南京邮电大学:董振江
车联网的概念与定义
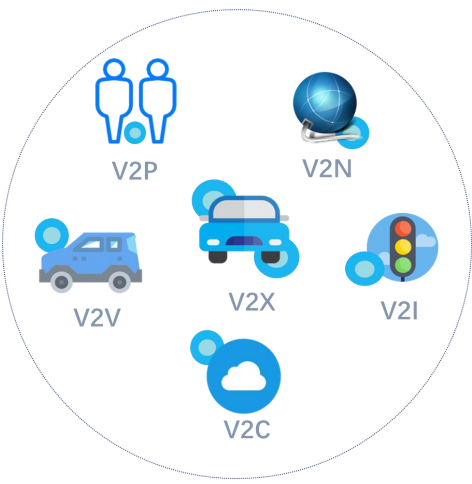
车联网,V2X (Vehicle to Everything)
-
内涵:车辆上的车载设备通过无线通信技术 ,对信息网络平台中的所有车辆动态信息进 行有效利用,在车辆运行中提供不同的功能 服务。
-
特征:车联网能够为车与车之间的间距提供 保障,降低车辆发生碰撞事故的几率;车联 网可以帮助车主实时导航,并通过与其它车 辆和网络系统的通信,提高交通运行效率。 --百度百科
-
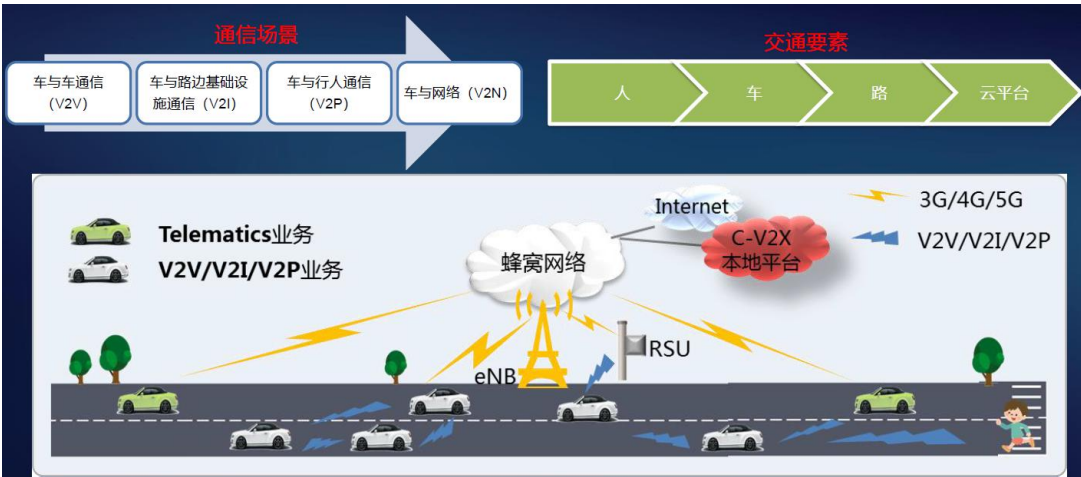
C-V2X(Cellular Vehicle to Everything) 是基于3G/4G/5G等蜂窝网通信技术演进形 成的车用无线通信技术。
C-V2X内涵
C-V2X中的C是指蜂窝(Cellular),它是基于3G/4G/5G等蜂窝网通信技术 演进形成的车用无线通信技术。
车联网(C-V2X)标准化及产业化研发
面向车联网业务场景,3GPP定义了LTE-V2X和NR-V2X两个阶段的标准化工作
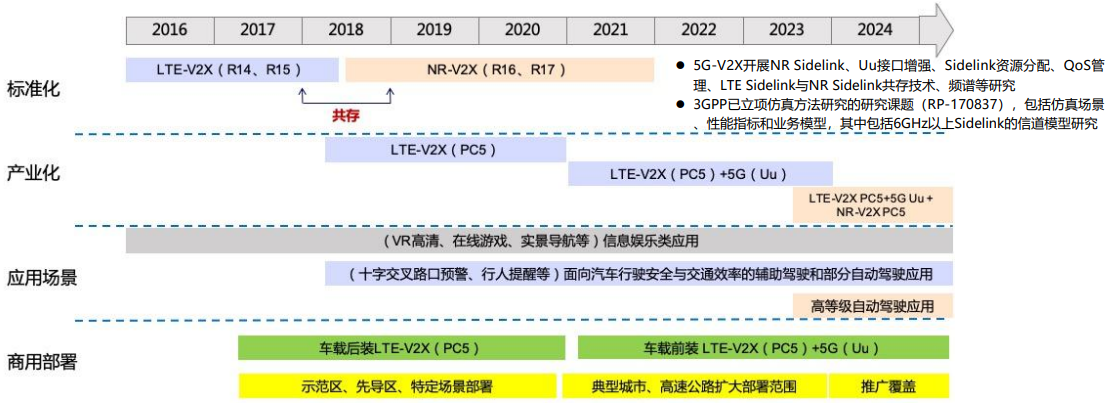
端到端的LTE-V2X标准体系,基本建设完成

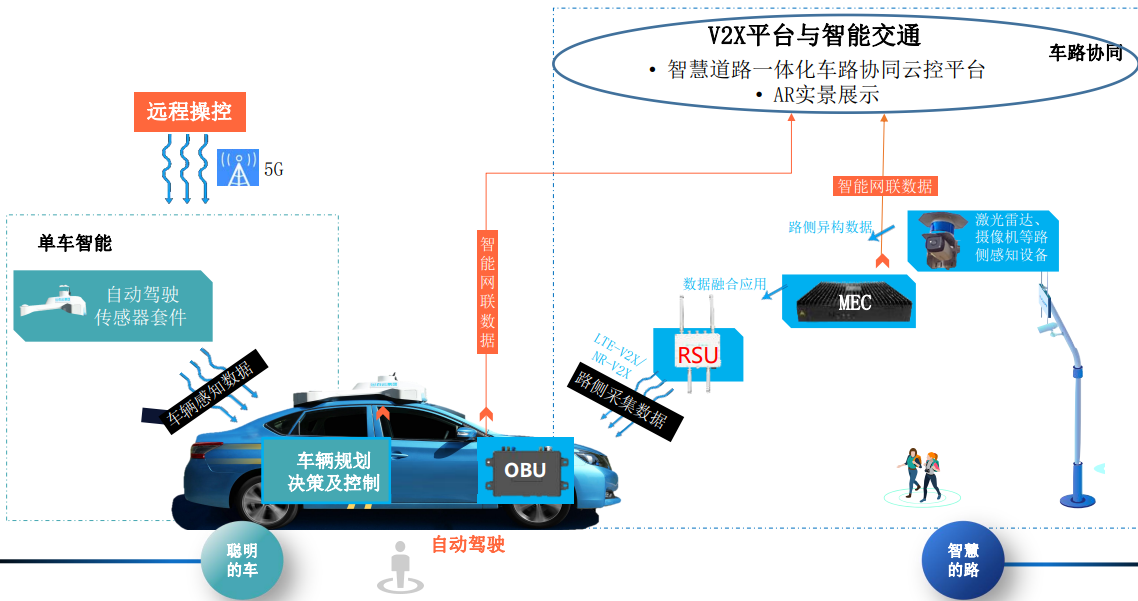
C-V2X车路协同解决方案架构图

车联网方案示意图
车联网中各产品定位与形态简析
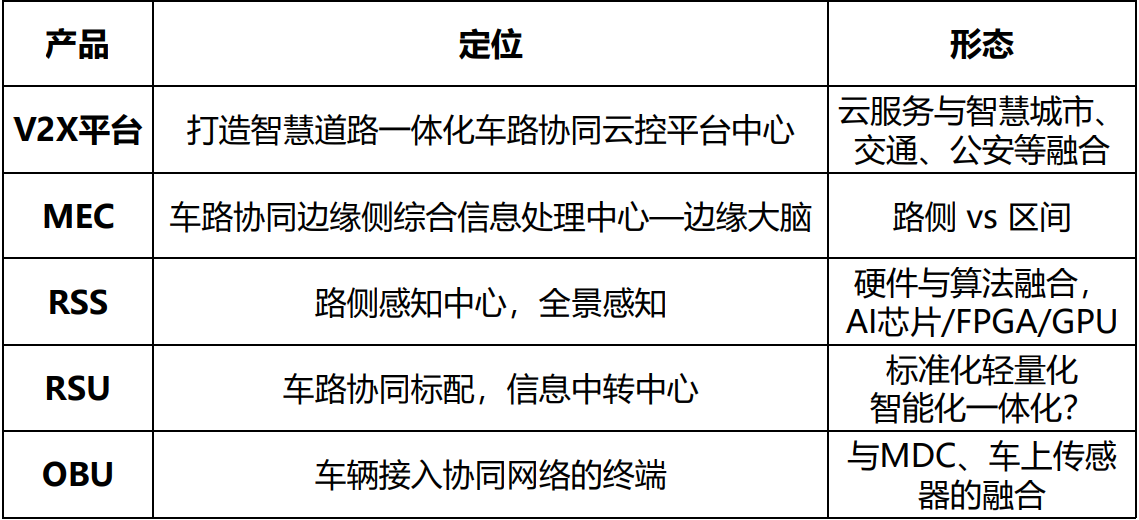
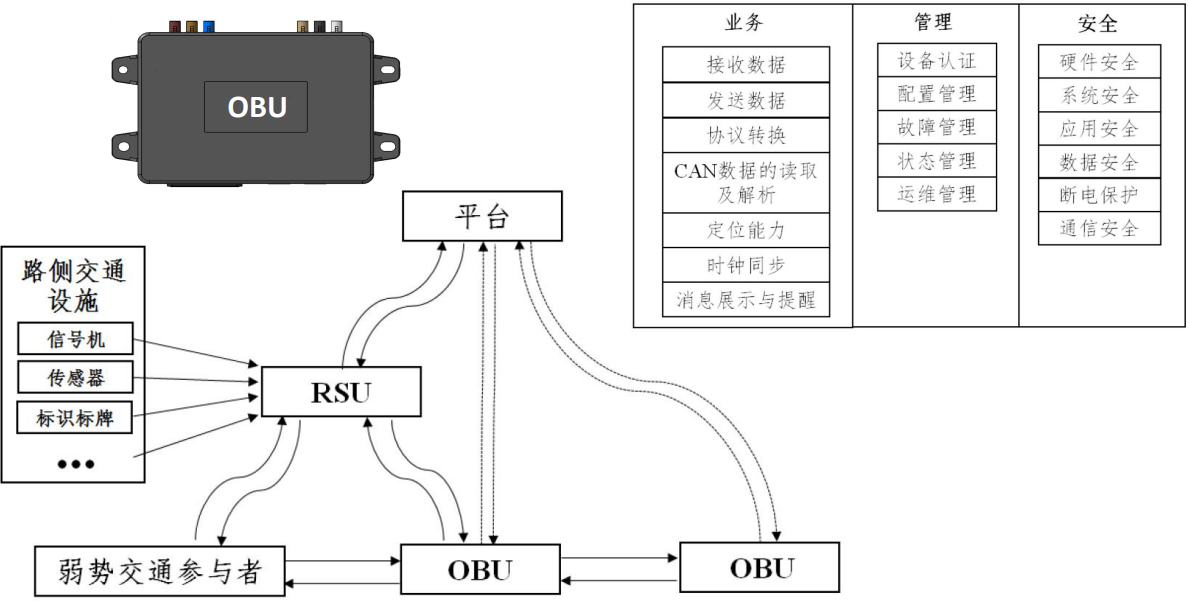
车载单元OBU
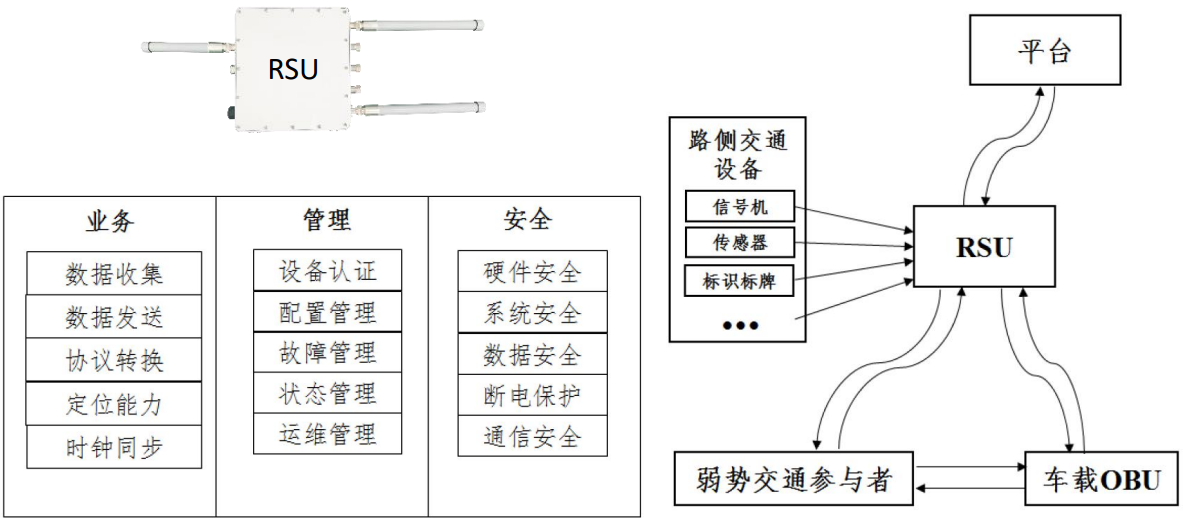
路侧单元RSU
路侧感知单元

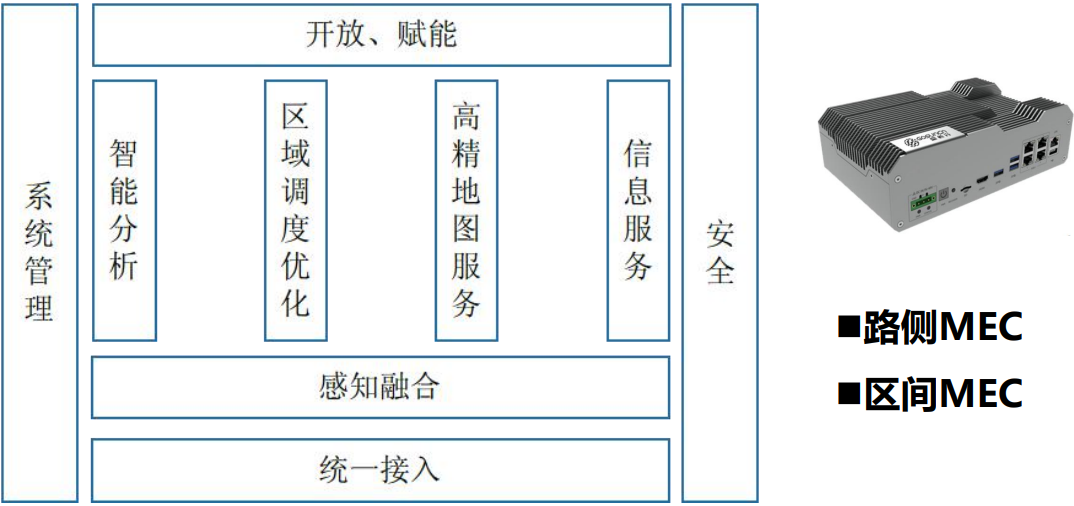
MEC是路侧融合综合信息处理中心
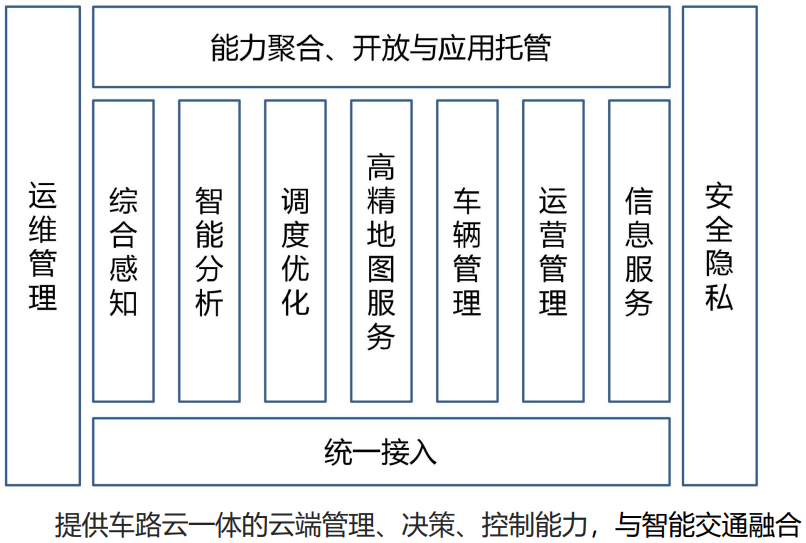
车联网云控平台
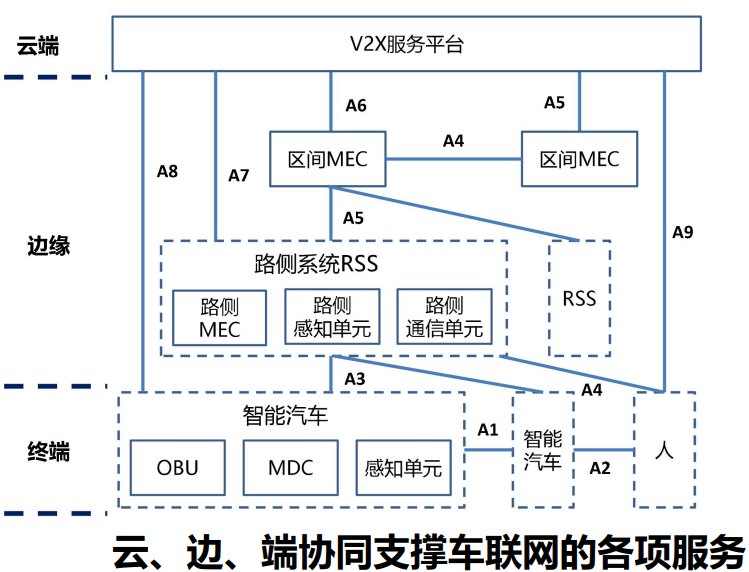
车联网的云边端架构
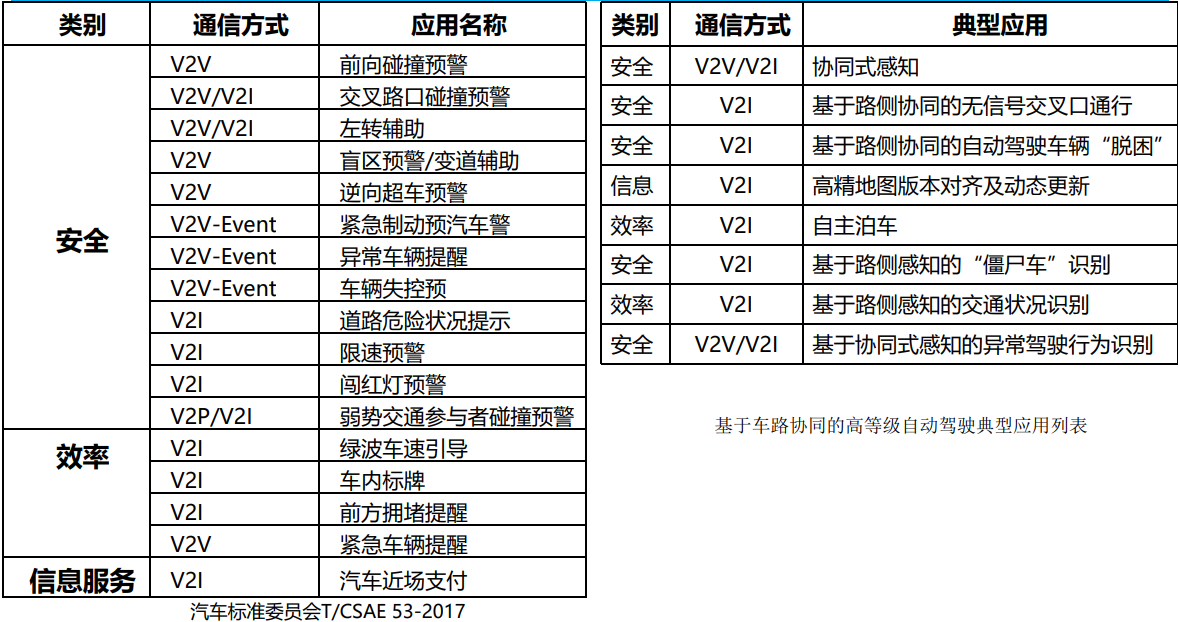
典型业务场景
限定场景布局将为自动驾驶技术落地提供更多可能性
当前自动驾驶在载货商用车领域有六大主流应用场景,包括:港口场景、物流园区、矿区场景、机场 场景、干线物流、末端物流。

典型车联网业务
信号灯下发应用场景

弱势行人检测预警应用场景

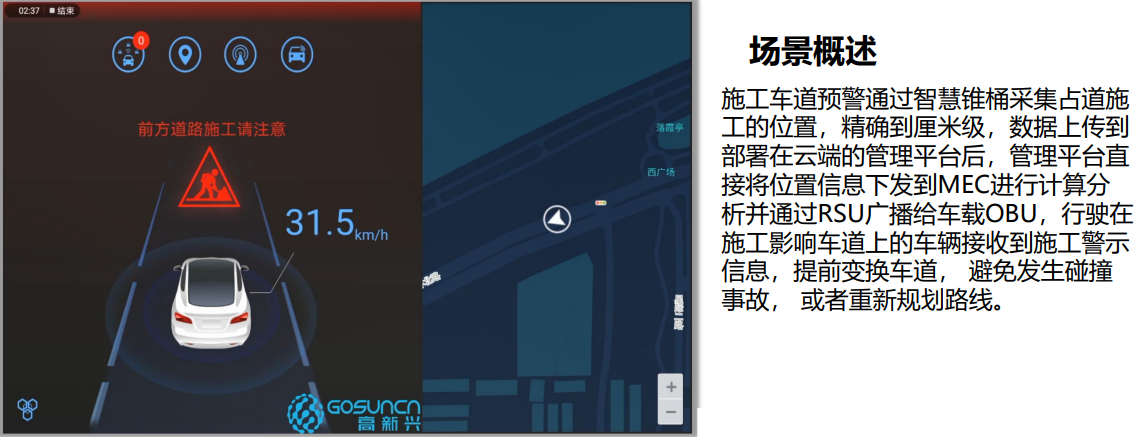
道路施工预警应用场景
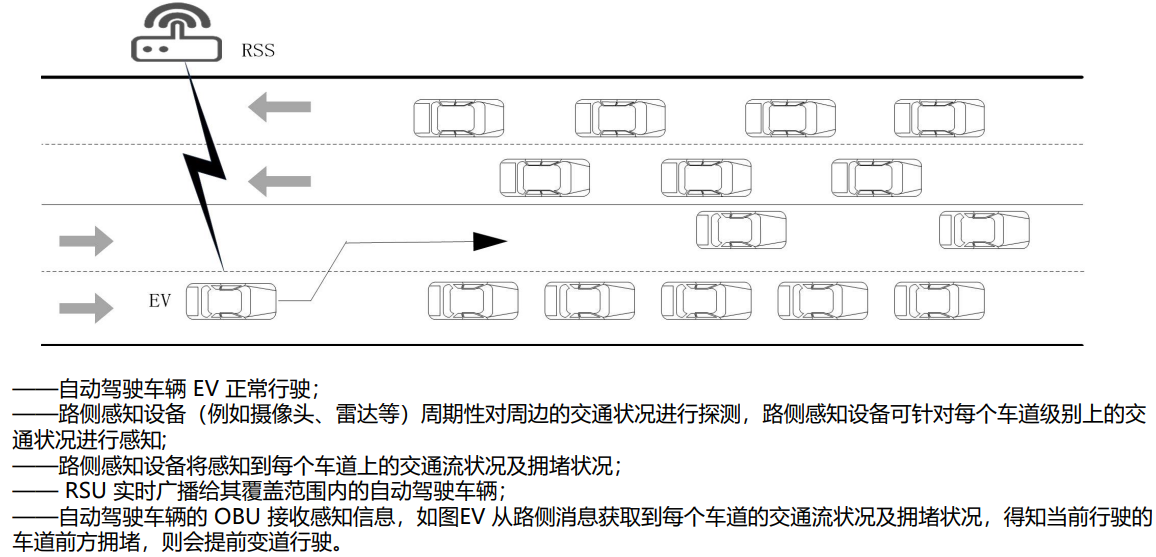
基于路侧感知的交通状况识别
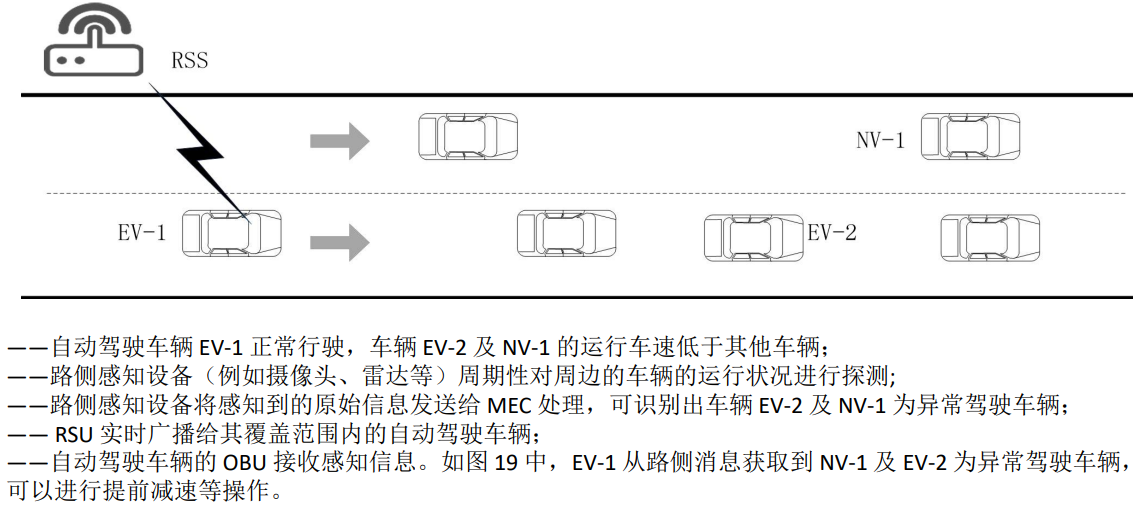
基于车路协同式感知的异常驾驶行为识别
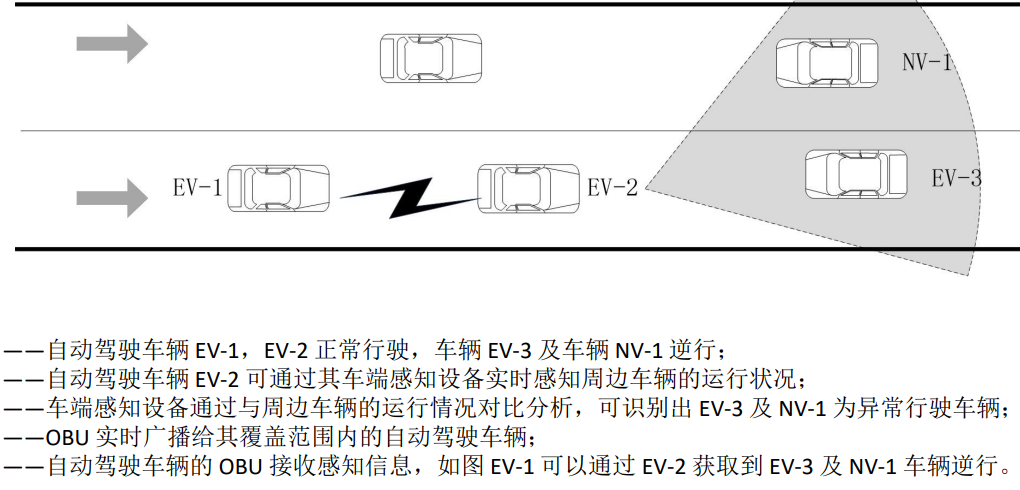
基于车车协同式感知的异常驾驶行为识别
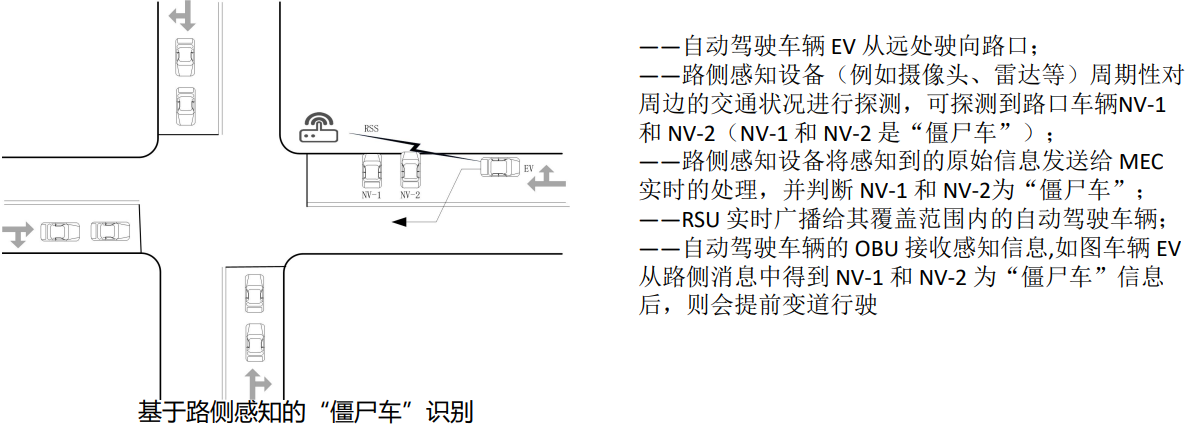
基于路侧感知的“僵尸车”识别
智慧公交解决方案

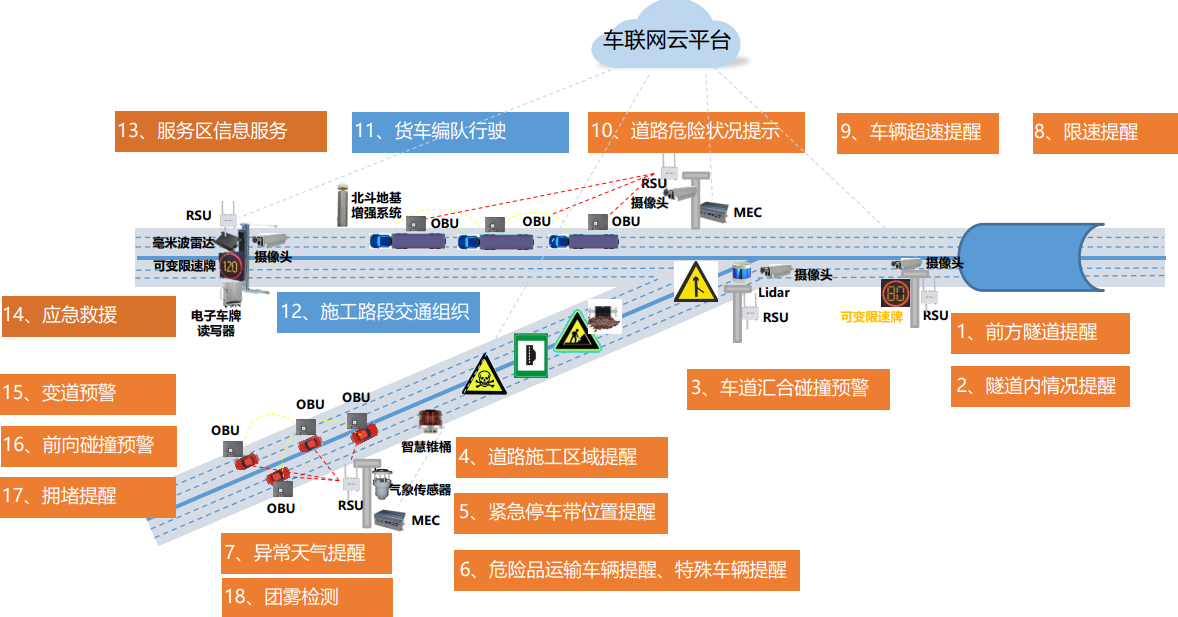
智慧高速公路解决方案
关键技术
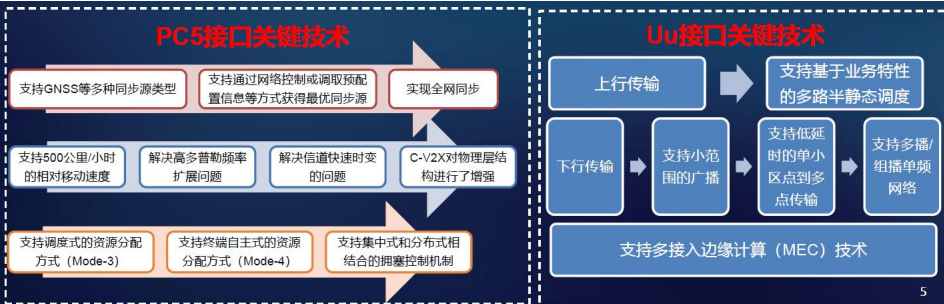
C-V2X通信关键技术
- C-V2X包含两种通信接口:车、人、路之间的短距离直接通信接口(PC5), 终端和基站之间的通信接口(Uu);
- C-V2X终端设备处于蜂窝网络覆盖内时,可在蜂窝网络下使用Uu接口;
- 是否有网络覆盖,均可采用PC5接口进行V2X通信
MEC业务实现技术
MEC是车联网边缘大脑,可实现全面设备接入、数据处理、存储分析、协议开放 、赋能服务等能力,将分散在各处的设备与系统串联、数据打通,综合处理。
“路侧-区域-中心”多层级架构已形成共识
路侧平台:负责路侧范围的原始数据汇聚处理 和应用服务,具有实时性高、精度高等特点 区域和中心平台:负责多源数据融合和区域的 开放服务,具有范围广、服务类型多等特点
路侧MEC建设是培育车联网生态的重要过程
前期聚焦发展路侧范围、功能性强的小平台, 分级、分步部署实施 逐步整合出协同统一的基础服务平台,促进实 现跨平台的互联互通和开放服务
视觉感知算法技术

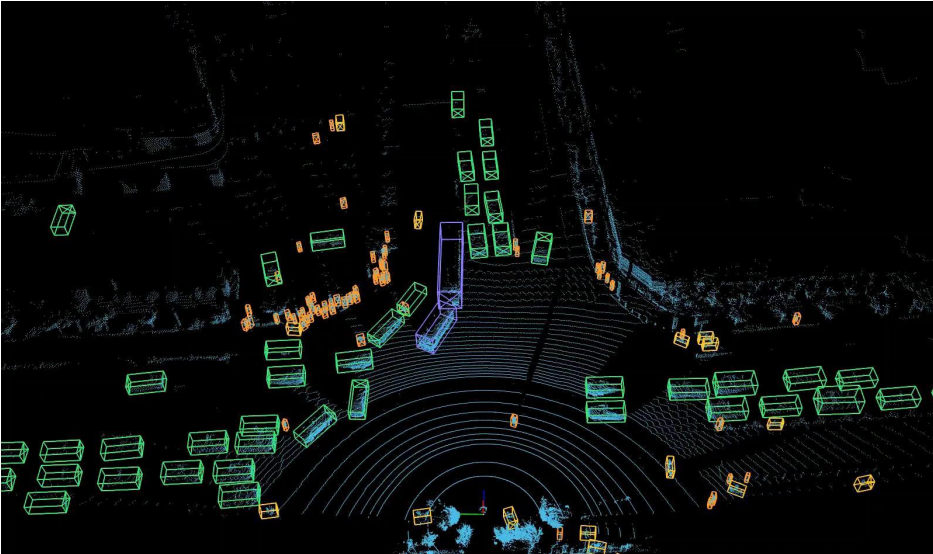
雷达感知算法技术

-
人车物目标的捡测、分类、跟踪等;
-
目标的速度、角速度与位置感知
-
n异常事件的检测、识别与告警
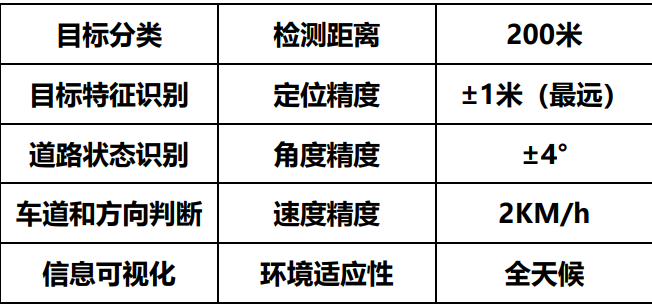
雷达实际检测效果
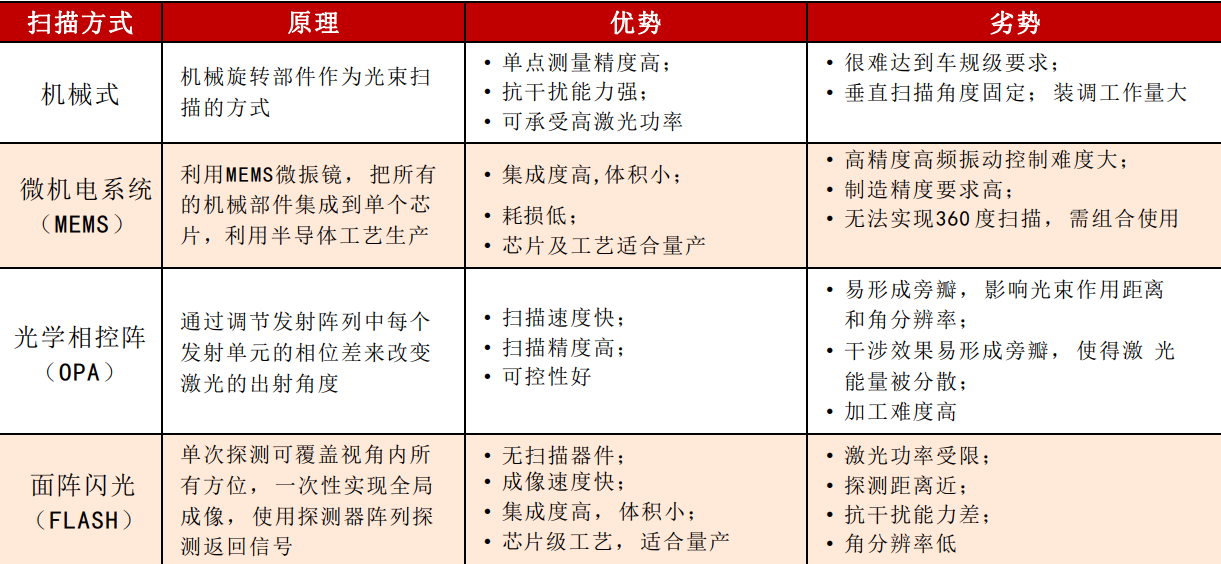
激光雷达分类
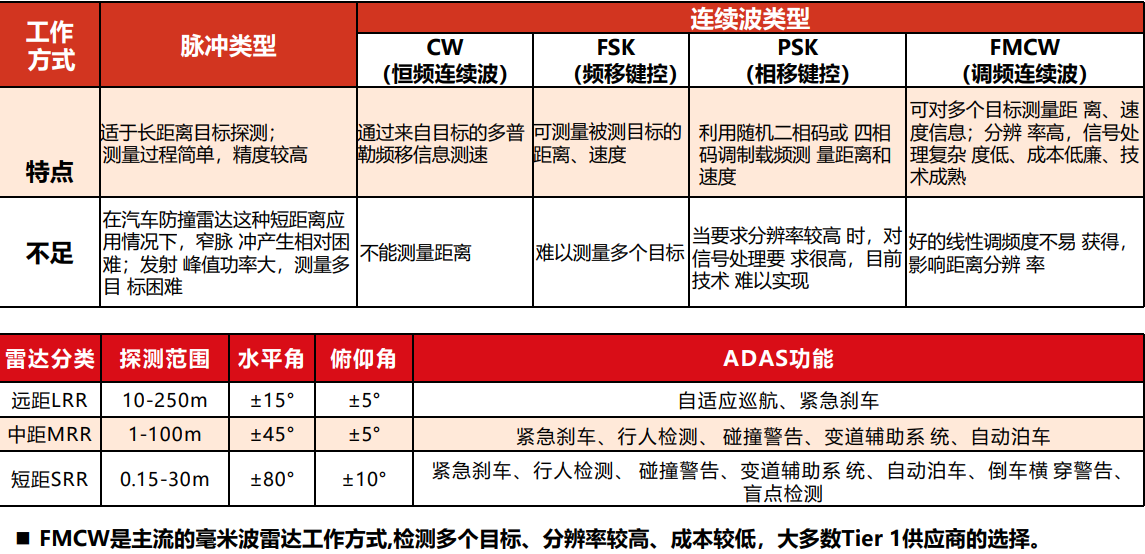
毫米波雷达分类
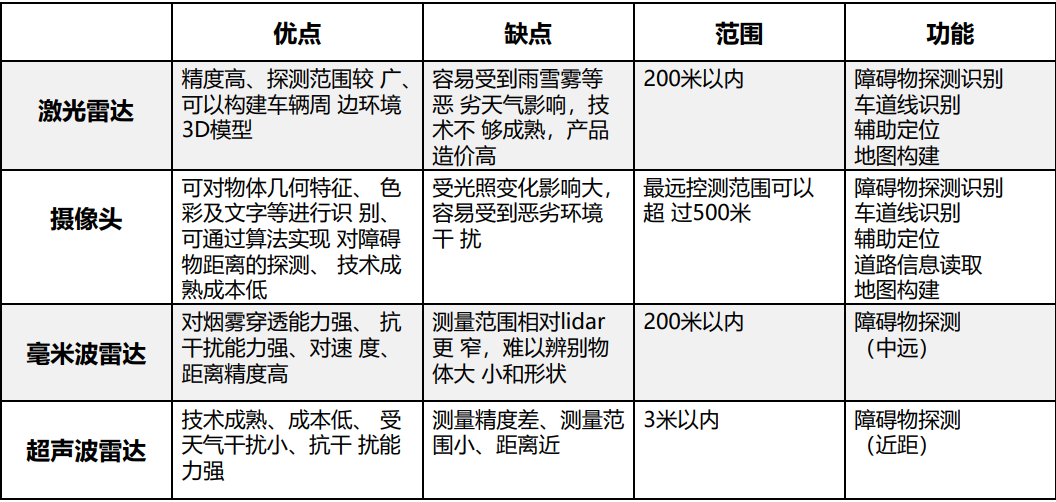
路侧主要传感器优劣势比较
视频与雷达融合技术
- 激光雷达 VS 毫米波雷达
- 雷达与视觉深度融合。静止车辆检测、低照度环境、异常天气
- 坐标对准技术
- 检测、跟踪技术
- 分类识别技术
高精度地图技术
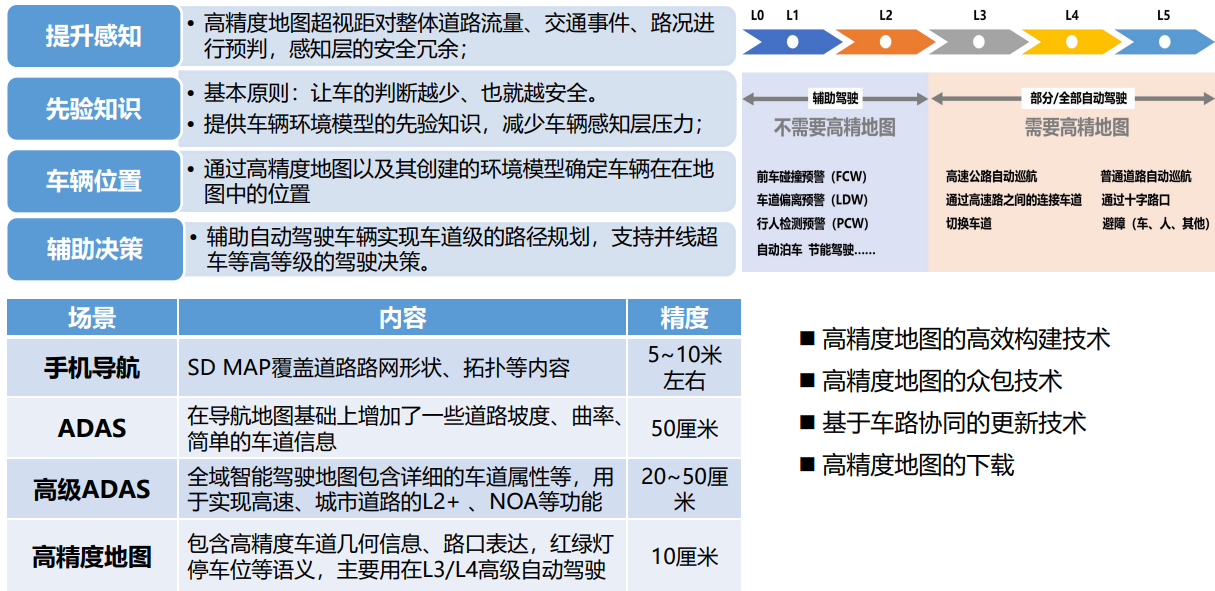
高精地图效果示意图

车联网高精度定位技术

高精定位存在的问题
- 可靠的车道级定位成本。高精地图+GNSS+定位增强服务RTK/PPP 等)+ 相机+IMU (惯性测量单元通常由3个加速度计和3个陀螺仪组成)+车辆 CAN 信号 n融合定位的可靠性。如何在全国范围内验证其可靠性是另一个难题。
- 功能安全和完好性方面,尚未解决的核心问题。
- 其他问题
- 高精地图还没有形成统一的行业规范。
- 高精地图的安全性验证还没有行业统一的共识。
- 高精地图需要高覆盖度和高频率更新,采集制作成本与商业模式还不成熟。
- 国内高精地图的生产和发布过程受到严格的测绘地理信息法律法规管理,与自动驾驶需求 不能完全对应满足。
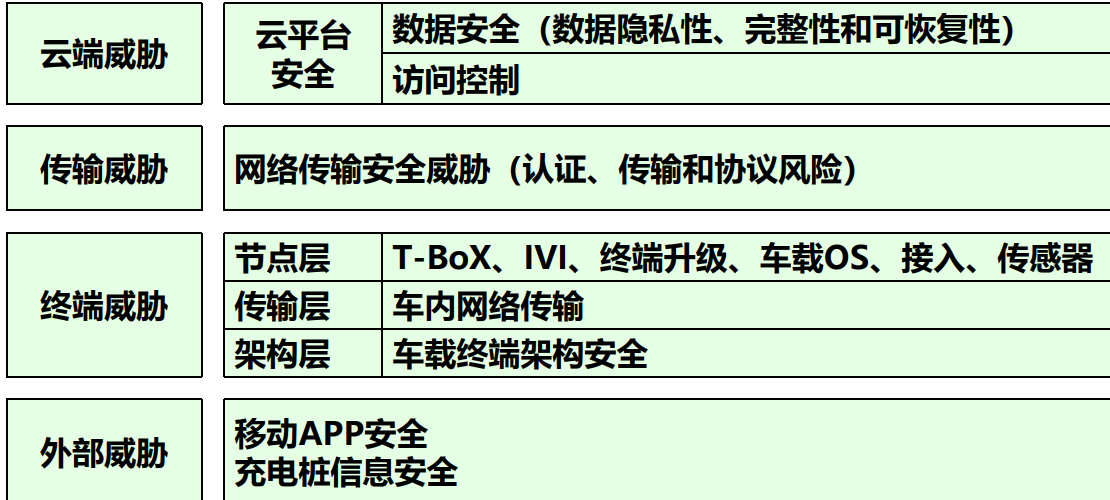
车联网安全技术