一、监督学习简介
给定一组数据点 关联到一组结果
,我们想要构建一个分类器,学习如何从
预测
。
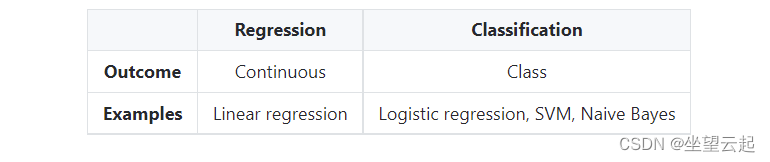
1、预测类型
下表总结了不同类型的预测模型:
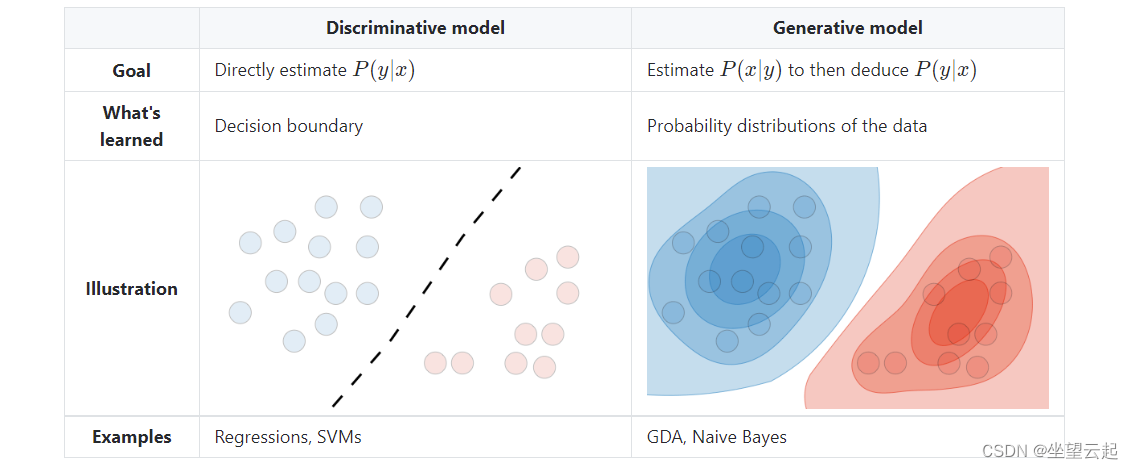
2、模型类型
下表总结了不同的模型:
二、符号和一般概念
1、Hypothesis
该假设被标记为 并且是我们选择的模型。 对于给定的输入数据
,模型预测输出为
。
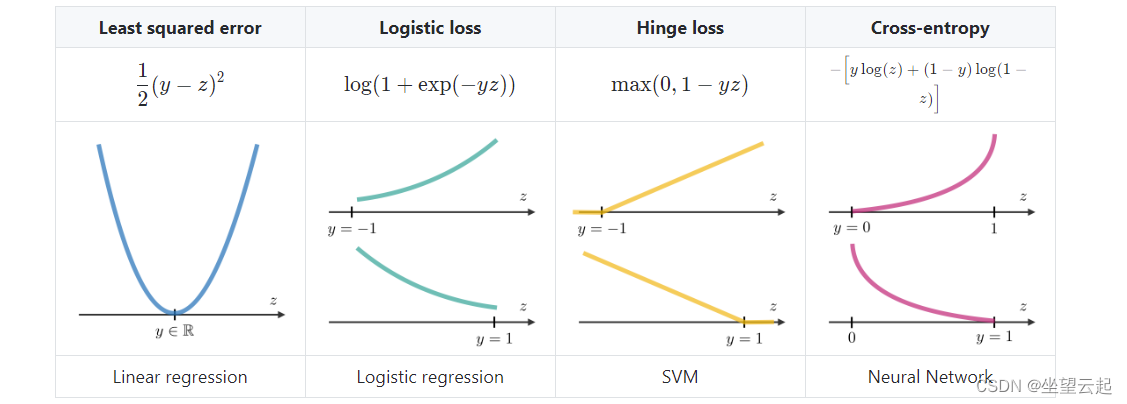
2、Loss function
损失函数是一个函数 ,它将与真实数据值
对应的预测值
作为输入,并输出它们的差异程度。 下表总结了常见的损失函数:
3、Cost function
成本函数 通常用于评估模型的性能,其损失函数
定义如下:
4、Gradient descent
通过注意 学习率,梯度下降的更新规则用学习率和成本函数
表示如下:
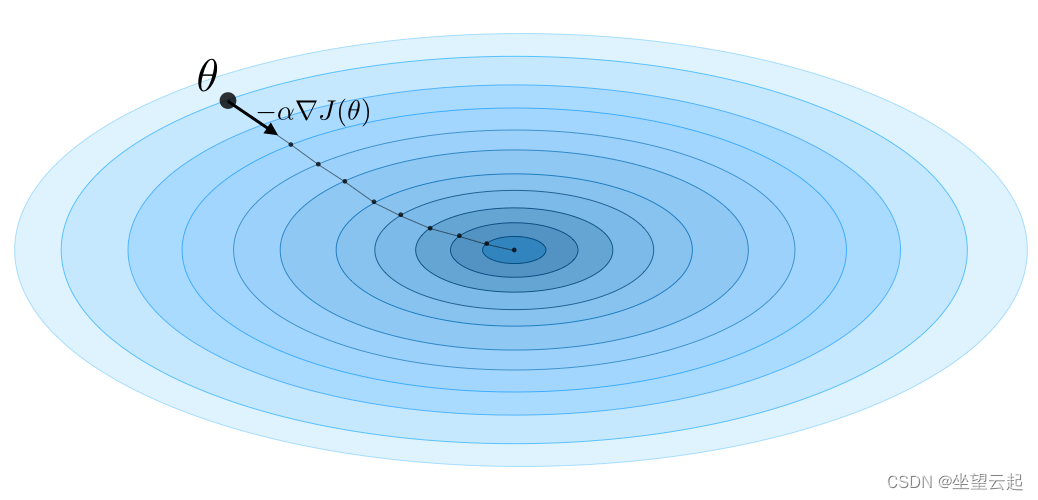
备注:随机梯度下降(SGD)是根据每个训练样例更新参数,批梯度下降是在一批训练样例上进行的。
5、Likelihood
给定参数 的模型
的似然性用于通过似然最大化来找到最优参数
。 我们有:
备注:在实践中,我们使用更容易优化的对数似然。
6、Newton's algorithm
牛顿算法是一种求 的数值方法,使得
。 其更新规则如下:
备注:多维泛化,也称为Newton-Raphson方法,有如下更新规则:
三、线性模型
1、线性回归
我们在这里假设
(1)Normal equations
通过注意设计矩阵 ,最小化成本函数的
的值是一个封闭形式的解决方案,使得:
(2)LMS algorithm
通过注意 α 学习率,最小均方 (LMS) 算法对 m 数据点的训练集的更新规则,也称为 Widrow-Hoff 学习规则,如下所示:
备注:更新规则是梯度上升的特例。
(3)LWR
局部加权回归,也称为 LWR,是线性回归的一种变体,它通过 在其成本函数中对每个训练样例进行加权,它由参数
定义为:
2、分类和逻辑回归
(1)Sigmoid 函数
sigmoid函数,也称为逻辑函数,定义如下:
(2)Logistic regression
我们在这里假设 。 我们有以下形式:
备注:逻辑回归没有封闭形式的解决方案。
(3)Softmax regression
当有超过 2 个结果类别时,softmax 回归,也称为多类逻辑回归,用于泛化逻辑回归。 按照惯例,我们设置 ,这使得每个类
的伯努利参数
为:
3、广义线性模型
(1)Exponential family
如果一类分布可以用自然参数(也称为规范参数或链接函数)、、充分统计量
和对数来编写,则称它属于log-partition函数
如下:
备注:我们经常会有 。 此外,
可以被视为一个标准化参数,它将确保概率总和为1。
下表总结了最常见的指数分布:

(2)Assumptions of GLMs
广义线性模型 (GLM) 旨在预测随机变量 作为
的函数,并依赖于以下 3 个假设:
(1) (2)
(3)
备注:普通最小二乘法和逻辑回归是广义线性模型的特例。
四、支持向量机
支持向量机的目标是找到与直线的最小距离最大的直线。
1、Optimal margin classifier
最佳边距分类器 是这样的:
,其中
是以下优化问题的解:

备注:决策边界定义为
2、Hinge loss
hinge loss用于 SVM 的设置,定义如下:
3、Kernel
给定一个特征映射 ,我们将内核
定义如下:
在实践中,由 定义的核
称为高斯核,较常用。
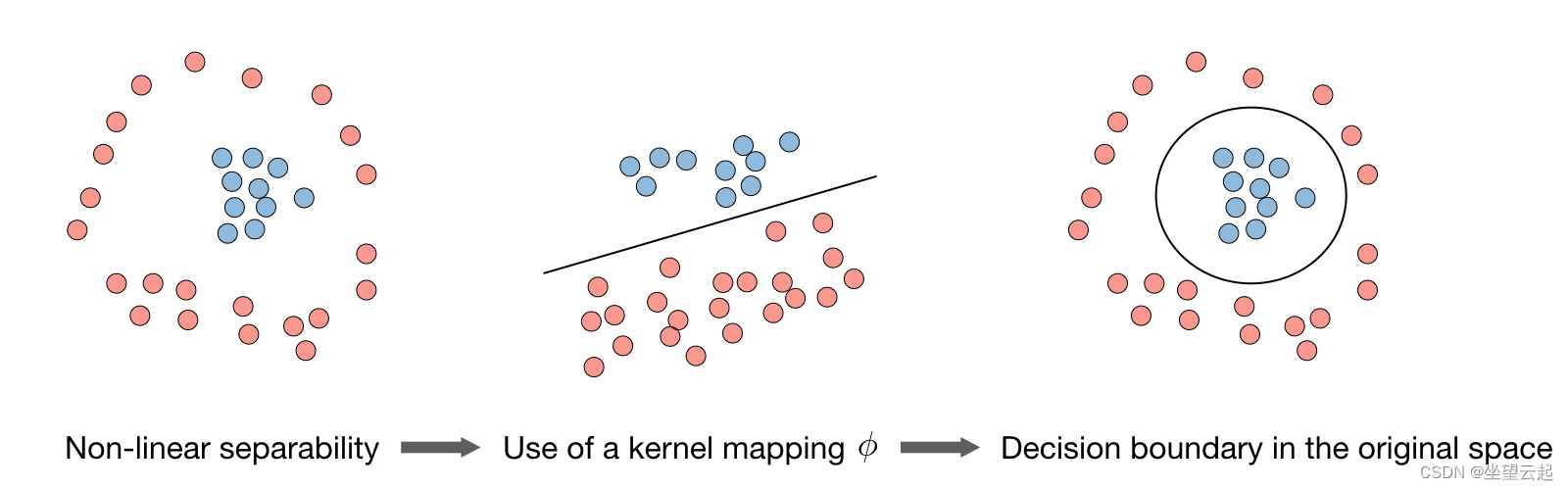
备注:我们说我们使用“内核技巧”来使用内核计算成本函数,因为我们实际上不需要知道显式映射 ,这通常非常复杂。 相反,只需要值
。
4、Lagrangian
我们将拉格朗日 定义如下:
备注:系数 称为拉格朗日乘数。
五、生成学习
生成模型首先尝试通过估计 来学习如何生成数据,然后我们可以使用贝叶斯估计
规则。
1、Gaussian Discriminant Analysis
(1)Setting
高斯判别分析假设 和
和
是这样的:
(1) (2)
(3)
(2)Estimation
下表总结了我们在最大化似然性时发现的估计值:

2、Naive Bayes
(1)Assumption
朴素贝叶斯模型假设每个数据点的特征都是独立的:
(2)Solutions
最大化对数似然给出以下解决方案:
备注:朴素贝叶斯广泛用于文本分类和垃圾邮件检测。
六、基于树和集成方法
这些方法可用于回归和分类问题。
1、CART
分类和回归树(CART),俗称决策树,可以表示为二叉树。 它们的优点是易于解释。
2、Random forest
它是一种基于树的技术,它使用由随机选择的特征集构建的大量决策树。 与简单的决策树相反,它是高度不可解释的,但其普遍良好的性能使其成为一种流行的算法。备注:随机森林是一种集成方法。
3、Boosting
提升方法的想法是将几个弱学习器组合成一个更强的学习器。 主要的总结如下表:
| Adaptive boosting | Gradient boosting |
| • High weights are put on errors to improve at the next boosting step • Known as Adaboost |
• Weak learners are trained on residuals • Examples include XGBoost |
七、其他非参数方法
1、k-nearest neighbors
k-最近邻算法,通常称为 k-NN,是一种非参数方法,其中数据点的响应由训练集中的 k 个邻居的性质决定。 它可以用于分类和回归设置。
注:参数 k 越高,偏差越大,参数 k 越低,方差越高。

八、学习理论
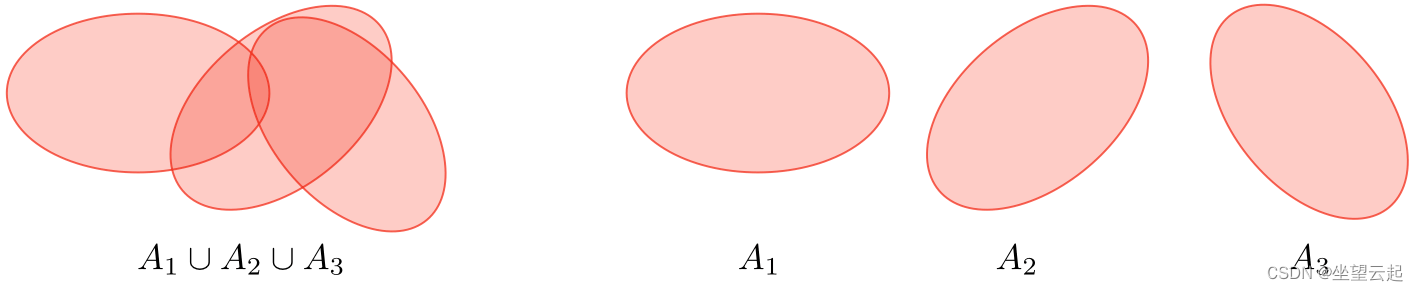
1、Union bound
令 为 k 个事件。 我们有:
2、Hoeffding inequality
令 是从参数
的伯努利分布中提取的 m iid 变量。 设
为他们的样本均值,并且
固定。 我们有:
备注:这个不等式也称为切尔诺夫界。
3、Training error
对于给定的分类器 h,我们定义训练误差 ,也称为经验风险或经验误差,如下:
4、Probably Approximately Correct (PAC)
PAC 是一个框架,在此框架下证明了学习理论的许多结果,并具有以下一组假设:
训练集和测试集遵循相同的分布
训练样例是独立绘制的
5、Shattering
给定一个集合 和一组分类器
,我们说
对于
如果对于任何一组标签
,我们有:
6、Upper bound theorem
令 是一个有限假设类,使得
并且令
和样本大小
是固定的。 然后,以至少
的概率,我们有:
7、VC dimension
给定无限假设类 的 Vapnik-Chervonenkis (VC) 维数,记为
是被
打散的最大集合的大小。
注:的VC维数为3。

8、Theorem (Vapnik)
设 ,
和
是训练样本的数量。 以至少
的概率,我们有: