本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。
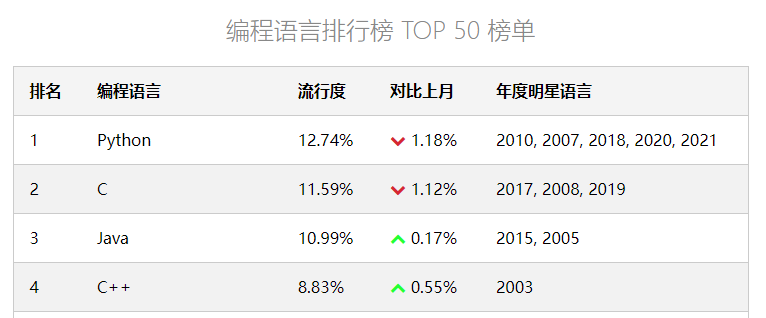
做机器人最常用的两门语言就是C++和Python,同时这两门语言也是编程语言流行度排行榜数一数二的。
听说牛逼的大佬都用记事本写代码,这节小鱼带你在Linux版记事本之gedit上写一下C++和Python代码。
1.Hello FishRos
1.1 Python版
打开终端,创建一个d2lros2文件夹接着在文件夹下创建chapt1文件夹。
mkdir d2lros2
cd d2lros2
mkdir chapt1Copy to clipboardErrorCopied
接着输入下面的指令打开gedit并创建文件
gedit hello_fishros.pyCopy to clipboardErrorCopied
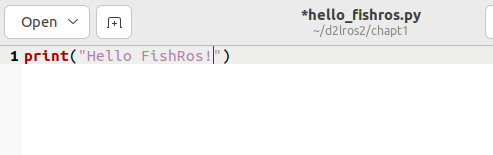
接着你应该看到一个类似于记事本的东西,在里面输入下面一段代码,打印一句话
print("Hello FishRos!")Copy to clipboardErrorCopied
使用Ctrl+S保存代码
关掉gedit,接着在终端输入下面的指令运行这段脚本
python3 hello_fishros.pyCopy to clipboardErrorCopied
如果一切正常,你将看到

1.2 C++版
接着我们来学习C++版本的打印一句话。
进入终端,用gedit再次编辑一个叫做hello_fishros.cpp的文件。
cd d2lros2/chapt1/
gedit hello_fishros.cppCopy to clipboardErrorCopied
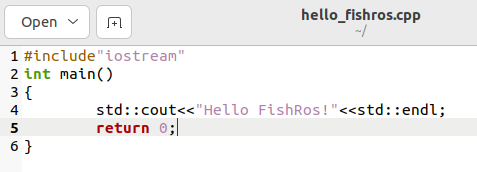
输入下面的内容
#include"iostream"
int main(){
std::cout<<"Hello FishRos!"<<std::endl;
return 0;
}Copy to clipboardErrorCopied
你会发现C++代码要比Python复杂很多,这也是近年来人生苦短,我用Python的来源。
保存代码,关闭gedit。
更麻烦的是你还不能直接运行C++的代码,C++代码必须经过编译构建之后才能运行。
C++的编译工具使用的是g++,默认是不安装的,所以我们需要手动安装一下g++。
使用上节课讲到的安装工具安装g++
sudo apt install g++Copy to clipboardErrorCopied
接着在终端输入下面的指令对刚刚的代码进行编译。
g++ hello_fishros.cppCopy to clipboardErrorCopied
如报错请尝试安装:sudo apt-get install build-essential
接着使用ls指令,你应该可以看到一个叫做a.out的文件。恭喜,现在你可以运行了。
输入下面的指令即可运行
./a.outCopy to clipboardErrorCopied

请不要小看Linux中的
.,它的用途很广,比如这里就是用于执行文件./文件名
2.为什么C++需要编译
2.1 编译执行和解释执行的区别
在知乎上看到一个比喻,非常好。
编译相当于做好了一桌子菜,可以直接开吃了。

而解释就相当于吃火锅,需要一边煮一边吃。

那么自然,吃的效率也会低一些。
2.2 编译执行
编译执行需要在运行之前把代码翻译成计算机认识的二进制文件,执行的时候就不需要再次翻译了,计算机可以直接看的懂。
C++的代码就是需要编译器进行翻译的,其翻译器的名字就叫做g++,该编译器非常的有名。
可以参阅下面的文章
2.3 解释执行
Python可以说是解释执行的语言了,在运行前不需要翻译,运行时由解释器一句句解释运行即可。
2.4 编译VS解释
- 编译型语言,执行速度快、效率高;依靠编译器、跨平台性差些。
- 解释型语言,执行速度慢、效率低;依靠解释器、跨平台性好。
编译型的语言包括:C、C++、Delphi、Pascal、Fortran 解释型的语言包括:Java、Basic、javascript