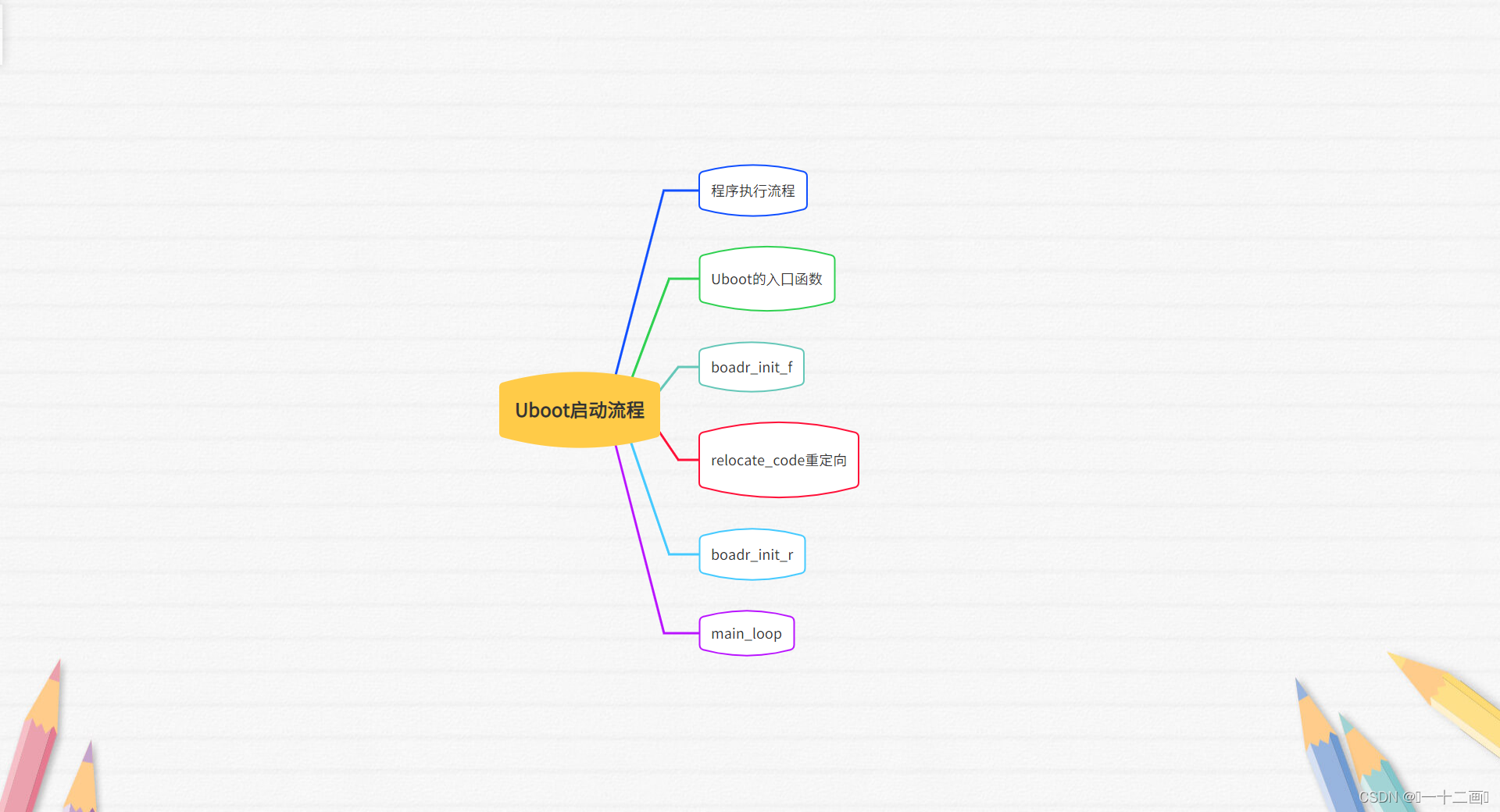
2.1、程序执行流程图
我们先总体来看一下Uboot的执行步骤,这里以EMMC作为启动介质,进行分析!
无论是哪种启动介质,基本流程都相似,我们这就往下看!
打开图片,结合文档、图片、代码进行理解!
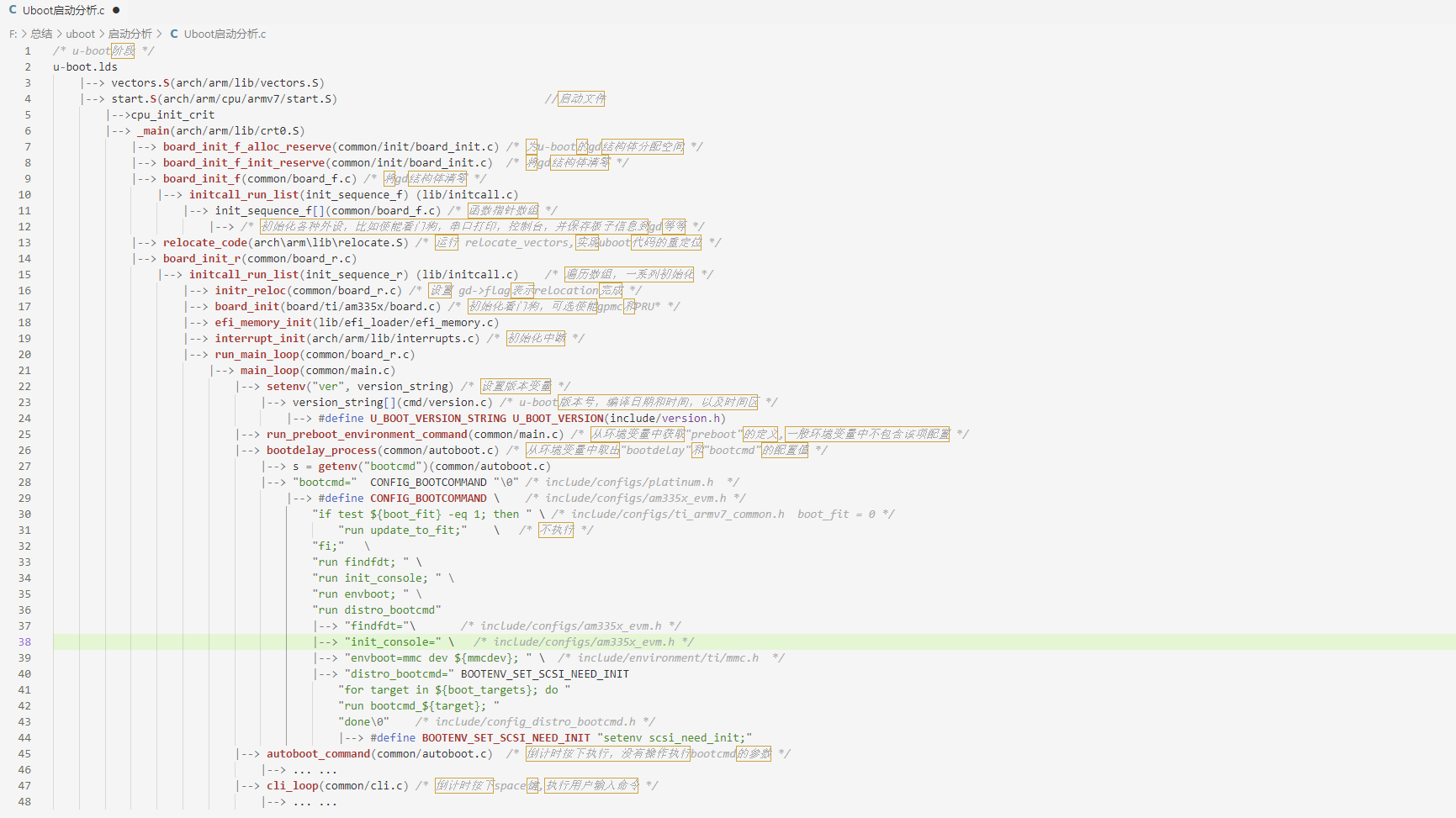
2.2、u-boot.lds——Uboot的入口函数
u-boot.lds:是uboot工程的链接脚本文件,对于工程的编译和链接有非常重要的作用,决定了uboot的组装,并且u-boot.lds链接文件中的ENTRY(_start)指定了uboot程序的入口地址。
如果不知道
u-boot.lds放到在哪里,可以通过find -name u-boot.lds查找,根目录要进入到uboot的源码的位置哦!如果查找结果有很多,结合自己的板子信息,确定自己使用的
u-boot.lds。当然,准确的方法是查看Makefile文件,分析出来
u-boot.lds所生成的位置。
在u-boot.lds的文件中,可以看到.text段,存放的就是执行的文本段。截取部分代码段如下:
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")
OUTPUT_ARCH(arm)
ENTRY(_start)
SECTIONS
{
. = 0x00000000; @起始地址
. = ALIGN(4); @四字节对齐
.text :
{
*(.__image_copy_start) @映像文件复制起始地址
*(.vectors) @异常向量表
arch/arm/cpu/armv7/start.o (.text*) @启动函数
}
......
}
-
ENTRY(_start):程序的入口函数,_start在arch/arm/lib/vectors.S中定义.globl _start -
SECTIONS定义了段,包括text文本段、data数据段、bss段等。 -
__image_copy_start在System.map和u-boot.map中均有定义 -
arch/arm/cpu/armv7/start.o对应文件arch/arm/cpu/armv7/start.S,该文件中定义了main函数的入口。
Tip:上面只进行大概分析,有汇编经验的朋友,可以详细进行分析!

2.3、board_init_f——板级前置初始化
跟随上文的程序执行流程图,我们看board_init_f这个函数。其位于common/board_f.c。
void board_init_f(ulong boot_flags)
{
gd->flags = boot_flags;
gd->have_console = 0;
if (initcall_run_list(init_sequence_f))
hang();
}
static const init_fnc_t init_sequence_f[] = {
setup_mon_len,
...
log_init,
arch_cpu_init, /* basic arch cpu dependent setup */
env_init, /* initialize environment */
...
reloc_fdt,
reloc_bootstage,
reloc_bloblist,
setup_reloc,
...
}
board_init_f(),其最核心的内容就是调用了init_sequence_f初始化序列,进行了一系列初始化的工作。
主要包括:串口、定时器、设备树、DM驱动模型等,另外还包括global_data结构体相关对象的变量。
详细分析,可以看文末的参考文章[1]
我们需要注意的一点就是,在初始化队列末尾,执行了几个reloc_xxx的函数,这几个函数实现了Uboot的重定向功能。
2.4、relocate_code重定向
重定向技术,可以说也算是
Uboot的一个重点了,也就是将uboot自身镜像拷贝到ddr上的另外一个位置的动作。
2.4.1 为什么需要重定向呢?
一般需要重定向的条件如下:
uboot存储在只读存储器上,比如ROM、Nor flash,需要将代码拷贝到DDR上,才能完整运行Uboot。- 为
Kernel腾空间,Kernel一般会放在DDR的地段地址上,所以要把Uboot重定向到顶端地址,避免冲突。
2.4.2 Uboot是如何重定向的?
Uboot的重定向有如下几个步骤:
- 对
relocate进行空间划分 - 计算uboot代码空间到
relocate的位置的偏移 relocate旧的global_data到新的global_data空间上relocateUboot- 修改
relocate后的全局变量的label relocate中断向量表
运行大致流程:
arch/arm/lib/crt0.S文件内,主要实现了:
ENTRY(_main)
bl board_init_f
@@ 在board_init_f里面实现了
@@ (1)对relocate进行空间规划
@@ (2)计算uboot代码空间到relocation的位置的偏移
@@ (3)relocate旧的global_data到新的global_data的空间上
ldr sp, [r9, #GD_START_ADDR_SP] /* sp = gd->start_addr_sp */
bic sp, sp, #7 /* 8-byte alignment for ABI compliance */
ldr r9, [r9, #GD_BD] /* r9 = gd->bd */
sub r9, r9, #GD_SIZE /* new GD is below bd */
@@ 把新的global_data地址放在r9寄存器中
adr lr, here
ldr r0, [r9, #GD_RELOC_OFF] /* r0 = gd->reloc_off */
add lr, lr, r0
@@ 计算返回地址在新的uboot空间中的地址。b调用函数返回之后,就跳到了新的uboot代码空间中。
ldr r0, [r9, #GD_RELOCADDR] /* r0 = gd->relocaddr */
@@ 把uboot的新的地址空间放到r0寄存器中,作为relocate_code的参数
b relocate_code
@@ 跳转到relocate_code中,在这里面实现了
@@ (1)relocate旧的uboot代码空间到新的空间上去
@@ (2)修改relocate之后全局变量的label
@@ 注意,由于上述已经把lr寄存器重定义到uboot新的代码空间中了,所以返回之后,就已经跳到了新的代码空间了!!!!!!
bl relocate_vectors
@@ relocate中断向量表
- setup_reloc——重定向地址查看(仿真有关)
在这里我们说明一下board_init_f里面的setup_reloc初始化函数
static int setup_reloc(void)
{
if (gd->flags & GD_FLG_SKIP_RELOC) {
debug("Skipping relocation due to flag\n");
return 0;
}
#ifdef CONFIG_SYS_TEXT_BASE
#ifdef ARM
gd->reloc_off = gd->relocaddr - (unsigned long)__image_copy_start;
#elif defined(CONFIG_M68K)
/*
* On all ColdFire arch cpu, monitor code starts always
* just after the default vector table location, so at 0x400
*/
gd->reloc_off = gd->relocaddr - (CONFIG_SYS_TEXT_BASE + 0x400);
#elif !defined(CONFIG_SANDBOX)
gd->reloc_off = gd->relocaddr - CONFIG_SYS_TEXT_BASE;
#endif
#endif
memcpy(gd->new_gd, (char *)gd, sizeof(gd_t));
debug("Relocation Offset is: %08lx\n", gd->reloc_off);
if (is_debug_open()) {
printf("Relocating to %08lx, new gd at %08lx, sp at %08lx\n",
gd->relocaddr, (ulong)map_to_sysmem(gd->new_gd),
gd->start_addr_sp);
}
return 0;
}
由于,Uboot进行了重定向,所以按照常规的地址仿真的话,我们可能访问到错误的内存空间,通过setup_reloc的Relocating to %08lx打印,我们可以得到重定向后的地址,方便我们仿真。
Uboot的重定向也有相当大的一部分知识点,上面也仅仅是简单介绍了relocate的基本步骤和流程,后续看大家需要,如果大家想了解,我再补上这一部分。
2.4.3 Uboot重定向作用
总之,Uboot重定向之后,把Uboot整体搬运到了高端内存区,为Kernel的加载提供空间,避免内存践踏。
2.5、board_init_r——板级后置初始化
我们接着跟着流程图往下看,重定向之后,Uboot运行于新的地址空间,接着我们执行
board_init_r,主要作为Uboot运行的最后初始化步骤。
board_init_r这个函数,同样位于common/board_f.c,主要用于初始化各类外设信息
void board_init_r(gd_t *new_gd, ulong dest_addr)
{
if (initcall_run_list(init_sequence_r))
hang();
/* NOTREACHED - run_main_loop() does not return */
hang();
}
static init_fnc_t init_sequence_r[] = {
initr_reloc,
initr_reloc_global_data,
board_init, /* Setup chipselects */
initr_dm,
initr_mmc,
...
run_main_loop
}
与board_init_f相同,同样有一个init_sequence_r初始化列表,包括:initr_dmDM模型初始化,initr_mmcMMC驱动初始化,等等。
最终,uboot就运行到了run_main_loop,进而执行main_loop这个函数。
2.6、main_loop——Uboot主循环
该函数为Uboot的最终执行函数,无论是加载kernel还是uboot的命令行体系,均由此实现。
void main_loop(void)
{
const char *s;
bootstage_mark_name(BOOTSTAGE_ID_MAIN_LOOP, "main_loop");
if (IS_ENABLED(CONFIG_VERSION_VARIABLE))
env_set("ver", version_string); /* set version variable */
cli_init();
if (IS_ENABLED(CONFIG_USE_PREBOOT))
run_preboot_environment_command();
if (IS_ENABLED(CONFIG_UPDATE_TFTP))
update_tftp(0UL, NULL, NULL);
s = bootdelay_process();
if (cli_process_fdt(&s))
cli_secure_boot_cmd(s);
autoboot_command(s);
cli_loop();
panic("No CLI available");
}
env_set:设置环境变量,两个参数分别为name和value
cli_init:用于初始化hash shell的一些变量
run_preboot_environment_command:执行预定义的环境变量的命令
bootdelay_process:加载延时处理,一般用于Uboot启动后,有几秒的倒计时,用于进入命令行模式。
cli_loop:命令行模式,主要作用于Uboot的命令行交互。
2.6.1 bootdelay_process
记得对照文章开始的执行流程图哦!
详细解释标注于代码中…
const char *bootdelay_process(void)
{
char *s;
int bootdelay;
bootcount_inc();
s = env_get("bootdelay"); //先判断是否有bootdelay环境变量,如果没有,就使用menuconfig中配置的CONFIG_BOOTDELAY时间
bootdelay = s ? (int)simple_strtol(s, NULL, 10) : CONFIG_BOOTDELAY;
if (IS_ENABLED(CONFIG_OF_CONTROL)) //是否使用设备树进行配置
bootdelay = fdtdec_get_config_int(gd->fdt_blob, "bootdelay",
bootdelay);
debug("### main_loop entered: bootdelay=%d\n\n", bootdelay);
if (IS_ENABLED(CONFIG_AUTOBOOT_MENU_SHOW))
bootdelay = menu_show(bootdelay);
bootretry_init_cmd_timeout();
#ifdef CONFIG_POST
if (gd->flags & GD_FLG_POSTFAIL) {
s = env_get("failbootcmd");
} else
#endif /* CONFIG_POST */
if (bootcount_error())
s = env_get("altbootcmd");
else
s = env_get("bootcmd"); //获取bootcmd环境变量,用于后续的命令执行
if (IS_ENABLED(CONFIG_OF_CONTROL))
process_fdt_options(gd->fdt_blob);
stored_bootdelay = bootdelay;
return s;
}
2.6.2 autoboot_command
详细解释标注于代码中…
void autoboot_command(const char *s)
{
debug("### main_loop: bootcmd=\"%s\"\n", s ? s : "<UNDEFINED>");
if (stored_bootdelay != -1 && s && !abortboot(stored_bootdelay)) {
bool lock;
int prev;
lock = IS_ENABLED(CONFIG_AUTOBOOT_KEYED) &&
!IS_ENABLED(CONFIG_AUTOBOOT_KEYED_CTRLC);
if (lock)
prev = disable_ctrlc(1); /* disable Ctrl-C checking */
run_command_list(s, -1, 0);
if (lock)
disable_ctrlc(prev); /* restore Ctrl-C checking */
}
if (IS_ENABLED(CONFIG_USE_AUTOBOOT_MENUKEY) &&
menukey == AUTOBOOT_MENUKEY) {
s = env_get("menucmd");
if (s)
run_command_list(s, -1, 0);
}
}
我们看一下判断条件stored_bootdelay != -1 && s && !abortboot(stored_bootdelay
stored_bootdelay:为环境变量的值,或者menuconfig设置的值s:为环境变量bootcmd的值,为后续运行的指令abortboot(stored_bootdelay):主要用于判断是否有按键按下。如果按下,则不执行bootcmd命令,进入cli_loop命令行模式;如果不按下,则执行bootcmd命令,跳转到加载Linux启动。
2.6.3 cli_loop
void cli_loop(void){
bootstage_mark(BOOTSTAGE_ID_ENTER_CLI_LOOP);#ifdef CONFIG_HUSH_PARSER parse_file_outer(); /* This point is never reached */ for (;;); //死循环#elif defined(CONFIG_CMDLINE) cli_simple_loop();#else printf("## U-Boot command line is disabled. Please enable CONFIG_CMDLINE\n");#endif /*CONFIG_HUSH_PARSER*/}
如上代码,程序只执行parse_file_outer来处理用户的输入、输出信息。
好啦,基本到这里,我们已经对Uboot的启动流程了然于胸了吧!
当然,更深层次的不建议去深入了解,有时间可以慢慢去研究。
大家有疑问,可以评论区交流…
2.7 参考文章:
[1]:boadr_init_f介绍
[2]:启动流程参考
[3]:main_loop相关