基于透镜成像学习策略的灰狼优化算法
文章目录
摘要: 在灰狼优化算法中 , C是一个重要的参数 , 其功能是负责算法的勘探能力 . 目前 , 针对参数 C的研究工作相对较少 .另外 , 在算法进化过程中 , 群体中其他个体均向 α 、 β 和 δ 所在区域靠近以加快收敛速度 . 然而 , 算法易陷入局部最优 . 为解决以上问题 , 本文提出一种改进的灰狼优化算法 (Lens imaging learning grey wolf optimizer algorithm, LIL-GWO). 该算法首先分析了参数 C 的作用 , 提出一种新的参数 C 策略以平衡算法的勘探和开采能力 ; 同时 , 分析了灰狼优化算法后期个体均向决策层区域聚集 , 从而导致群体多样性较差 , 提出一种基于光学透镜成像原理的反向学习策略以避免算法陷入局部最优 .
1.灰狼优化算法
基础灰狼优化算法的具体原理参考,我的博客:https://blog.csdn.net/u011835903/article/details/107716390
2.基于透镜成像学习的 GWO 算法
2.1修改控制参数C策略
为了平衡 GWO 算法的全局勘探和局部开采能力 , 本文提出一种修改的控制参数C策略 , 其具体表达式如下 :
C = 2 × r 3 − a (11) \boldsymbol{C}=2 \times \boldsymbol{r}_{3}-\boldsymbol{a} \tag{11} C=2×r3−a(11)
r 3 r_3 r3是 [0.5, 1.5] 之间的随机向量 。
2.2 透镜成像反向学习策略
全局最优个体 x ∗ x^* x∗以O为基点得到其对应的反向点 x ′ ∗ x^{'*} x′∗
x ′ ∗ = a + b 2 + a + b 2 k − x ∗ k (13) x^{\prime *}=\frac{a+b}{2}+\frac{a+b}{2 k}-\frac{x^{*}}{k} \tag{13} x′∗=2a+b+2ka+b−kx∗(13)
一般地 , 将式 (13) 所示的基于透镜成像原理的反向学习策略推广到 D 维空间可得到
x j ′ ∗ = a j + b j 2 + a j + b j 2 k − x j ∗ k (15) x_{j}^{\prime*}=\frac{a_{j}+b_{j}}{2}+\frac{a_{j}+b_{j}}{2 k}-\frac{x_{j}^{*}}{k} \tag{15} xj′∗=2aj+bj+2kaj+bj−kxj∗(15)
其中 , x j ∗ x^*_j xj∗和 x j ′ ∗ x_j^{\prime *} xj′∗分别为 x j ∗ x^*_j xj∗和 x j ′ ∗ x_j^{\prime *} xj′∗的第 j 维分量 , a j a_j aj和 b j b_j bj 分别为决策变量的上下界的第 j j j维分量。
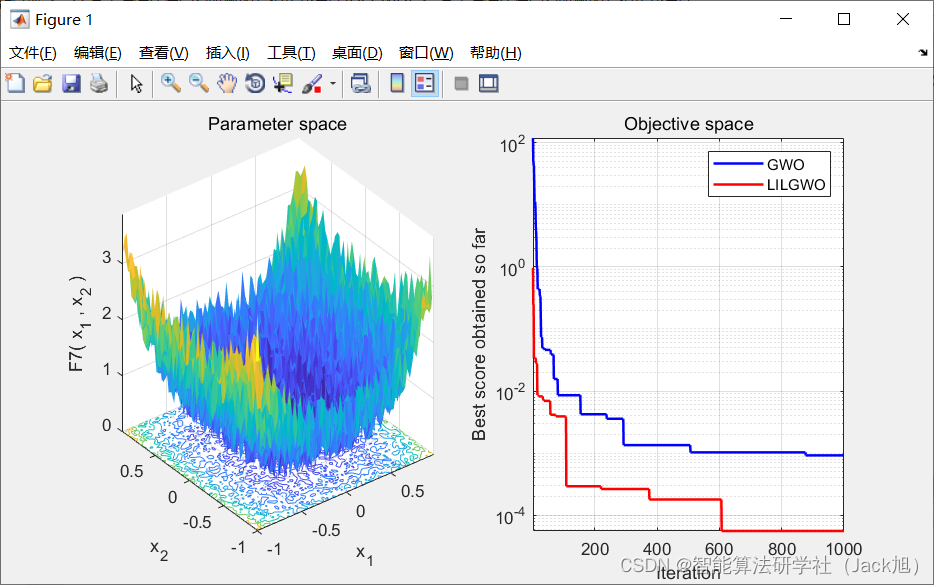
3.实验结果
4.参考文献
[1]龙文,伍铁斌,唐明珠,徐明,蔡绍洪.基于透镜成像学习策略的灰狼优化算法[J].自动化学报,2020,46(10):2148-2164.