一.标定说明——《OpenCV4快速入门》



二.标定
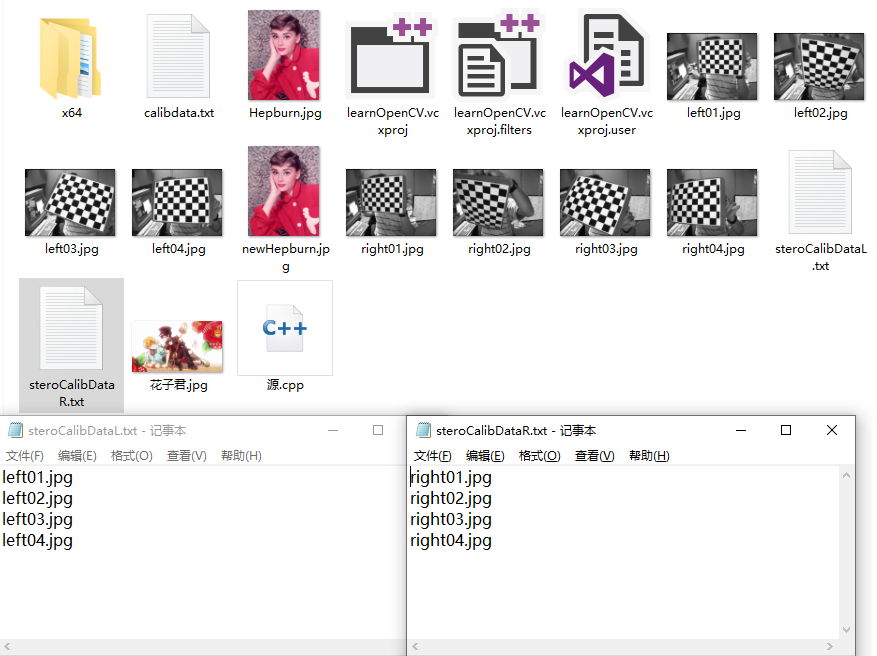
文件准备:
运行结果:

《OpenCV4快速入门》中的运行结果:

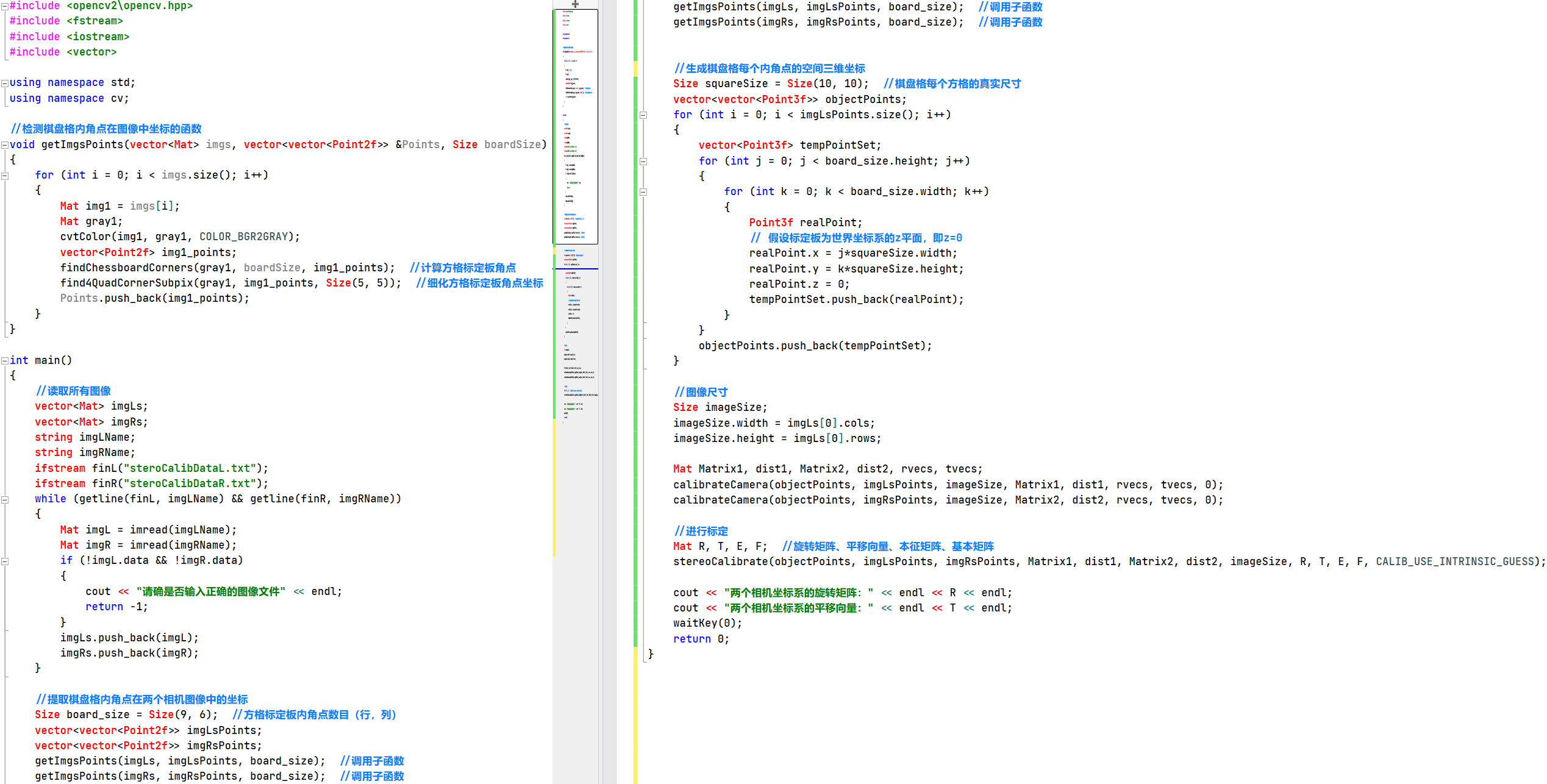
附上例代码:
#include <opencv2\opencv.hpp>
#include <fstream>
#include <iostream>
#include <vector>
using namespace std;
using namespace cv;
//检测棋盘格内角点在图像中坐标的函数
void getImgsPoints(vector<Mat> imgs, vector<vector<Point2f>> &Points, Size boardSize)
{
for (int i = 0; i < imgs.size(); i++)
{
Mat img1 = imgs[i];
Mat gray1;
cvtColor(img1, gray1, COLOR_BGR2GRAY);
vector<Point2f> img1_points;
findChessboardCorners(gray1, boardSize, img1_points); //计算方格标定板角点
find4QuadCornerSubpix(gray1, img1_points, Size(5, 5)); //细化方格标定板角点坐标
Points.push_back(img1_points);
}
}
int main()
{
//读取所有图像
vector<Mat> imgLs;
vector<Mat> imgRs;
string imgLName;
string imgRName;
ifstream finL("steroCalibDataL.txt");
ifstream finR("steroCalibDataR.txt");
while (getline(finL, imgLName) && getline(finR, imgRName))
{
Mat imgL = imread(imgLName);
Mat imgR = imread(imgRName);
if (!imgL.data && !imgR.data)
{
cout << "请确是否输入正确的图像文件" << endl;
return -1;
}
imgLs.push_back(imgL);
imgRs.push_back(imgR);
}
//提取棋盘格内角点在两个相机图像中的坐标
Size board_size = Size(9, 6); //方格标定板内角点数目(行,列)
vector<vector<Point2f>> imgLsPoints;
vector<vector<Point2f>> imgRsPoints;
getImgsPoints(imgLs, imgLsPoints, board_size); //调用子函数
getImgsPoints(imgRs, imgRsPoints, board_size); //调用子函数
//生成棋盘格每个内角点的空间三维坐标
Size squareSize = Size(10, 10); //棋盘格每个方格的真实尺寸
vector<vector<Point3f>> objectPoints;
for (int i = 0; i < imgLsPoints.size(); i++)
{
vector<Point3f> tempPointSet;
for (int j = 0; j < board_size.height; j++)
{
for (int k = 0; k < board_size.width; k++)
{
Point3f realPoint;
// 假设标定板为世界坐标系的z平面,即z=0
realPoint.x = j*squareSize.width;
realPoint.y = k*squareSize.height;
realPoint.z = 0;
tempPointSet.push_back(realPoint);
}
}
objectPoints.push_back(tempPointSet);
}
//图像尺寸
Size imageSize;
imageSize.width = imgLs[0].cols;
imageSize.height = imgLs[0].rows;
Mat Matrix1, dist1, Matrix2, dist2, rvecs, tvecs;
calibrateCamera(objectPoints, imgLsPoints, imageSize, Matrix1, dist1, rvecs, tvecs, 0);
calibrateCamera(objectPoints, imgRsPoints, imageSize, Matrix2, dist2, rvecs, tvecs, 0);
//进行标定
Mat R, T, E, F; //旋转矩阵、平移向量、本征矩阵、基本矩阵
stereoCalibrate(objectPoints, imgLsPoints, imgRsPoints, Matrix1, dist1, Matrix2, dist2, imageSize, R, T, E, F, CALIB_USE_INTRINSIC_GUESS);
cout << "两个相机坐标系的旋转矩阵:" << endl << R << endl;
cout << "两个相机坐标系的平移向量:" << endl << T << endl;
waitKey(0);
return 0;
}