使用TensorFlow、Keras和深度学习实现像素无序超分辨率》
pixel shuffle Super Resolution 像素无序/洗牌超分辨率
Deep Learning Super Sampling(DLSS 深度学习超级采样)
Redisual Dense Blocks RDB残差密集块
当图像的大小(在空间上沿着宽度和高度)增加时,传统方法产生新的像素信息通常会降低图像质量,从而输出柔和模糊的图像。深度学习提供了许多可行的方案来解决这个问题。
这篇博客将介绍一种使用带有RDB的高效亚像素CNN实现超分辨率的方法。 使用RDB对PSNR统计数据没有任何显著影响。然而可视化后,亚像素CNN产生的图像质量比原始图像要清晰一些。
1. 效果图
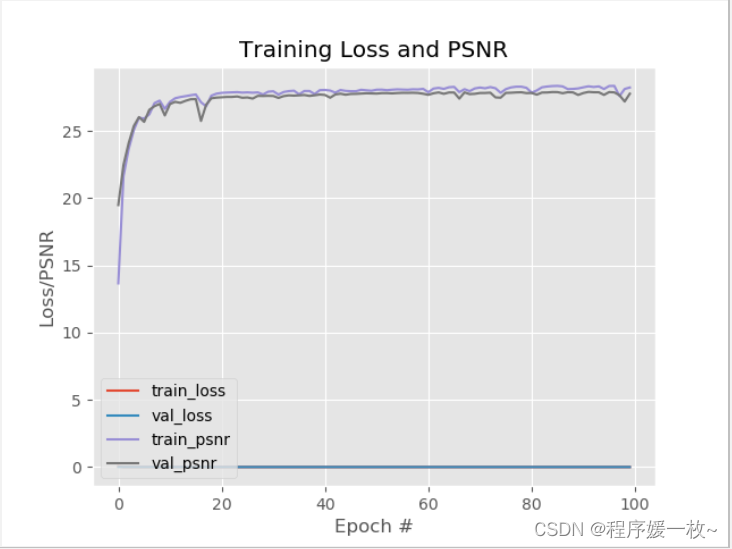
训练模型耗时3h多,结果如下:
最终验证损失为0.0019,验证PSNR得分为28.2448。
E:\python\python.exe C:\Users\admin\.IntelliJIdea2018.3\config\plugins\python\helpers\pydev\pydevd.py --multiproc --qt-support=auto --client 127.0.0.1 --port 51849 --file D:/deepLearning/py-demo/p220522/train.py
pydev debugger: process 7440 is connecting
Connected to pydev debugger (build 183.4588.61)
[INFO] loading images from disk...
2022-05-22 12:04:03.599901: I tensorflow/core/platform/cpu_feature_guard.cc:142] Your CPU supports instructions that this TensorFlow binary was not compiled to use: AVX2
[INFO] preparing data loaders...
[INFO] initializing and training model...
Epoch 1/100
...
...
...
25/25 [==============================] - 88s 4s/step - loss: 0.0020 - psnr: 28.1353 - val_loss: 0.0023 - val_psnr: 27.2020
Epoch 100/100
1/25 [>.............................] - ETA: 1:15 - loss: 0.0015 - psnr: 29.6192
2/25 [=>............................] - ETA: 1:12 - loss: 0.0017 - psnr: 28.7771
3/25 [==>...........................] - ETA: 1:11 - loss: 0.0017 - psnr: 28.8514
4/25 [===>..........................] - ETA: 1:08 - loss: 0.0017 - psnr: 28.8678
5/25 [=====>........................] - ETA: 1:05 - loss: 0.0021 - psnr: 28.0601
6/25 [======>.......................] - ETA: 1:01 - loss: 0.0020 - psnr: 28.0730
7/25 [=======>......................] - ETA: 58s - loss: 0.0020 - psnr: 28.0669
8/25 [========>.....................] - ETA: 55s - loss: 0.0020 - psnr: 28.1785
9/25 [=========>....................] - ETA: 52s - loss: 0.0020 - psnr: 28.0880
10/25 [===========>..................] - ETA: 49s - loss: 0.0019 - psnr: 28.3325
11/25 [============>.................] - ETA: 45s - loss: 0.0019 - psnr: 28.2930
12/25 [=============>................] - ETA: 42s - loss: 0.0019 - psnr: 28.2417
13/25 [==============>...............] - ETA: 39s - loss: 0.0019 - psnr: 28.2730
14/25 [===============>..............] - ETA: 35s - loss: 0.0019 - psnr: 28.3979
15/25 [=================>............] - ETA: 32s - loss: 0.0020 - psnr: 28.2489
16/25 [==================>...........] - ETA: 29s - loss: 0.0019 - psnr: 28.3183
17/25 [===================>..........] - ETA: 26s - loss: 0.0019 - psnr: 28.3801
18/25 [====================>.........] - ETA: 23s - loss: 0.0019 - psnr: 28.2734
19/25 [=====================>........] - ETA: 19s - loss: 0.0019 - psnr: 28.4116
20/25 [=======================>......] - ETA: 16s - loss: 0.0020 - psnr: 28.3088
21/25 [========================>.....] - ETA: 13s - loss: 0.0019 - psnr: 28.3143
22/25 [=========================>....] - ETA: 9s - loss: 0.0019 - psnr: 28.3368
23/25 [==========================>...] - ETA: 6s - loss: 0.0019 - psnr: 28.3044
24/25 [===========================>..] - ETA: 3s - loss: 0.0019 - psnr: 28.3232
2022-05-22 14:58:37.135772: W tensorflow/core/common_runtime/base_collective_executor.cc:216] BaseCollectiveExecutor::StartAbort Out of range: End of sequence
[[{
{
node IteratorGetNext}}]]
25/25 [==============================] - 93s 4s/step - loss: 0.0019 - psnr: 28.2448 - val_loss: 0.0021 - val_psnr: 27.7841
[INFO] serializing model...
下图显示了训练历史曲线及不同时期的训练损失和PSNR分数。
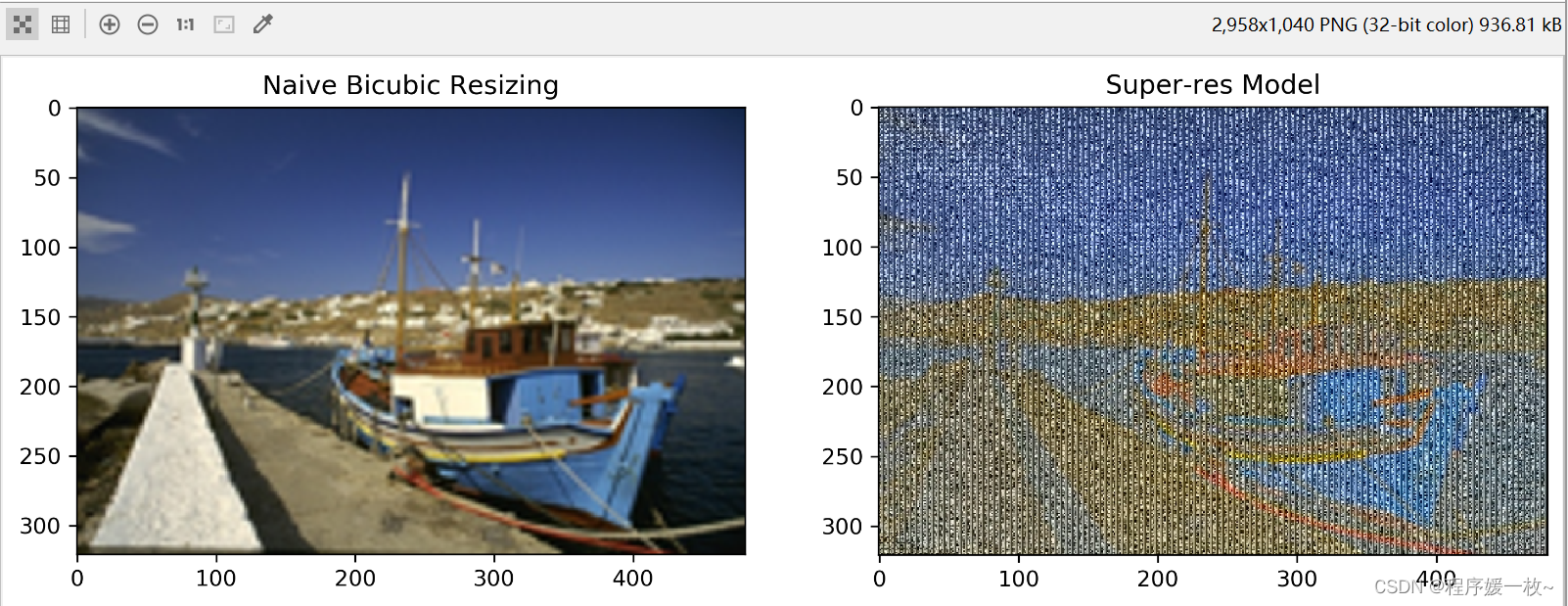
标准插值 VS RDB超分辨率模型输出 效果图1如下:
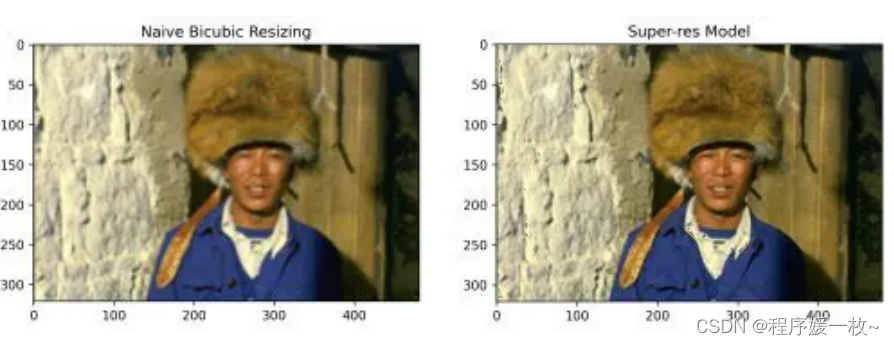
使用RDB对PSNR统计数据没有任何显著影响。然而在图像可视化后,可以看到它们在视觉质量上比单纯的双三次方法优越得多。
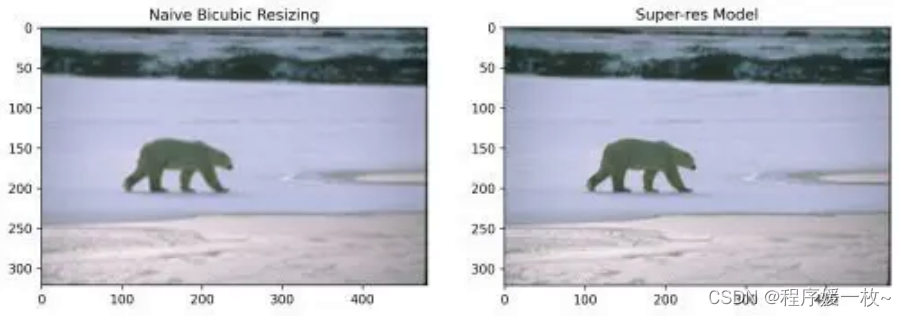
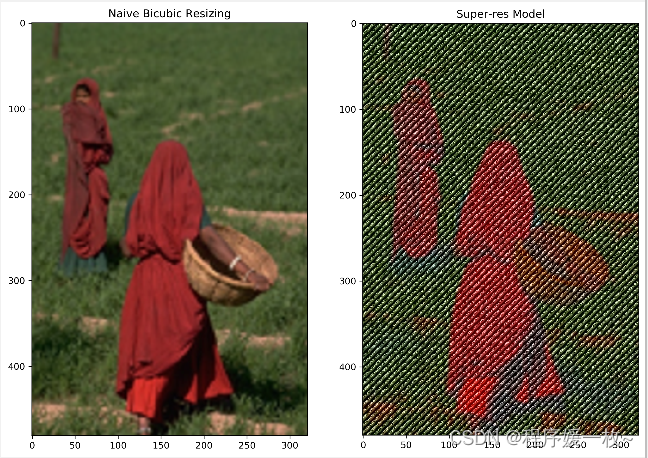
标准插值 VS RDB超分辨率模型输出 效果图2如下:
标准插值 VS RDB超分辨率模型输出 效果图3如下:
本地训练的模型不知道哪里出了问题,效果图不好;
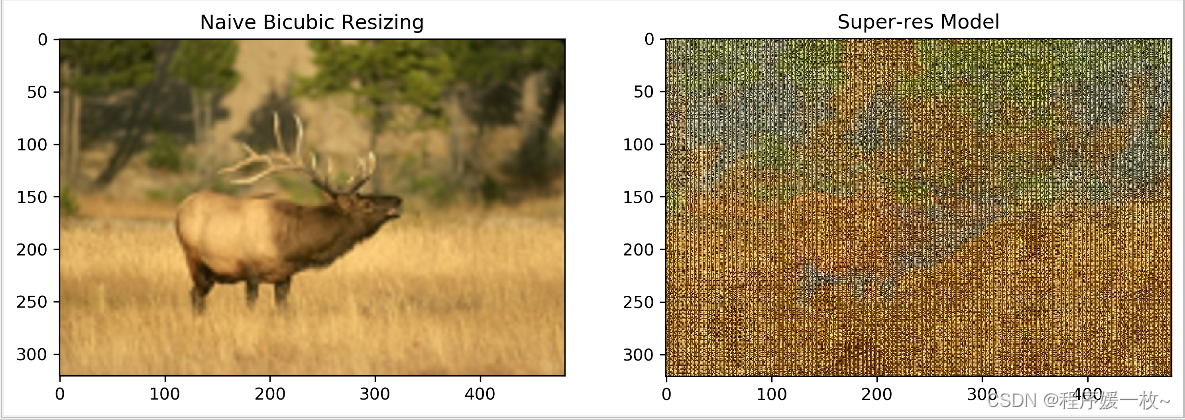
标准插值 VS RDB超分辨率模型输出 效果图4如下:
标准插值 VS RDB超分辨率模型输出 效果图4如下:
RDN能够很好地学习层次结构特征,使图像能够以非常值得称赞的视觉质量进行放大。
2. 原理
2.1 环境配置
pip install tensorflow
pip install pillow
pip install imutils
2.2 步骤
本博客将涵盖:
- 利用BSDS500数据集
- 了解残差密集块体系结构(Residual Dense Block architecture)
- 实现像素洗牌
- 展示了一系列预处理和后处理方法
- 训练自己的超分辨率模型
- 从模型结果中预测
- 根据标准指标评估结果
- 在模型上测试自己的图像
2.3 什么是像素无序超分辨率
超分辨率是一类技术的总称,其中添加了精确或接近精确的像素信息,以从低分辨率形式构建高分辨率图像,同时保持其原始质量。
像素无序超分辨率是一种上采样技术,其中图像超分辨率是通过一种相当巧妙的方法实现的。特征图是在LR(低分辨率)空间中提取的(与早期在HR(高分辨率)空间中提取的技术相反)。
- 该方法的亮点是一种新型高效的亚像素卷积层,它学习一组滤波器,将最终的LR特征映射放大到HR输出中。
- 降低了时间复杂度,因为一大块计算是在图像处于低分辨率状态时完成的。
- 使用了残差密集块(RDB Residual Dense Blocks),这是一种在计算当前层的输出的同时,重点关注保持前几层中提取的信息的活性的体系结构。
当从最初的层遍历到后来的层时,CNN的层将简单的特征提取到越来越复杂/抽象/高级的特征。RDB打算通过使用卷积层的密集连接网络提取尽可能多的层次特征,尽可能多地利用这一思想。
如下图所示,在RDB中所有层都是相互连接的,以确保充分提取局部特征。每个图层从所有以前的图层获得额外的输入(通过串联),并将其自己的要素贴图传递给后续图层。RDB利用了ResNets 和 Dense Blocks这俩个概念;
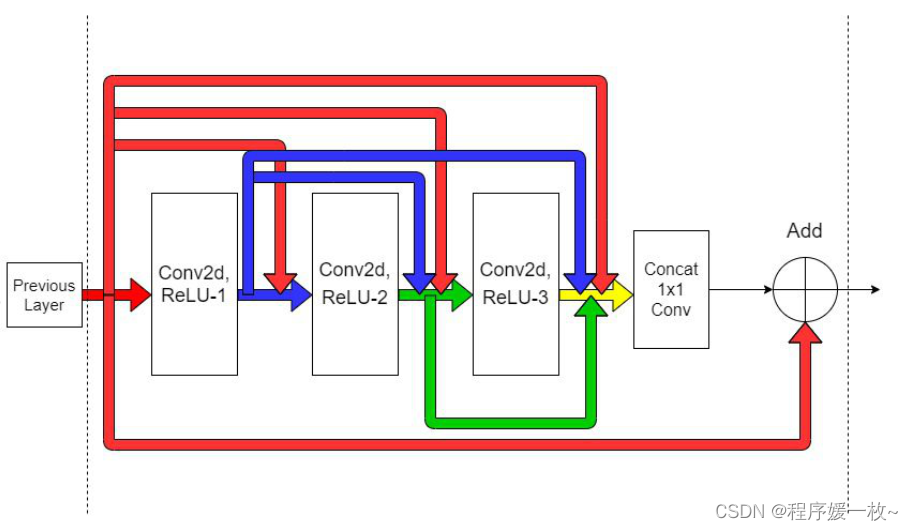 这样网络的前馈特性也得以保留。前几层的输出直接链接到当前RDB中的所有本地连接。简单来说是,来自前一层的信息将始终与当前状态一起可用,这使模型能够自适应地从各种特征中选择和优先排序。
这样网络的前馈特性也得以保留。前几层的输出直接链接到当前RDB中的所有本地连接。简单来说是,来自前一层的信息将始终与当前状态一起可用,这使模型能够自适应地从各种特征中选择和优先排序。
3. 核心源码
——全部代码见
# 使用经过训练的带有RDB(Redisual Dense Blocks)亚像素CNN模型并生成超分辨率图像。它还包含几个用于图像预处理和后处理的函数。
# 模型的图表和分数表明,使用RDB不会显著提高PSNR统计数据。神奇之处在哪儿呢?测试感受一下
# output/super_res_model 存放训练好的模型
# output/training.png 样本模型评估图
# out/visualizations 存放生成的所有超分辨率图
# USAGE
# python generate_super_res.py
import os
# 导入必要的包
import cv2
import matplotlib.pyplot as plt
import numpy as np
import tensorflow as tf
from PIL import Image
from imutils import paths
from tensorflow.keras.models import load_model
from tensorflow.keras.preprocessing.image import load_img
from pyimageserach import config
# 导入必要的包
# 定义另一个函数psnr,它计算预测输出和原始图像的psnr。
# 峰值信噪比越高表示结果越好。
def psnr(orig, pred):
# 转换目标图像为int
orig = orig * 255.0
orig = tf.cast(orig, tf.int32)
orig = tf.clip_by_value(orig, 0, 255)
# 转换预测图像为int
pred = pred * 255.0
pred = tf.cast(pred, tf.int32)
pred = tf.clip_by_value(pred, 0, 255)
# 返回psnr
return tf.image.psnr(orig, pred, max_val=255)
def load_image(imagePath):
print(imagePath)
# 加载图像,使用标准三插值方法进行下采样
orig = load_img(imagePath)
downsampled = orig.resize((orig.size[0] // config.DOWN_FACTOR,
orig.size[1] // config.DOWN_FACTOR), Image.BICUBIC)
# 返回tuple包含原始图像和下采样图像
return (orig, downsampled)
def get_y_channel(image):
# 将RGB图像转换为YCbCr颜色空间,并拆分为单独的通道
ycbcr = image.convert("YCbCr")
(y, cb, cr) = ycbcr.split()
# 转换Y通道为numpy数组,转换为像素值为[0.0,1.0]范围
y = np.array(y)
y = y.astype("float32") / 255.0
# 返回单独通道值的元组
return (y, cb, cr)
# 根据给定的范围剪裁图像的值。
# 此函数是后处理步骤的一部分,将范围从[0.0,1.0]放大到[0,255],并剪裁超出给定边界的任何值
def clip_numpy(image):
# 转换图像为int值,剪切像素为[0, 255]
image = tf.cast(image * 255.0, tf.int32)
image = tf.clip_by_value(image, 0, 255).numpy()
# 返回图像
return image
def postprocess_image(y, cb, cr):
# 进行一些初始预处理,重塑形状以匹配原始形状大小,然后将其转换为PIL图像
y = clip_numpy(y).squeeze()
y = y.reshape(y.shape[0], y.shape[1])
y = Image.fromarray(y, mode="L")
# 调整其他渠道以匹配原始图像大小
outputCB = cb.resize(y.size, Image.BICUBIC)
outputCR = cr.resize(y.size, Image.BICUBIC)
# 合并调整后的通道,并以numpy数组返回
final = Image.merge("YCbCr", (y, outputCB, outputCR)).convert("RGB")
return np.array(final)
# 从磁盘加载测试图像路径,随机选择10个图像
print("[INFO] loading test images...")
testPaths = list(paths.list_images(config.TEST_SET))
currentTestPaths = np.random.choice(testPaths, 10)
# 从磁盘加载超分辨率模型
print("[INFO] loading model...", config.SUPER_RES_MODEL)
# superResModel = load_model(config.SUPER_RES_MODEL)
# .h5模型设置 custom_objects就可以解决,.pb不行,得先设置compile=False,然后手动compile
superResModel = load_model(config.SUPER_RES_MODEL,
custom_objects={
"psnr": psnr})
# superResModel = load_model(config.SUPER_RES_MODEL, compile=False)
# superResModel.compile(optimizer="adam", loss="mse", metrics=[psnr])
# 遍历测试图像路径
print("[INFO] performing predictions...")
for (i, path) in enumerate(currentTestPaths):
# 从当前路径获取原始和下采样图像路径
(orig, downsampled) = load_image(path)
# 提取当前图像的所有通道,进行预测
(y, cb, cr) = get_y_channel(downsampled)
print(y.shape, type(y))
# y = y[None, ...]
# print(y.shape)
y = np.reshape(y, (y.shape[0], y.shape[1], 1))
print('new: ', y.shape)
upscaledY = superResModel.predict(y[None, ...])[0]
cv2.imshow("res", upscaledY)
# cv2.waitKey(0)
print('res:', upscaledY.shape)
# upscaledY = np.reshape(upscaledY, (upscaledY.shape[0], upscaledY.shape[1]))
# print(upscaledY.shape)
# upscaledY = upscaledY.astype(np.float32)
# upscaledY = tf.image.convert_image_dtype(upscaledY, tf.float32)
# upscaledY = np.array(upscaledY, np.float32)
print(upscaledY.shape, upscaledY.dtype)
# 对输出进行后处理,并使用标准三插值采样图像以进行比较
finalOutput = postprocess_image(upscaledY, cb, cr)
naiveResizing = downsampled.resize(orig.size, Image.BICUBIC)
# 可视化结果,并存储到磁盘
path = os.path.join(config.VISUALIZATION_PATH, f"{
i}_viz.png")
(fig, (ax1, ax2)) = plt.subplots(ncols=2, figsize=(12, 12))
ax1.imshow(naiveResizing)
ax2.imshow(finalOutput.astype("int"))
ax1.set_title("Naive Bicubic Resizing")
ax2.set_title("Super-res Model")
fig.savefig(path, dpi=300, bbox_inches="tight")