用定向滤波器检测边缘
放大图像中的高频成分,再用高通滤波器进行边缘检测
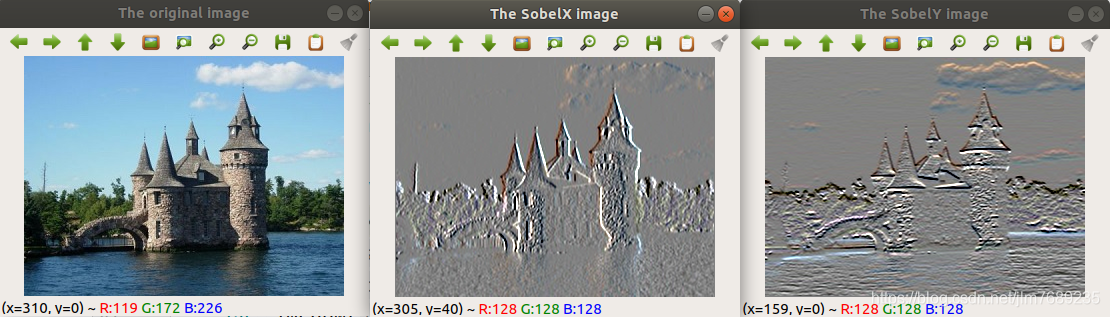
Sobel滤波器
Sobel滤波器,只对垂直和水平方向的图像频率器作用(具体方向取决于滤波器选用的内核),所以被认为是一种定向滤波器。
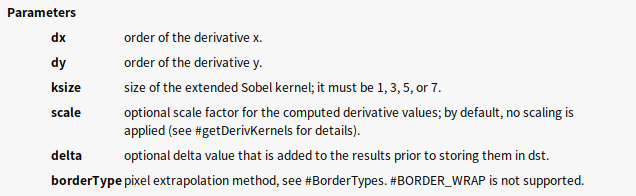
void Sobel(InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize = 3, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT)
- 水平方向调用方法
cv::Sobel(image, // 输入矩阵
SobelX, // 输出矩阵
CV_8U, // 图像类型
1, 0, // 内核规格 这里主要是水平方向和垂直方向的控制
3, // 正方形内核的尺寸
0.4, 128); // 比例和偏移量
- 垂直方向调用方法
cv::Sobel(image, // 输入矩阵
SobelY, // 输出矩阵
CV_8U, // 图像类型
0, 1,// 内核规格
3, // 正方形内核的尺寸
0.4, 128); // 比例和偏移量
示例程序
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace std;
int main(int argc, char** argv) {
if( argc != 2)
{
cerr << "please enter the right numbers of images" << endl;
return -1;
}
cv::Mat image = cv::imread(argv[1]);
if (image.empty())
{
cerr << "don`t get the data of the argv[1]" << endl;
return -1;
}
cv::imshow("The original image", image);
cv::waitKey(0);
cv::Mat SobelX;
cv::Sobel(image, // 输入矩阵
SobelX, // 输出矩阵
CV_8U, // 图像类型
1, 0, // 内核规格
3, // 正方形内核的尺寸
0.4, 128); // 比例和偏移量
cv::imshow("The SobelX image", SobelX);
cv::waitKey(0);
cv::Mat SobelY;
cv::Sobel(image, // 输入矩阵
SobelY, // 输出矩阵
CV_8U, // 图像类型
0, 1,// 内核规格
3, // 正方形内核的尺寸
0.4, 128); // 比例和偏移量
cv::imshow("The SobelY image", SobelY);
cv::waitKey(0);
return 0;
}
示例程序
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace std;
int main(int argc, char** argv) {
if( argc != 2)
{
cerr << "please enter the right numbers of images" << endl;
return -1;
}
cv::Mat image = cv::imread(argv[1]);
if (image.empty())
{
cerr << "don`t get the data of the argv[1]" << endl;
return -1;
}
cv::imshow("The original image", image);
cv::waitKey(0);
cv::Mat SobelX;
cv::Sobel(image, SobelX, CV_16S, 1, 0);
cv::Mat SobelY;
cv::Sobel(image, SobelY, CV_16S, 0, 1);
cv::Mat sobel;
sobel = abs(SobelX) + abs(SobelY);
double sobmin, sobmax;
cv::minMaxLoc(sobel, &sobmin, &sobmax);
cv::Mat sobelImage;
sobel.convertTo(sobelImage, CV_8U, -255./sobmax, 255);
cv::imshow("The Processed image", sobelImage);
cv::waitKey(0);
cv::Mat sobelThresholded;
cv::threshold(sobelImage, sobelThresholded, 150, 255, cv::THRESH_BINARY);
cv::imshow("sobelThresholded image", sobelThresholded);
cv::waitKey(0);
return 0;
}

具体请看参考博客
https://blog.csdn.net/u012566751/article/details/77046445