车载毫米波雷达的原理
车载毫米波雷达通过天线向外发射毫米波,接收目标反射信号,经后方处理后快速准确地获取汽车车身周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等),然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,最终通过中央处理单元(ECU)进行智能处理。经合理决策后,以声、光及触觉等多种方式告知或警告驾驶员,或及时对汽车做出主动干预,从而保证驾驶过程的安全性和舒适性,减少事故发生几率。

图1 毫米波雷达工作路径简图
车载毫米波雷达工作体制

图2 毫米波雷达工作方式
根据辐射电磁波方式不同,毫米波雷达主要有脉冲体制以及连续波体制两种工作体制。其中连续波又可以分为FSK(频移键控)、PSK(相移键控)、CW(恒频连续波)、FMCW(调频连续波)等方式。
FWCW雷达是最常用的车载毫米波雷达。能同时测出多个目标的距离和速度信息,可对目标连续跟踪,系统敏感性高,错误报警率低;不易受外界电磁噪声的干扰;测量距离远,分辨率高;所需发射功率低;成本较低;信号处理难易程度及实时性可达到系统要求。
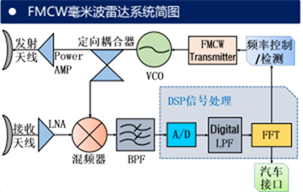
图3 FMCW雷达系统
FMCW雷达系统主要包括收发天线、射频前端、调制信号源和信号处理模块等。
- FMCW调制信号发生器经过压控振荡器(VCO)产生高频信号(GHz级别),一部分能量耦合输入混频器作为本振信号,另一部分能量经功率放大器(PA)由发射天线以电磁波的方式向空中辐射。
- 电磁波在空气中向前方传播过程中如遇到目标则会小部分反射,反射回来的回波信号被接收天线截获形成电信号。
- 回波信号经低噪声放大器(LNA)放大,与本振信号在混频器进行混频, 输出一个较低的差拍频率(一般为MHz级别),差频信号含有目标和雷达之间的距离和相对速度等信息。
- 然后通过带通滤波器(BPF)放大滤波,A/D转换,对所得到的数字信号作FFT(快速傅氏运算),进行频谱分析,便可以获得目标和雷达之间的距离、相对速度及方位角等信息。
- 最后经由控制电路做出危险状况的判断,向驾驶员发出预警,或结合环境情况对汽车做出主动干预。
车载毫米波雷达的应用
把毫米波雷达安装在汽车上,可以测量从雷达到被测物体之间的距离、角度和相对速度等。毫米波雷达目前主要应用于中高端车型,随着大众对汽车主动安全性能的认可度增加,ADAS相关产品将逐渐向低端车型普及。

图4 汽车ADAS系统主要功能
利用毫米波雷达可以实现自适应巡航控制(Adaptive Cruise Control),前向防撞报警(Forward Collision Warning),盲点检测(Blind Spot Detection),辅助停车(Parking aid),辅助变道(Lane change assistant),自主巡航控制(ACC)等高级驾驶辅助系统(ADAS)功能。
多种传感器融合应用是未来必然趋势,毫米波雷达将率先成为ADAS系统主力传感器。
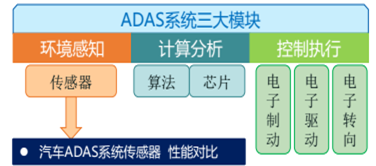
图5 ADAS系统模块

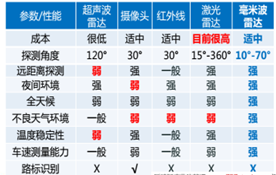
图6 传感器性能对比

图7 汽车传感器配置图
毫米波雷达是使用工作频段为30~300GHz毫米波(波长为1~ 10mm)的雷达。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。同厘米波雷达相比,毫米波雷达具有体积小、易集成和空间分辨率高的特点。早期毫米波雷达主要应用于军事领域,随着雷达技术的发展与进步,毫米波雷达传感器开始应用于汽车电子、无人机、智能交通等多个行业中。
车载毫米波雷达频段
为避免与其他设备频段冲突,车载雷达需要分配专属频段,各国频段划分略有不同。由于在大气中衰减较弱等原因,目前主流市场产品多集中在24GHz频段和77GHz频段。2015年日内瓦世界无线电通信大会将77.5-78.0GHz频段划分给无线电定位业务,以支持短距离高分辨率车载雷达的发展,从而使76-81GHz都可用于车载雷达,为全球车载毫米波雷达的频率统一指明了方向

图8 各国车载毫米波雷达频段划分历程
24GHz雷达系统主要实现近距离探测(SRR),77GHz系统主要实现远距离的探测(LRR),79GHz系统主要实现中距离的探测(MRR)。
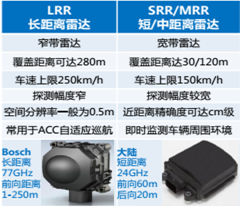
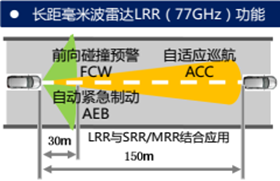
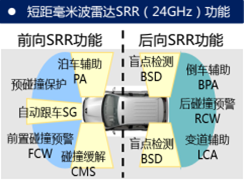
图9 毫米波雷达功能
目前,比较常见的车载领域的毫米波雷达频段有三类。
24GHz这个频段,目前大量应用于汽车的盲点监测、变道辅助。雷达安装在车辆的后保险杠内,用于监测车辆后方两侧的车道是否有车、可否进行变道。这个频段也有其缺点,首先是频率比较低,另外就是带宽比较窄,只有250MHz。

图10 24GHZ频段毫米波雷达
77GHz这个频段的频率比较高,国际上允许的带宽高达800MHz。这个频段的雷达性能要好于24GHz的雷达,所以主要用来装配在车辆的前保险杠上,探测与前车的距离以及前车的速度,实现的主要是紧急制动、自动跟车等主动安全领域的功能。与24G雷达相比,77G雷达的检测距离远,体积小,更易于安装,功耗低,对于行人和自行车以及物体监测的效果优于24G雷达,这就意味着在更多的应用场景上,它可以提供更安全、更优良的性能。

图11 77GHZ频段毫米波雷达
最后是79GHz,这个频段最大的特点就是其带宽非常宽,要比77GHz的高出3倍以上,这也使其具备非常高的分辨率,可以达到5cm。这个分辨率在自动驾驶领域非常有价值,因为自动驾驶汽车要区分行人等诸多精细物体,对带宽的要求很高,这个频段在未来的自动驾驶领域会有很广泛的应用。

图12 79GHZ频段毫米波雷达
在波长方面,24GHz毫米波的波长是1.25cm,而77GHz毫米波的波长大概是4mm,毫米波的波长要比光波的波长长1000倍以上,所以它对物体的穿透能力更强。这种可靠性是其他任何传感器难以达成的,所以在ADAS这样一个对安全性、可靠性要求比较高的领域,毫米波雷达拥有很难撼动的地位。
毫米波雷达目前主要应用于中高端车型,随着大众对汽车主动安全性能的认可度增加,ADAS相关产品将逐渐向低端车型普及。完全实现ADAS各项功能一般需要“1长+4中短” 5个毫米波雷达。目前全新奥迪A4采用5个毫米波雷达(1长+4短),奔驰的S级采用7个毫米波雷达(1长+6短)。以自动跟车型(Stop & Go)ACC功能为例,一般需要3个毫米波雷达。车正中间一个77GHz的LRR,探测距离在150-250米之间,角度为10度左右;车两侧各一个24GHz的MRR,角度都为30度,探测距离在50-70米之间。AEB是最有实际意义的ADAS功能,未来会成为中高档汽车的标配,需要1个77GHz的LRR

图13 奔驰S级采用7个毫米波雷达“1 LRR + 6SRR ”
车载毫米波雷达未来趋势:77GHz频段
长期来看,最终车载毫米波雷达将会统一于77GHz频段(76-81GHz),该频段带宽更大、功率水平更高、探测距离更远;相比于24GHz,物体分辨准确度提高2-4倍,测速和测距精确度提高3-5倍,能检测行人和自行车;且设备体积更小,更便于在车辆上安装和部署。77GHz频率范围是全球装配永久认可的权威频段,因此更适用于全球车辆平台。 其中76-77GHz主要用于长距离毫米波雷达,77-81GHz主要用于中短距离毫米波雷达。未来79GHz频段(77-81GHz)中短距离毫米波雷达会成为中距离MRR的主流,且有望全面替代24GHz短距离雷达,取代周期取决于各国工业水平、市场趋势及政策力度。

图14 未来趋势77GHz频段