**前情提要:我们已经掌握了ros工程的各个基本要素,可以开始逐步完成小车仿真了 **
《教程 Re:Zero ROS (四)—— 略讲:Service/msg/srv/tf/urdf/launch/param》
https://blog.csdn.net/Lovely_him/article/details/107778767
教程 Re:Zero ROS (五)
—— 导入模型,关节控制器
1. 下载 & 存放模型
- 1)由上一篇知道,tf描绘的是整体坐标系。在tf的基础上,urdf描绘了整体模型,即各个关节的相对位置。
- 2)如果想要自己拼一个简易的小车模型也可以,大概思路就是:中心原点是车身;往外扩充一部分后接4个轮子;车身上再设定三个传感器的位置,摄像头、激光雷达、IMU(陀螺仪)。使用urdf自定义形状,车身为长扁平矩形,轮子是圆柱。这样就差不多完成了。需要真实一点的话可以再设定转速、摩擦力、扭距等属性。更多内容请查看wiki。
urdf
http://wiki.ros.org/urdf
- 3)我使用比赛时官方提供的小车模型文件。原文件备份已上车至github,在git库的"src"分支内的“赛道和无人车三维模型(7月9日更新).zip”文件便是了。
lovely-him/him_ws
https://github.com/lovely-him/him_ws/tree/src

- 4)解压后有4个主要文件(另外2个中文命名的是说明文件,不过命名可能乱码看不出来)。从左到右分别是:电机输出控制
control_plugin.py、小车三维模型racecar_description.zip、赛道模型racetrack.world、起点终点线模型smartcar_plane.7z。其中,“电机输出控制”就是之前编写topic时做示范例子的“增强版”。“小车三维模型”就是urdf描述文件。“赛道模型”则是之后会讲,是仿真软件gazebo的障碍物描述文件。“起点终点线模型”就是gazebo的模型加载文件。 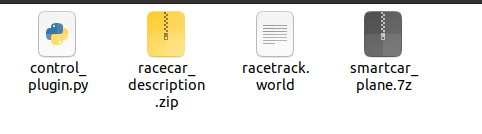
- 5)
smartcar_plane.7z文件,这个文件是需要解压后放到gazebo的模型库内的。模型库的地址为~/.gazebo/models,如果你没下载过模型,可能没有models文件夹,那就自己新建。另外,为了防止gazebo加载时间过长,我们还需要预先下载好gazebo官方的模型库。建议直接进入git使用浏览器下载,因为这个文件不需要安装,只需要复制放在~/.gazebo/models目录下就可以了,注:文件总共1.1G左右。
《ros-gazebo长时间加载不出来问题》
https://blog.csdn.net/weixin_45839124/article/details/106565111
- 6)在官方还没出规则前,北邮的xmy学长就开始研究ros智能车仿真了。之后官方给出模型和规则后学长就对应做了一个教程。教程是使用学长写好的ros工程,载入官方模型使用。因为没有具体教ros和Ubuntu的使用方法,只是讲述每一步的操作。在Ubuntu16.04下跟着教程一步步走勉强(
花了不知道多少天)才实现学长的实验效果。所以我就想自己做个从零开始教程,让新手快速培养兴趣,由此,该系列教程诞生了。
《智能车仿真 —— 2020室外光电组仿真指导(一)》
https://blog.csdn.net/qq_37668436/article/details/107142166
《在ROS下搭建仿真模拟环境,编程控制小车完成定位导航仿真》
https://blog.csdn.net/qq_41133375/article/details/106494744
2.特别说明
- 本篇以下内容全是在Ubuntu-16.04版本ros-kinetic版本下的操作的。参考了北邮学长的帖子,作了我自己的理解、修改与扩展。
- 我本来是想在Ubuntu-20.04版本下实践一遍的,都是第一步导入小车模型时就失败了,不知道为何一直提示
urdf.xarco模型文件语法错误,在16.04版本下是可以无错误完成的。折腾了几天后,决定还是先在16.04版本下速速完结该教程系列,之后再补充20.04版本下的扩展。- 所以,20.04版本下的同学,以下操作内容大概会失败,请留意。有时候指令可能都不存在。并且,我使用了RoboWare Studio IDE。
3.导入模型软件包,gazebo启动,
-
0)我们重新建一个工程,把之前的试验工程放一边。新建的方法前面已介绍过,跳过。然后使用RoboWare Studio IDE打开。可以看到,我新建的工程目录为“~/car_ws",之后注意对应我的代码中的工程目录。
-

-
1)将解压的
racecar_description放到你的ros工程的src文件下。现在你的工程src目录应该如下图。 -


-
2)
racecar_description文件夹内的launch为启动文件,model为起点线和终点线的jpg图片,meshes为摄像头的配置文件(全局搜索一下这个文件夹的名字,可以发现在camera.xaro摄像头属性文件内调用了),rviz是仿真软件rviz的配置文件,urdf是小车的模型本体。现在还差一个worlds地图(赛道)模型文件。我们把压缩包内的racetrack.world文件放入racecar_description/worlds文件夹内。 -


-
3)为了防止软件包名重复和强迫症患者,我们把软件包内的名字修改一下。不过软件的名字是在新建软件包时就已确定,关联了
CMakeLists.txt与package.xml,还有其他大大小小的文件。可以使用IDE内的搜索替换功能,把所有使用到软件包名的地方进行替换。然后使用catkin_make编译,无误即可。 -

-
4)打开
racecar_description/launch/racecar.launch文件,由注释可得知,还需要修改地图文件的路径,把$(find racecar_gazebo)修改为$(find racecar_description)。 -

-
5)编译,无误后在IDE内直接右键启动launch文件,这便是RotoWare的便捷之处,对比普通版本的VS IDE,会发现有越来越多不一样的地方。第一次启动gazebo可能会较慢,卡死在加载画面,即使下载了mods文件。建议等待过长时直接终止launch运行,然后再次打开,就会秒进 。最终效果如下下图。
-
无误后,恭喜,你已成功导入模型并顺利加载了urdf模型文件,在Ubuntu20.04下死活不成功……应该是需要修改某些地方,以后发现问题后再发帖补上。 -


4.创建launch启动gazebo
-
0)虽然上一节中已经使用launch启动了gazebo,不过那是软件包内自带的。为了加深了解,我从零开始一步步创建一个。
-
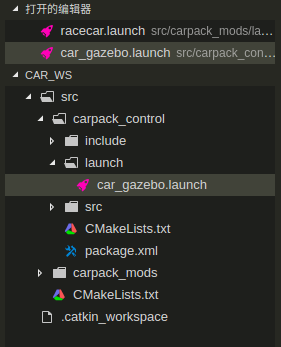
1)在工程内创建一个新的软件包,编译,然后在目录下创建launch文件夹与launch文件。步骤之前进过,跳过。最后目录如下。
-
-
2)启动gazebo的代码很简单,就是导入一个ros官方写好的launch,该launch已经写好了启动软件的内容,并预留了部分配置参数。如果想查看该launch可以使用
roscd直接跳转目录,然后使用vim打开查看。有关launch具体的语法、标签含义,请自行另外学习。
《浅谈Ros中使用launch启动文件的方法(一)》
https://blog.csdn.net/CH_monsy/article/details/107664893
- 开头是参数定义与赋值;然后是引用 gazebo的启动文件;配置参数;其中配置地图文件的路径。可以复制以下代码。
<?xml version="1.0"?>
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!--运行gazebo仿真环境-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
<!-- 此处改成参赛者放置.world文件的地址-->
<arg name="world_name" value="$(find carpack_mods)/worlds/racetrack.world"/>
</include>
</launch>
- 3)保存后,勿忘给予launch文件执行权限。编译无误后IDE内右键启动launch。gazebo内只地图模型,正确。

- 4)额外补充一下gazebo的知识,使用
rqt_graph查看节点,通过wiki的介绍,大概了解一下各个topic的作用。后续的编程中多少会用到。(部分调试话题被我隐藏了)
gazebo
http://wiki.ros.org/gazebo

5.启动rviz,并载入urdf模型
-
1)启动rviz需要一个配置文件,启动指令
rviz时是使用了默认的空配置文件,我们希望使用launch启动rviz,并且针对工程作了相应的配置。首先启动指令roscore,然后启动指令rviz,打开空的rviz。 -

-
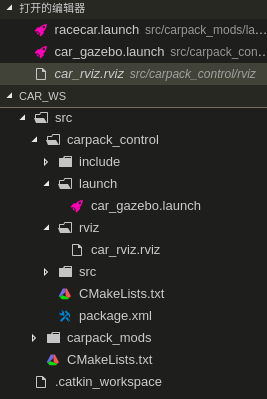
2)先添加一个机器人模型(中科院的教程中由详细教程),然后左上角保存配置文件
File -> Save Config As。另保存到carpack_control/rviz内,rviz文件夹需要新建。然后就可以在IDE内看到相应的rivz配置文件了。 -

-
2)要往rviz内加载模型,先需要有urdf模型数据。在launch内直接调用xacro文件解析器urdf模型,运行robot_state_publisher节点,向tf发布机器人关节状态。最后启动rviz。
urdf
http://wiki.ros.org/urdf
ros初探xacro
https://blog.csdn.net/qq_43786066/article/details/104420700
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find carpack_mods)/urdf/racecar.urdf.xacro'"/>
<!--运行robot_state_publisher节点,向tf发布机器人关节状态-->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!--运行rviz节点,启动rviz-->
<node name="rviz" pkg="rviz" type="rviz"
args="-d $(find carpack_control)/rviz/car_rviz.rviz" required="true"/>
- 其实不事先使用指令
rviz生成rviz配置文件也没关系,因为launch启动rviz节点时如果路径下没有rviz文件就会自动创建一个空的配置文件,只是还是需要先准备好文件夹。

- 3)如果你一开始的rviz内没有模型,只有一堆白色物块,那是因为左边的
Displays -> Global Options -> Fixed Frame没有选择模型的坐标系。如果模型没有正确的建立坐标关系就会变为白色。 
- 4)往rviz内加载小车模型成功后,再往gazebo内加载小车模型。
<!--模型车的位置(比赛时)不能修改-->
<arg name="x_pos" default="-0.5"/>
<arg name="y_pos" default="0"/>
<arg name="z_pos" default="0.0"/>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model shcrobot -param robot_description -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos)"/>

-
5)至此,
car_gazebo.launch文件能成功启动rviz与gazebo并分别加载小车模型了。都是,我们一般使用时,只有最后调试才会启动rviz,前期编写,更多只会启动gazebo。(个人目前阶段)所以,我们把启动rviz与gazebo的launch文件分开。新建一个car_rviz.launch文件,将car_gazebo.launch内的代码剪切,并加上头尾。这样,这部分工作就算完成了。 -
6)最后展示两个launch文件:
car_rviz.launch
<?xml version="1.0"?>
<launch>
<!--运行rviz节点,启动rviz-->
<node name="rviz" pkg="rviz" type="rviz"
args="-d $(find carpack_control)/rviz/car_rviz.rviz" required="true"/>
</launch>
car_gazebo.launch
<?xml version="1.0"?>
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!--模型车的位置(比赛时)不能修改-->
<arg name="x_pos" default="-0.5"/>
<arg name="y_pos" default="0"/>
<arg name="z_pos" default="0.0"/>
<!--运行gazebo仿真环境-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
<!-- 此处改成参赛者放置.world文件的地址-->
<arg name="world_name" value="$(find carpack_mods)/worlds/racetrack.world"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find carpack_mods)/urdf/racecar.urdf.xacro'"/>
<!--运行joint_state_publisher节点,向tf发布机器人关节状态-->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!-- 加不加都没关系,不想弹出调参工具时,将“false”改为“true”即可 -->
<!-- 读取联合位置,然后将它们发布到joint_states -->
<!--node name="joint_state_publisher" pkg="joint_state_publisher"
type="joint_state_publisher">
<param name="rate" value="30"/>
<param name="use_gui" value="false"/>
<remap from="joint_states" to="/racecar/joint_states"/>
</node-->
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model shcrobot -param robot_description -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos)"/>
</launch>
6.编写关节控制器 - 前
-
0)在第三篇教程中,编写的topic话题练习
output_control.py文件,便是关节控制器的用户控制部分的雏形,在此之前还需要设置好底层的关节控制器。在编写前,我们需要知道,控制器节点要订阅/发布哪些话题。我们运行上一节编写好的car_gazebo.launch与car_rviz.launch文件。 -
1)然后启动
rqt_graph工具,这次我们从尝试rqt_gui工具集中打开。执行指令,然后从选项里打开rqt_graph 工具。选择Plugins -> Introspection -> Bode Graph。
rosrun rqt_gui rqt_gui
-
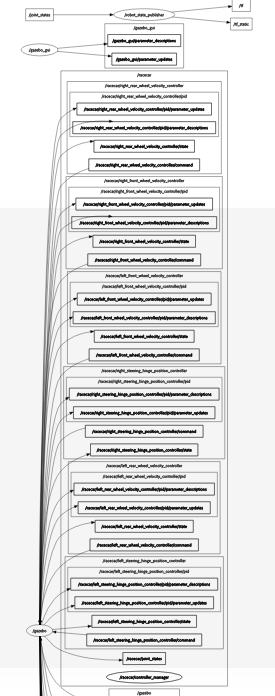
 - 2)然后确保rqt_graph工具的筛选栏与下图一致,这样便能得到和我一样的结构图。这些节点基本都可以在launch文件内找到对应的关系
- 2)然后确保rqt_graph工具的筛选栏与下图一致,这样便能得到和我一样的结构图。这些节点基本都可以在launch文件内找到对应的关系 -
1.:
/joint_state:这是原本应该由gazebo发布的话题,但是因为还没配置,所以没连接上。这个话题记录的是各个关节的详细消息。另外,后期会被我用来当编码器的消息。因为它记载了轮子(关节)的转数与摆角。其实是因为这个车模没有搭载编码器传感器。 -
2.:
/robot_state_publisher:这个节点订阅/joint_state话题,然后发送至tf树,至关重要,没有如果关节的坐标信息没有发往tf树就没有模型可言。 -
3.:
/gazebo_gui:这个节点其实就是gazebo界面(大概)。 -
4.:
/gazebo:节点主要节点之一,发布了众多话题信息。仿真软件gazebo内的一些基本消息都由/gazebo命名空间内的话题发布;小车模型上的摄像头传感器消息都由camera命名空间内的话题发布;而/scan与/imu_data话题分别是小车模型上的激光雷达与陀螺仪传感器发布的话题。全都由该节点发布。 -

-
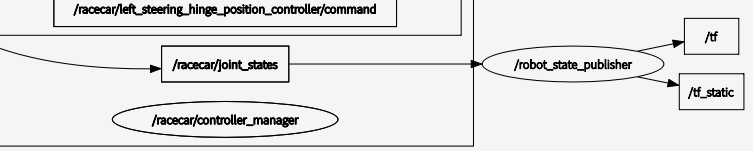
3)现在我们打开tf树看看,依旧是
rqt_gui工具箱。打开后不够地方显示就把rqt_graph工具窗口关闭了。 -


-
4)可以看到tf树的全貌。其中一个椭圆圈就表示一个坐标系。这个模型由不同的方块组成,每个模块又有自己的坐标系/相对位置,然后构成的一个树状图。其中标注的消息
Broadcaster表示这个坐标关系是由哪个节点提供的;Average rate表示提供的频率,即这个关系刷新的频率。部分频率显示10000,那是因为这个相对坐标是固定不变 ,一直跟随它的相对坐标,所以刷新频率是最大值,即不用刷新的意思。你可以在rviz中查看整个小车的各个组成方块,取消勾后不显示,一个个勾选上查看效果。 -

-
5)其中需要变化的关节就是四个轮子的旋转位置,连续改变旋转的位置就达到转速的效果;还有两个前轮的摆动角度。
-

-
6)一开始打开gazebo前,可以先将
car_gazebo.launch文件内添加这一段代码。可以开启rqt_gui的话题消息发布工具。这是个可变动的参数就对应着tf树上10个可变动的相对坐标消息。如果拉动进度条改变参数,可以在rviz软件界面看到相应的变化。
<!-- 读取联合位置,然后将它们发布到joint_states -->
<node name="joint_state_publisher" pkg="joint_state_publisher"
type="joint_state_publisher">
<param name="rate" value="30"/>
<param name="use_gui" value="true"/>
</node>
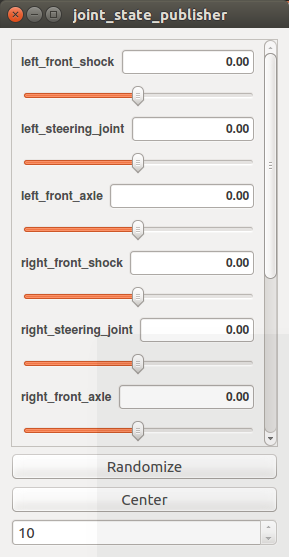
- 7)下图我改了轮子的摆向和高度(现实中可能控制改变高度,这里这是演示)。实际在仿真时我们程序只控制6个关节消息,虽然其他关节可动可调,但是放到现实情况下是不可控的。所以

7.编写关节控制器 - 中
- 0)上一节已经扯完了小车模型的关节消息,主要是向让初学者结合理解urdf模型、tf树、关节控制等概念。
(我个人说的概念都是经过个人理解加工的,并不专业规范,若由感觉前后矛盾的描述,欢迎在评论区指正交流。我无聊常逛论坛。) - 1)为了区分launch的启动功能,我们再新建一个launch启动文件。并在开头载入
car_gazebo.launch文件,以启动gazebo和加载模型。 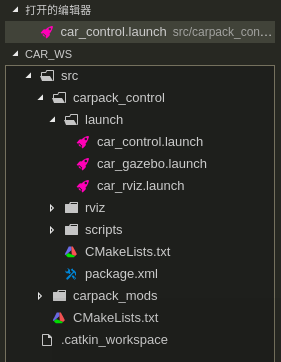
car_control.launch
<?xml version="1.0"?>
<launch>
<!--先启动 gazebo 并加载 模型关节消息 -->
<include file="$(find carpack_control)/launch/car_gazebo.launch" />
</launch>
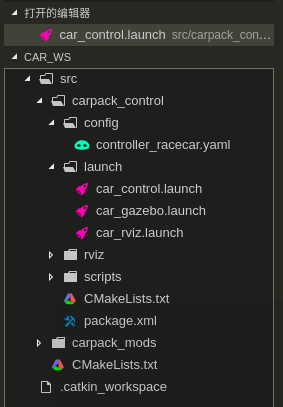
- 2)然后我们需要加载底层联合控制器
controller_manager和参数。首先需要加载参数,因为参数比较多,我们写在另一个文件内,然后再把这个写满参数的文件include进launch文件内。联合控制器的参数可以直接复制以下内容。ros-wiki内有controller_manager节点配置参数的编写方法。我这个是复制北邮学长例程的,在我的him_ws工程下就有这个文件,可以复制。放到下图对应目录下即可。
智能车仿真 —— 2020室外光电创意组线上仿真赛
https://www.guyuehome.com/9123
controller_manager
http://wiki.ros.org/controller_manager
racecar:
# Publish all joint states --公布所有--------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
# Velocity Controllers ----速度控制器---------------------
left_rear_wheel_velocity_controller:
type: effort_controllers/JointVelocityController
joint: left_rear_axle
pid: {
p: 1.5, i: 0.0, d: 0.0, i_clamp: 0.0}
right_rear_wheel_velocity_controller:
type: effort_controllers/JointVelocityController
joint: right_rear_axle
pid: {
p: 1.5, i: 0.0, d: 0.0, i_clamp: 0.0}
left_front_wheel_velocity_controller:
type: effort_controllers/JointVelocityController
joint: left_front_axle
pid: {
p: 0.7, i: 0.0, d: 0.0, i_clamp: 0.0}
right_front_wheel_velocity_controller:
type: effort_controllers/JointVelocityController
joint: right_front_axle
pid: {
p: 0.7, i: 0.0, d: 0.0, i_clamp: 0.0}
# Position Controllers ---位置控制器-----------------------
left_steering_hinge_position_controller:
joint: left_steering_joint
type: effort_controllers/JointPositionController
pid: {
p: 10.0, i: 0.0, d: 0.5}
right_steering_hinge_position_controller:
joint: right_steering_joint
type: effort_controllers/JointPositionController
pid: {
p: 10.0, i: 0.0, d: 0.5}
- 3)注意参数的命名空间(前缀)为
racecar。接着在launch文件内编写,导入参数并启动controller_manager节点。注意节点的命名空间与参数的命名空间一致,都为racecar。且args标签内的6个topic话题名便是我们用户控制的关节了。
<!-- 从yaml文件加载联合控制器的参数 -->
<rosparam file="$(find carpack_control)/config/controller_racecar.yaml" command="load"/>
<!-- 加载控制器 spawner -->
<node name="controller_manager" pkg="controller_manager" type="spawner"
respawn="false" output="screen" ns="/racecar"
args="left_rear_wheel_velocity_controller right_rear_wheel_velocity_controller
left_front_wheel_velocity_controller right_front_wheel_velocity_controller
left_steering_hinge_position_controller right_steering_hinge_position_controller
joint_state_controller"/>
-
4)启动launch文件,当你看到输出窗口打印这些信息时表示
controller_manager已经加载成功。同时,rqt_graph查看节点有生成关节的话题与/racecar/joint_states话题。 -

-
5)这里由出现另一个问题,
gazebo节点发布的/racecar/joint_states话题与/robot_state_publisher节点订阅的/joint_states话题没有关联起来。这里有两个解决方法,要么重映射/robot_state_publisher节点发布的话题,要么重映射gazebo节点发布的话题。 -
我一开始学的时候是参考北邮学长的方法,重映射了
/robot_state_publisher节点发布的话题。采取第二种方法的话,重映射gazebo节点发布的话题会很麻烦,并不是直接在gazebo节点或是controller_manager节点下重映射操作。使用还是推荐直接重映射/robot_state_publisher节点。
car_gazebo.launch
<!--运行joint_state_publisher节点,向tf发布机器人关节状态-->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
<remap from="/joint_states" to="/racecar/joint_states"/>
</node>
8.编写关节控制器 - 后
0)扯完前面的准备操作后,终于可以开始编写用户层面的.py文件,早在第三篇教程就想了,没想到中间拖了那么多需要讲的基础概念。- 1)在目录
carpack_control/scripts下新建.py文件,原本自动创建的Int与src文件夹因为用不到就删了 。然后把之前编写的topic代码复制进去。 
#!/usr/bin/env python
#-*-coding:utf-8-*-
# 加载ros的Python基础包
import rospy
# 加载topic话题 的 msg消息
from std_msgs.msg import Float64
from geometry_msgs.msg import Twist
class main_class:
# 初始化函数
def __init__(self):
# 创建node节点 —— 电机控制
rospy.init_node('motor_control', anonymous=True)
# 订阅topic话题 —— 电机pwm输出
rospy.Subscriber("motor_output", Twist, self.callback)
# 发布topic话题 —— 线速度输出
self.pub_linear = rospy.Publisher('linear_output', Float64, queue_size=10)
# 发布topic话题 —— 角速度输出
self.pub_angular = rospy.Publisher('angular_output', Float64, queue_size=10)
# 阻塞等待
rospy.spin()
# 回调函数
def callback(self,data):
# 创建 msg 消息, 注意:ros的float64是一个结构体
angle = Float64()
speed = Float64()
# 提取 线速度 与 角速度
speed.data = ((data.linear.x) * 8)
angle.data = ((data.angular.z) * 1)
# 向topic话题 发送 msg消息
self.pub_linear.publish(speed.data)
self.pub_angular.publish(angle.data)
if __name__ == '__main__':
try:
main_class()
except rospy.ROSInterruptException:
pass
- 2)将发布的话题改为我们需要的那6个关节话题,因为创建时加了命名空间,所以这里也要加上,同时还有一个后缀
/command。复制粘贴修改完后,大概是这样:
class main_class:
# 初始化函数
def __init__(self):
# 创建node节点 —— 电机控制
rospy.init_node('motor_control', anonymous=True)
# 订阅topic话题 —— 电机pwm输出
rospy.Subscriber("motor_output", Twist, self.callback)
# 发布topic话题 —— 线速度输出
self.pub_lrw = rospy.Publisher('/racecar/left_rear_wheel_velocity_controller/command', Float64, queue_size=10)
self.pub_rrw = rospy.Publisher('/racecar/right_rear_wheel_velocity_controller/command', Float64, queue_size=10)
self.pub_lfw = rospy.Publisher('/racecar/left_front_wheel_velocity_controller/command', Float64, queue_size=10)
self.pub_rfw = rospy.Publisher('/racecar/right_front_wheel_velocity_controller/command', Float64, queue_size=10)
# 发布topic话题 —— 角速度输出
self.pub_lsh = rospy.Publisher('/racecar/left_steering_hinge_position_controller/command', Float64, queue_size=10)
self.pub_rsh = rospy.Publisher('/racecar/right_steering_hinge_position_controller/command', Float64, queue_size=10)
# 阻塞等待
rospy.spin()
# 回调函数
def callback(self,data):
# 创建 msg 消息, 注意:ros的float64是一个结构体
angle = Float64()
speed = Float64()
# 提取 线速度 与 角速度
speed.data = ((data.linear.x) * 8)
angle.data = ((data.angular.z) * 1)
# 向topic话题 发送 msg消息
self.pub_lrw.publish(speed.data)
self.pub_rrw.publish(speed.data)
self.pub_lfw.publish(speed.data)
self.pub_rfw.publish(speed.data)
self.pub_lsh.publish(angle.data)
self.pub_rsh.publish(angle.data)
- 3)添加
.py文件后,别忘记修改CMakeLists.txt、package.xml、和修改可执行权限。然后编译,添加进launch文件中。每次修改.py文件后都需要重新编译,而launch文件修改完后不想要重新编译也可以。
car_gazebo.launch
<!-- 启动关节控制器 用户编写的Python文件 -->
<node name="motor_control" pkg="carpack_control" type="motor_control.py"/>
早期学习时,我后把学到要添加修改的内容都怼上了,.py每导入一个包的内容就在package.xml和CMakeLists.txt添加“依赖”。后来我发现北邮学长的例程中没有只是修改了catkin_install_python的内容而已,后来发现确实只添加这一块地方其他都不改也可以正常运行。因为我还每完全理解CMakeLists各个标签的作用,所以不过多介绍。
CMakeLists.txt
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
catkin_install_python(PROGRAMS
# scripts/my_python_script
scripts/motor_control.py
DESTINATION ${
CATKIN_PACKAGE_BIN_DESTINATION}
)

9.创建按键功能
- 0)这一部分可选,如果由按键功能后续测试domo坐标时会方便一点,都是没有也没关系。因为你跟着教程作不测试也可以,虽然我个人推荐要自己实践能加深掌握。
- 1)按键功能大部分都是Python知识,读取键盘上的按键输入,然后根据按下的键向
/motor_output话题发布对应的键值消息。然后/motor_control节点就订阅,将控制消息再分别发送到车模关节的话题上。 - 2)ros本身就有自带的按键输入控制,中科院的教程例程中也有,不过二者的按键输入节点都运行在终端,输入也是在终端,不美观。北邮学长的按键输入是作了一个可视化窗口,美观不少而且方便使用。但是它的按键输入
.py文件发布的消息不是geometry_msgs/Twist,而是ackermann_msgs/AckermannDriveStamped。所以我们利用之前学习的知识稍作修改。我们先利用rosmsg show指令查看两种msg消息的区别。
rosmsg show geometry_msgs/Twist
rosmsg show ackermann_msgs/AckermannDriveStamped
-

-
3)对比可知,我们只需要将
msg.drive.speed与msg.drive.steering_angle修改为msg.linear.x与msg.angular.z,其他的赋值都删除,并且修改初始化类型等即可。内容较多,不作对比,直接放出已经修改后的代码。
#!/usr/bin/env python
#-*-coding:utf-8-*-
# Copyright (c) 2019, The Personal Robotics Lab, The MuSHR Team, The Contributors of MuSHR
# License: BSD 3-Clause. See LICENSE.md file in root directory.
import atexit
import os
import signal
from threading import Lock
from Tkinter import Frame, Label, Tk
import rospy
from geometry_msgs.msg import Twist
# 定义全局变量
UP = "w"
LEFT = "a"
DOWN = "s"
RIGHT = "d"
QUIT = "q"
# 状态
state = [False, False, False, False]
# python多线程语法,创建一个锁,防止多个程序同时调用打印功能
state_lock = Lock()
# 初始化赋值
state_pub = None
root = None
control = False
# 检测哪个按键被按下
def keyeq(e, c):
return e.char == c or e.keysym == c
# 按键是否被松开
def keyup(e):
global state
global control
# python语法
with state_lock:
if keyeq(e, UP):
state[0] = False
elif keyeq(e, LEFT):
state[1] = False
elif keyeq(e, DOWN):
state[2] = False
elif keyeq(e, RIGHT):
state[3] = False
control = sum(state) > 0
# 按键是否被按下?
def keydown(e):
global state
global control
# python语法
with state_lock:
if keyeq(e, QUIT):
shutdown()
elif keyeq(e, UP):
state[0] = True
state[2] = False
elif keyeq(e, LEFT):
state[1] = True
state[3] = False
elif keyeq(e, DOWN):
state[2] = True
state[0] = False
elif keyeq(e, RIGHT):
state[3] = True
state[1] = False
control = sum(state) > 0
# Up -> linear.x = 1.0
# Down -> linear.x = -1.0
# Left -> angular.z = 1.0
# Right -> angular.z = -1.0
# 订阅话题的回调函数
def publish_cb(_):
with state_lock:
if not control:
return
# 创建msg消息
ack = Twist()
# 根据按下的键赋值
if state[0]:
ack.linear.x = max_velocity
elif state[2]:
ack.linear.x = -max_velocity
if state[1]:
ack.angular.z = max_steering_angle
elif state[3]:
ack.angular.z = -max_steering_angle
# 话题发布消息
if state_pub is not None:
state_pub.publish(ack)
def exit_func():
# system函数可以将字符串转化成命令在服务器上运行;
os.system("xset r on")
def shutdown():
root.destroy()
# destroy()只是终止mainloop并删除所有小部件
rospy.signal_shutdown("shutdown")
# 主函数
def main():
global state_pub
global root
# 声明全局变量
global max_velocity
global max_steering_angle
# 获取变量,从参数服务器中中
max_velocity = rospy.get_param("~speed", 2.0)
max_steering_angle = rospy.get_param("~max_steering_angle", 0.34)
# 不设立默认值了,确保有写
key_publisher = "/motor_output"
# 创建topic话题,发送按键信息
state_pub = rospy.Publisher(
key_publisher, Twist, queue_size=1
)
# 创建周期性调用函数“publish_cb”,频率是1/0.1=10Hz,
rospy.Timer(rospy.Duration(0.1), publish_cb)
# 注册函数。在程序结束时,先注册的后运行
atexit.register(exit_func)
os.system("xset r off")
# 创建窗口对象的背景色
root = Tk()
# 框架控件;在屏幕上显示一个矩形区域,多用来作为容器
frame = Frame(root, width=100, height=100)
frame.bind("<KeyPress>", keydown)
frame.bind("<KeyRelease>", keyup)
frame.pack()
frame.focus_set()
# 窗口显示
lab = Label(
frame,
height=10,
width=30,
text="Focus on this window\nand use the WASD keys\nto drive the car.\n\nPress Q to quit",
)
lab.pack()
print("Press %c to quit" % QUIT)
root.mainloop()
if __name__ == "__main__":
rospy.init_node("key_control", disable_signals=True)
# 安全操作
signal.signal(signal.SIGINT, lambda s, f: shutdown())
main()
- 4)将
.py文件保存在工程中,并修改CMakeLists.txt与launch文件。然后修改权限与编译。无误后就可以启动launch查看效果。 
<!-- 启动按键控制器 用户编写的Python文件 -->
<node name="key_control" pkg="carpack_control" type="key_control.py"/>
catkin_install_python(PROGRAMS
# scripts/my_python_script
scripts/motor_control.py
scripts/key_control.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
- 5)最后,启动launch后会弹出一个
tk小框框,在这个tk下按下“wasd”按键,可以看到gazebo内的小车运动了起来,你可以尝试一下使用按键控制,跑完整个赛道。ohhhhhhh 
10.结语
0)本来想在Ubuntu20.04版本下操作的,没想到卡了几天没成功,之后又懒惰了几天,拖了一个星期才开始动笔写。- 1)可喜可贺,结果几万字的敲打,终于可以让模型小车动起来了,下一篇讲完最后一点内容就结束啦。目前已经实现了控制、运动了,接下来只需要导入一些前人已经写好的ros功能包,就能实现导航、定位、避障功能了。
《教程 Re:Zero ROS (六)—— 获取&编写&检验 -> odom坐标系》
https://blog.csdn.net/Lovely_him/article/details/107948765