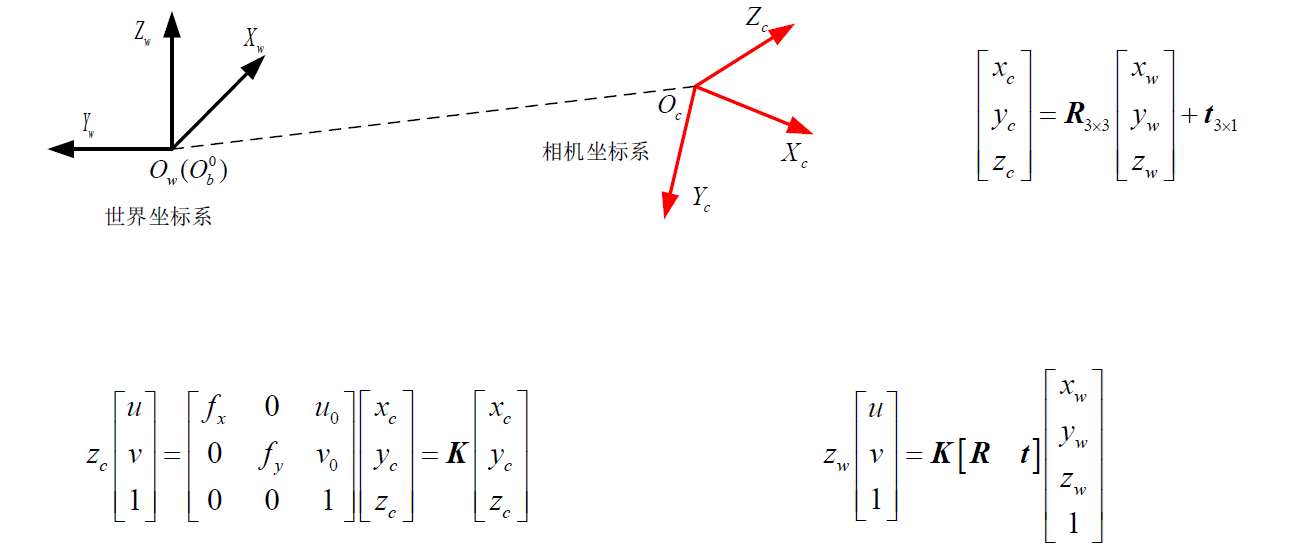
一.单目相机模型
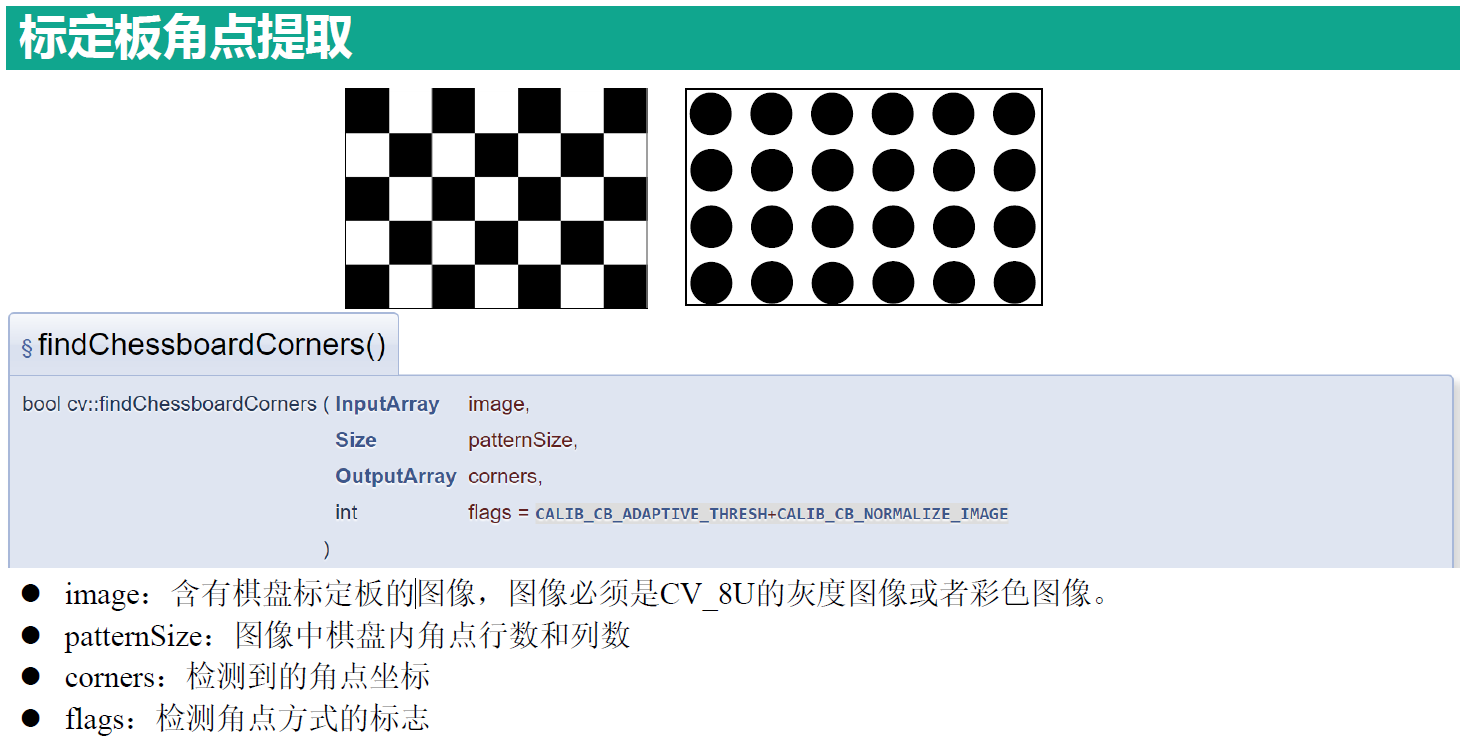
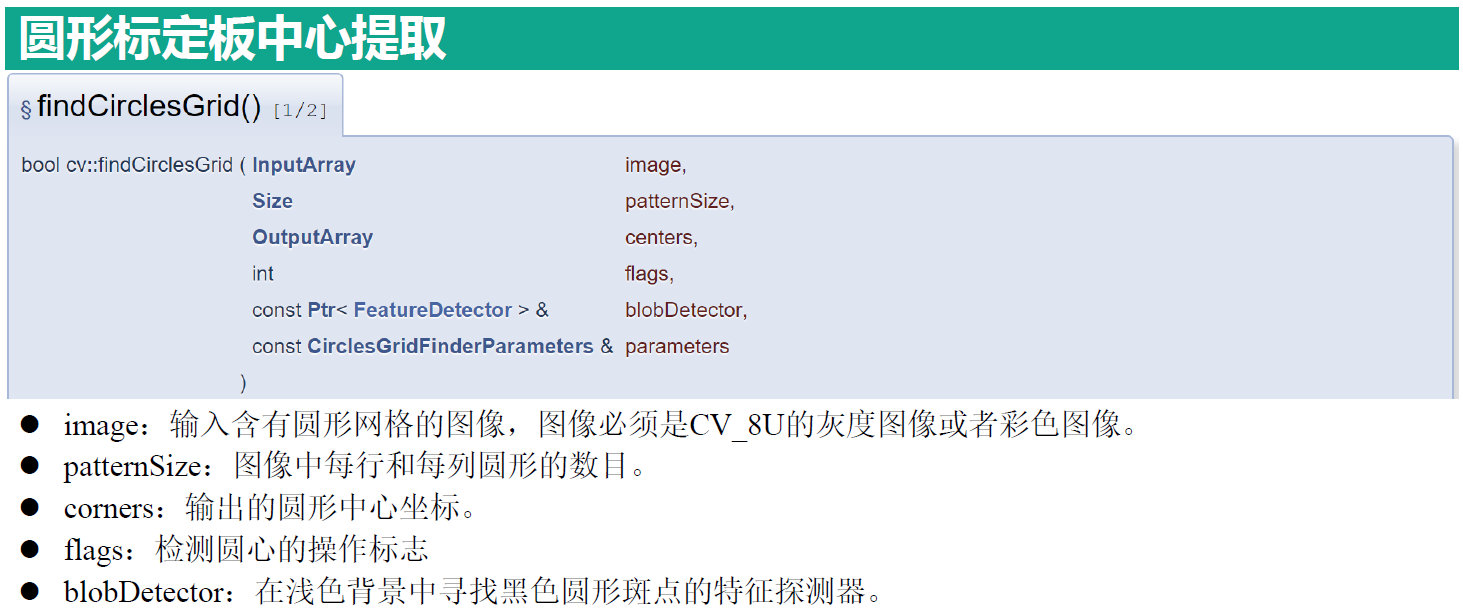
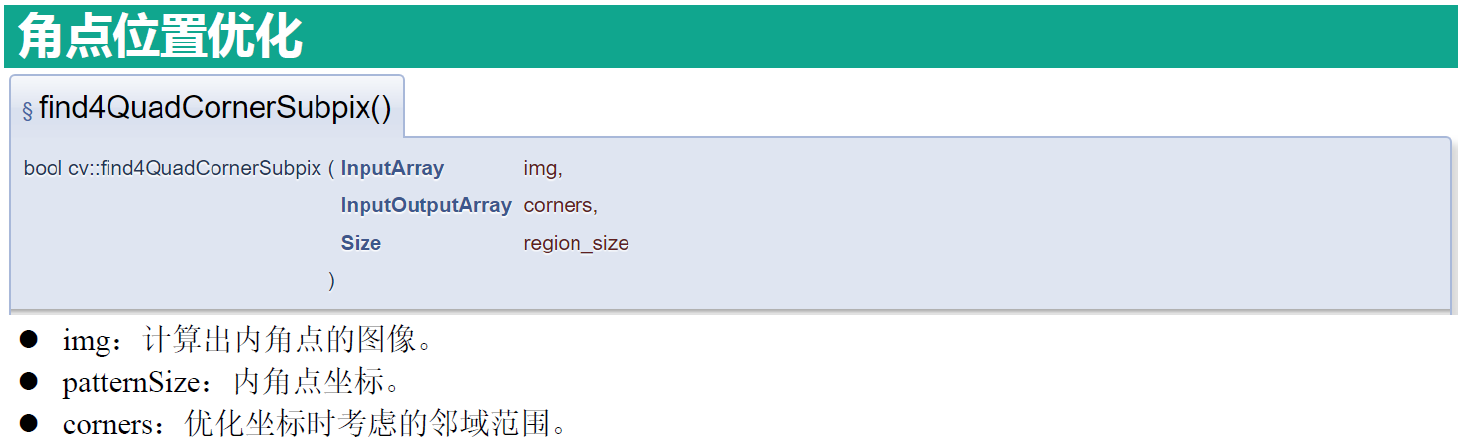
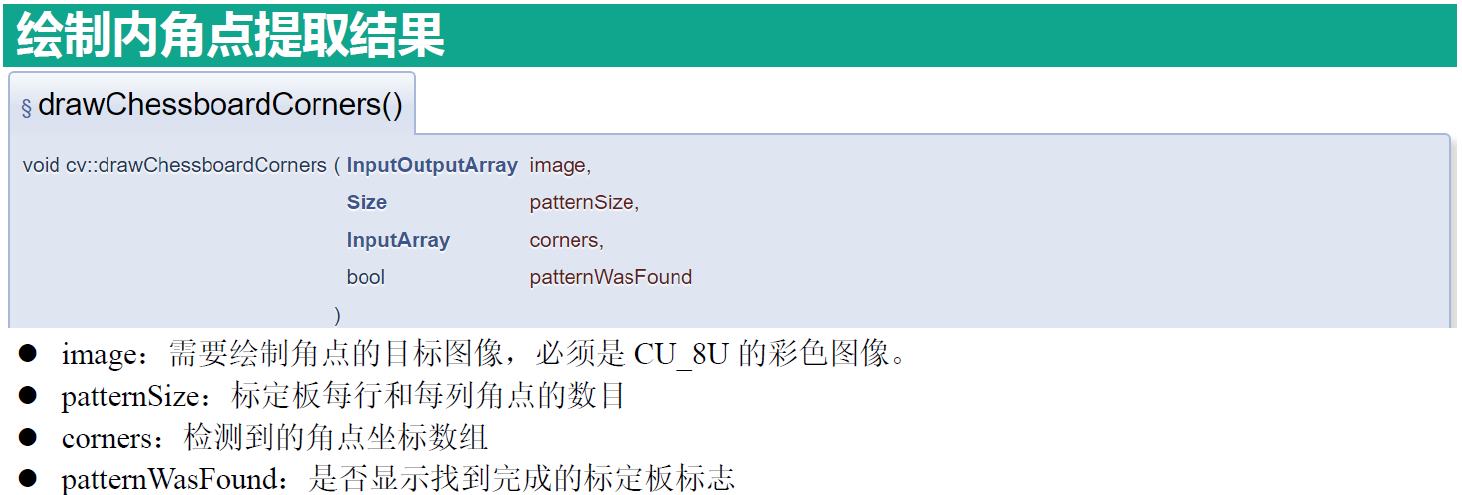
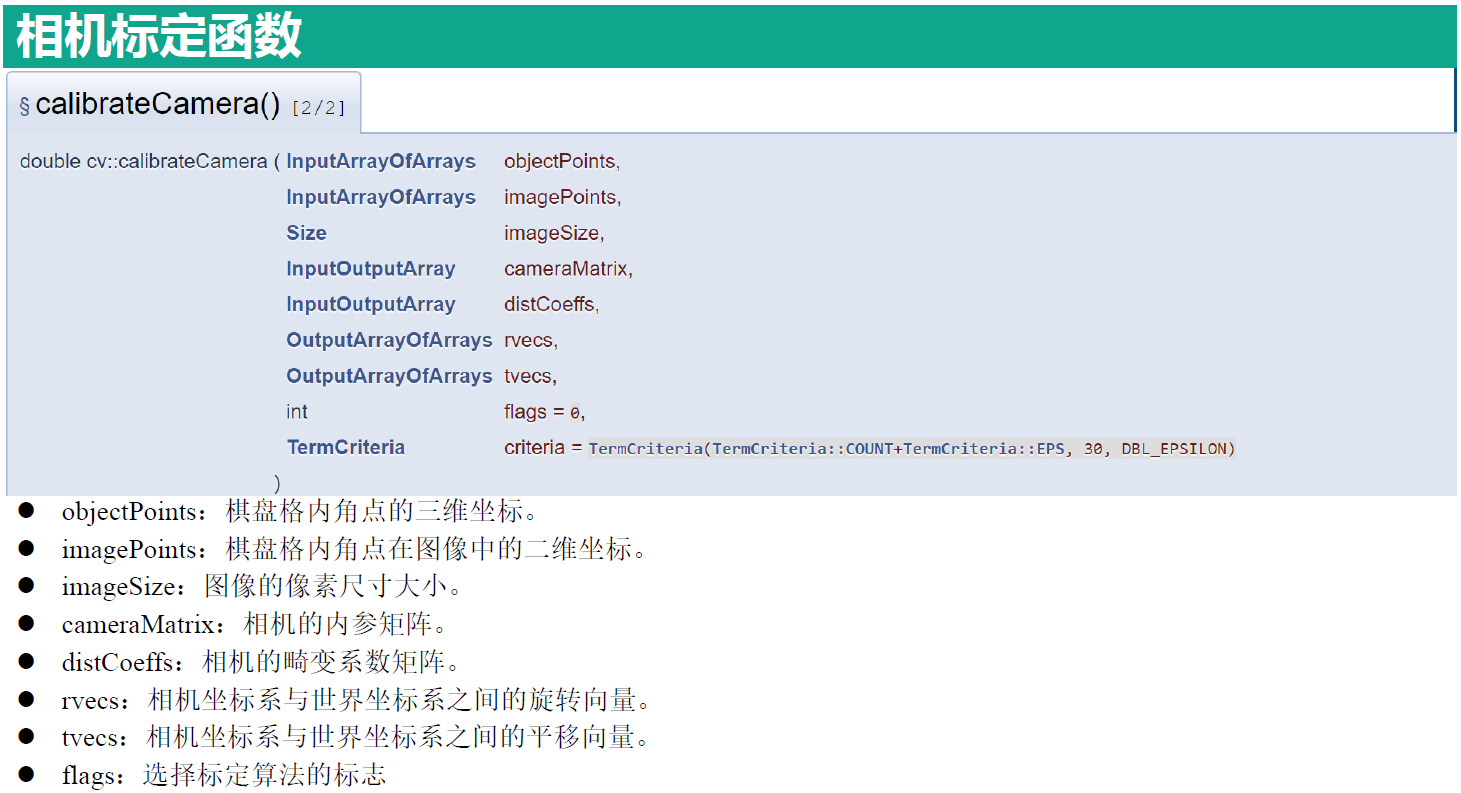
二.OpenCV提供的相关函数
三.标定
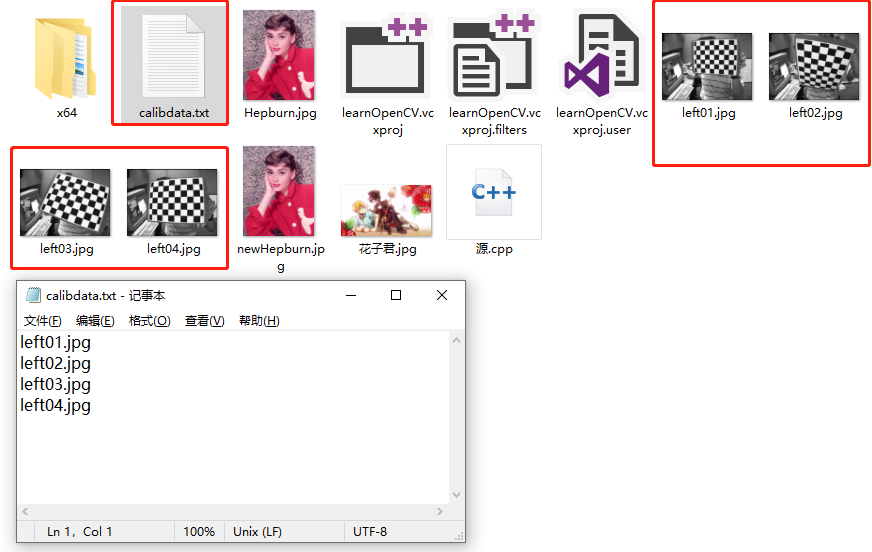
准备文件:


运行(GIF动图)
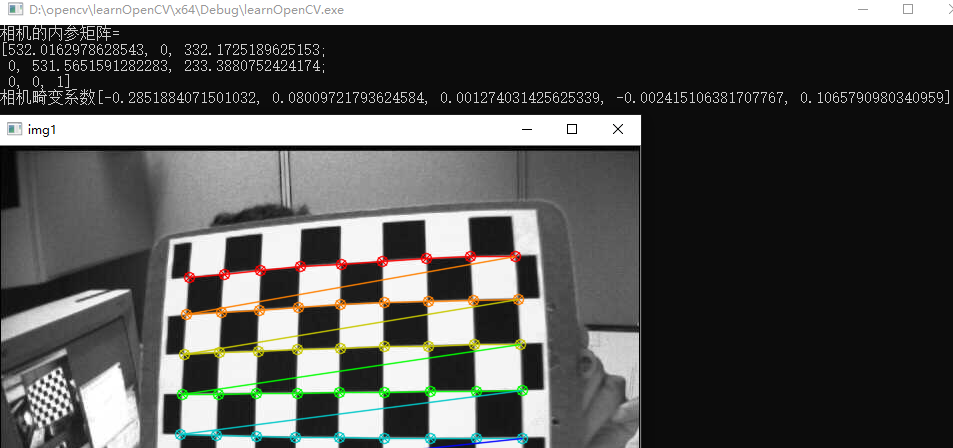
最终标定结果:
附代码:
#include <opencv2\opencv.hpp>
#include <fstream>
#include <iostream>
#include <vector>
using namespace std;
using namespace cv;
int main()
{
//读取所有图像
vector<Mat> imgs;
string imageName;
ifstream fin("calibdata.txt");
while (getline(fin, imageName))
{
Mat img = imread(imageName);
imgs.push_back(img);
}
Size board_size = Size(9, 6); //方格标定板内角点数目(行,列)
vector<vector<Point2f>> imgsPoints;
for (int i = 0; i < imgs.size(); i++)
{
Mat img1 = imgs[i];
Mat gray1;
cvtColor(img1, gray1, COLOR_BGR2GRAY);
vector<Point2f> img1_points;
findChessboardCorners(gray1, board_size, img1_points); //计算方格标定板角点
find4QuadCornerSubpix(gray1, img1_points, Size(5, 5)); //细化方格标定板角点坐标
bool pattern = true;
drawChessboardCorners(img1,board_size,img1_points,pattern);
imshow("img1",img1);
waitKey(0);
imgsPoints.push_back(img1_points);
}
//生成棋盘格每个内角点的空间三维坐标
Size squareSize = Size(10, 10); //棋盘格每个方格的真实尺寸
vector<vector<Point3f>> objectPoints;
for (int i = 0; i < imgsPoints.size(); i++)
{
vector<Point3f> tempPointSet;
for (int j = 0; j < board_size.height; j++)
{
for (int k = 0; k < board_size.width; k++)
{
Point3f realPoint;
// 假设标定板为世界坐标系的z平面,即z=0
realPoint.x = j*squareSize.width;
realPoint.y = k*squareSize.height;
realPoint.z = 0;
tempPointSet.push_back(realPoint);
}
}
objectPoints.push_back(tempPointSet);
}
/* 初始化每幅图像中的角点数量,假定每幅图像中都可以看到完整的标定板 */
vector<int> point_number;
for (int i = 0; i<imgsPoints.size(); i++)
{
point_number.push_back(board_size.width*board_size.height);
}
//图像尺寸
Size imageSize;
imageSize.width = imgs[0].cols;
imageSize.height = imgs[0].rows;
Mat cameraMatrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); //摄像机内参数矩阵
Mat distCoeffs = Mat(1, 5, CV_32FC1, Scalar::all(0)); //摄像机的5个畸变系数:k1,k2,p1,p2,k3
vector<Mat> rvecs; //每幅图像的旋转向量
vector<Mat> tvecs; //每张图像的平移量
calibrateCamera(objectPoints, imgsPoints, imageSize, cameraMatrix, distCoeffs, rvecs, tvecs, 0);
cout << "相机的内参矩阵=" << endl << cameraMatrix << endl;
cout << "相机畸变系数" << distCoeffs << endl;
waitKey(0);
return 0;
}