最优化的相关条件
一. 局部极值点的必要条件
既然在前一节中我们对于局部(全局)极值点进行了讨论,那么我们也想要知道,如果一个点是极值点,那么它需要满足什么条件?
1. 局部极小点的必要条件
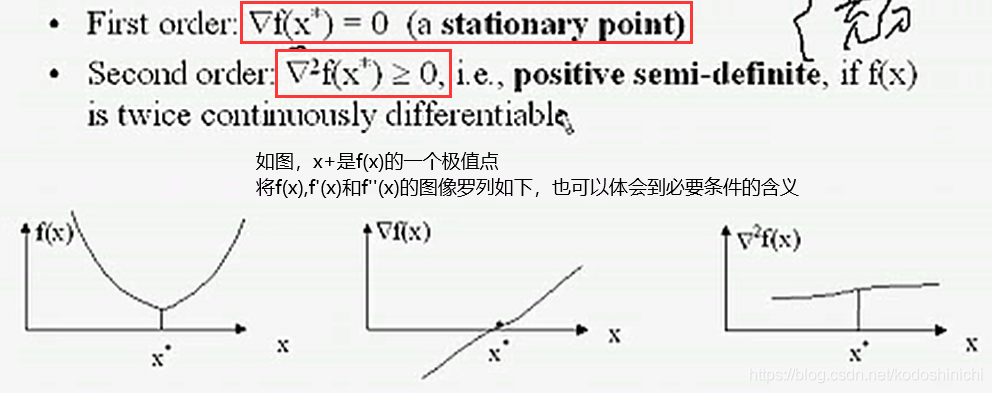
若点x0是函数f(x)的局部极小值点,则有:
- x0是f(x)的驻点——(f(x)在x0处的一阶导数为0)
- f(x)在x0处的Hessian矩阵H(x0)是半正定的
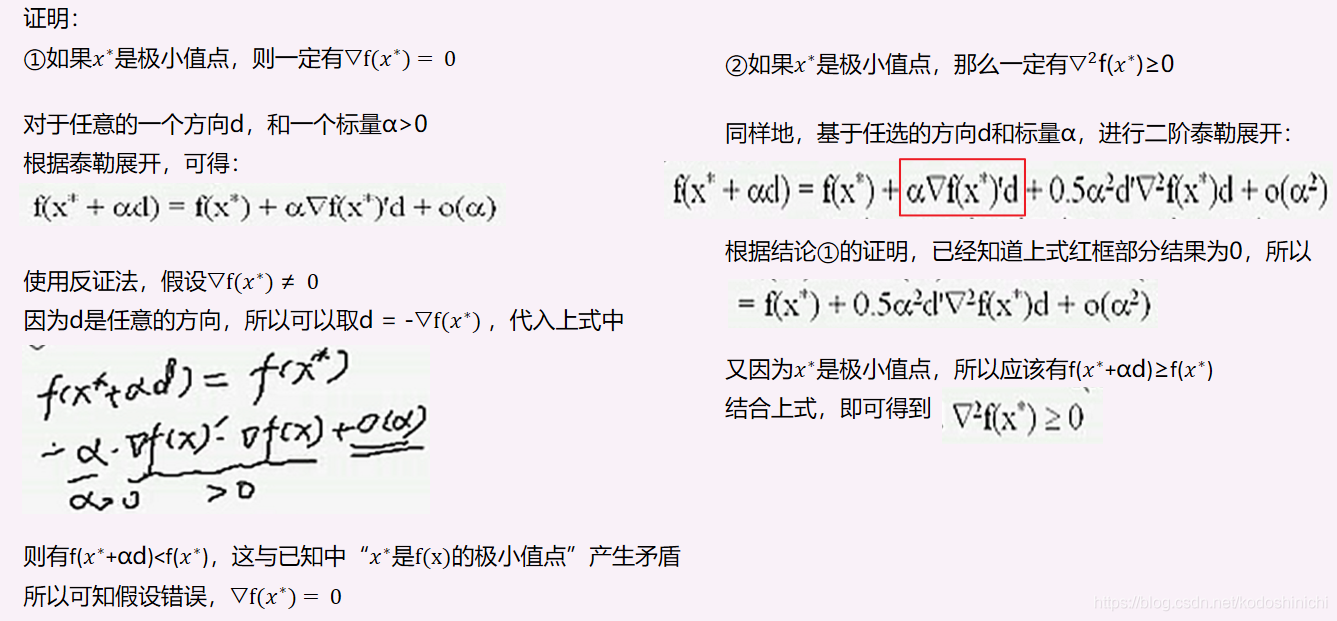
2. 证明
【自我小结】
- 有关极值的相关证明经常用到极值的定义和泰勒展开
- 反证法也是经常用到的证明思路
- 为了构造出上面所需的定义和泰勒展开式,往往会取某个点的邻域进行相应的演算。
3. 局部极大点的必要条件
前面虽然都是在以局部极小点为例进行探讨,但是我们可以很容易地将结论迁移类比到局部极大值上面。
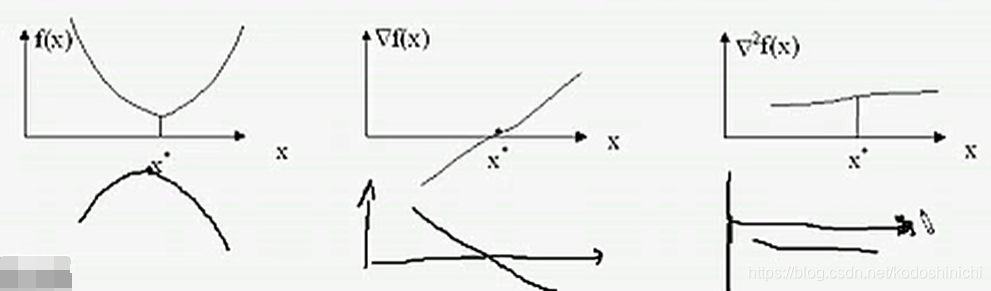
根据上图我们可知,如果一个点x0是f(x)的局部极大值点,则有:
- f(x)在x0处的一阶导数值为0
- f(x)在x0的Hessian矩阵是负半定的
二. 局部极值点的充分条件
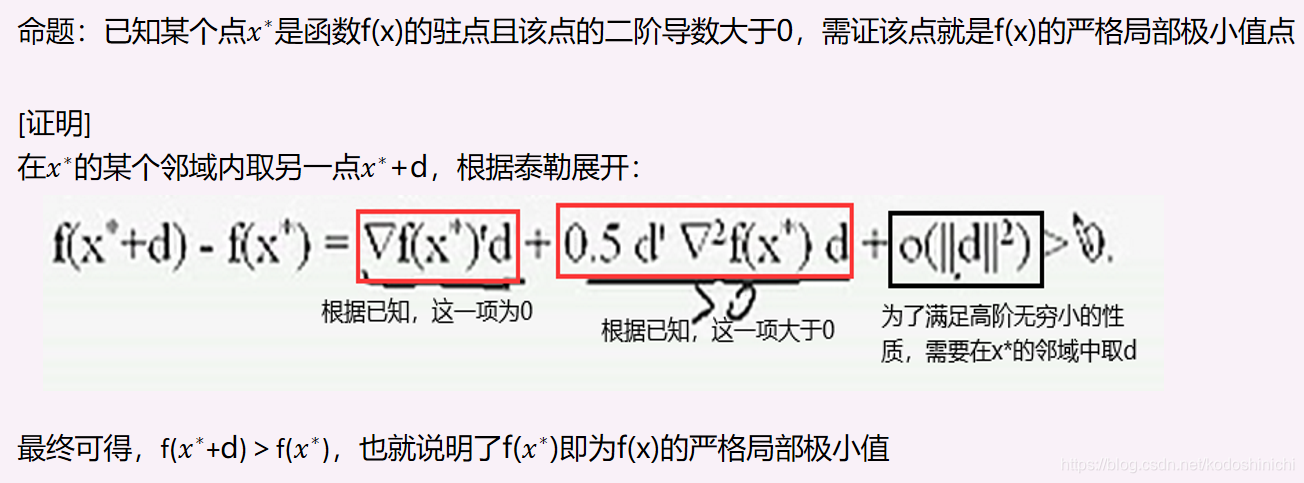
1. 局部极小值的充分条件

若函数f(x)上的某一点x0满足:
- x0是f(x)的驻点——(f(x)在x0处的一阶导数为0)
- f(x)在x0处的Hessian矩阵H(x0)是正定的
则可得到,x0就是f(x)的严格的局部极小值点(<)
2. 证明
3. 注意事项
①对照充分条件和必要条件,可知充分条件比必要条件更加严苛(必要条件涵盖了充分条件)
②充分条件的适用范围更窄,函数需要定义在开集上,且函数需要二阶可微
在实际问题中,函数往往是定义在闭集上,而且最优点很可能就出现在端点上。
这个时候,我们可以先利用充分条件找到该闭集对应的开集中的最优点,再和端点上的函数值进行比较,从而确定整个闭集上的最优点。
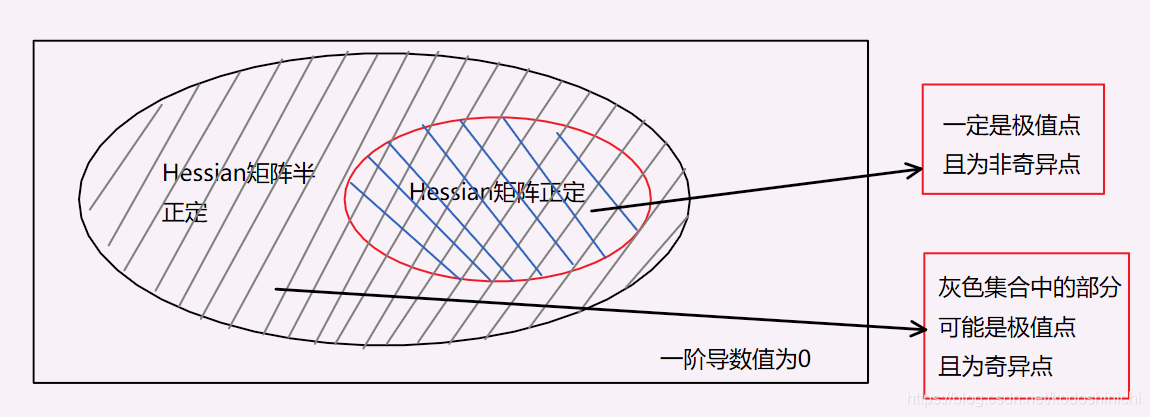
③用充分条件可以直接找到极值点中的所有非奇异点,奇异点则较难寻找
注意分辨“充分条件和“必要条件”的关系
- 满足了充分条件的点一定是非奇异极值点,不满足充分条件的点不一定不是极值点
- 所有极值点都必须满足必要条件,满足了必要条件不一定就是极值点
- 满足了必要条件,但不满足充分条件的那些极值点就称为奇异点
④对于一个定义在开集X上的可微凸函数f(x)而言,▽f(x*) = 0↔点x*是f(x)的全局极小值点。
【简要证明】
根据上一篇博文《【最优化】最优化理论的基本概念》中的《可微函数的凸性三定理》的定理一:
我们可以任取一个x∈X,则有f(x)-f(x*)≥▽f(x*)T·(x-x*);
又因为根据题意,▽f(x*)T = 0,所以可得f(x)-f(x*)≥0
从而证得x*就是f(x)的全局极小值点。
【例】求解给定函数的局部极值点
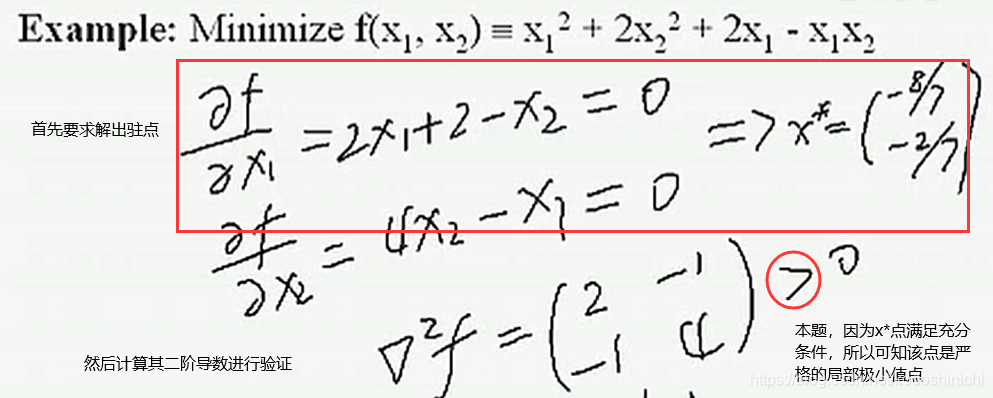
关于极值点求解的题型要注意:
- 求解出驻点之后,一定要用二阶导进行验证,才能明确是不是极小(大)值点
- 只能得出该点满足必要条件,则不能下结论说该点是局部极值点
- 不同函数在某点的一阶导和二阶导处具有相同的性质,这并不意味着该点在两个函数中是相同性质的点,可以通过计算更高阶导数进行分析
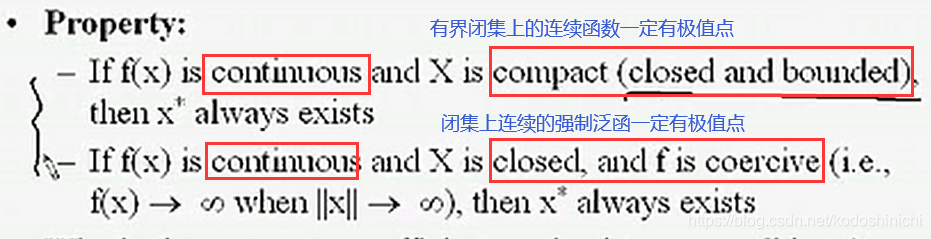
三. 局部极值点的存在条件
不是所有的函数都存在极值点:
1. 极值点的存在条件
总的来说,我们只需要记住在一个给定的有界区间内求解,一般都是有极值点的

2. 讨论极值点的各类条件的原因
本节我们讨论了极值点的充分、必要、充分必要及存在性条件。
- 帮助理解极值求解过程
- 当条件满足时,我们可以适时地终止一个迭代算法
- 可以帮助优化算法