作者 | 晓畅Auto 编辑 | 汽车人
原文链接:https://www.zhihu.com/question/534484699/answer/2877505622
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【多传感器融合】技术交流群
本文只做学术分享,如有侵权,联系删文
今天我们来深入探讨一波毫米波雷达的原理与技术细节。
依据雷达的工作机制,毫米波雷达可以被分为两个大类——脉冲体制毫米波雷达及连续波体制毫米波雷达,连续波体制毫米波雷达又可细分为 CW、FSK、PSK 及 FMCW。
很多小伙伴第一次接触这么多术语,一时间都懵逼了。别急,我们一一来分析。
首先是脉冲体制雷达,所谓脉冲就是短时间内发出去的一束信号,具体可参见六脉神剑,相信你瞬间就能懂得脉冲的内涵。唯一的区别就是雷达的脉冲不会有那么强的攻击力。这种断续的、隔一段时间发一个信号的雷达就叫脉冲雷达。显然憋这么久才发一束波是为了攒个大招,因此这种雷达属于大功率雷达,一般用于军事侦察,能够在超远距离上发现敌机。显然,这种机制不太适用于汽车。
再说连续被体制,有了脉冲体制做铺垫,连续波就很好理解了,就一直连续不断发信号呗。不过连续发波也有区别,CW是指恒频连续波,频率恒定,通过多普勒效应探测目标物体速度,但是不能测距;FSK是频移键控,这种方式可探测距离和速度,并且精度高,可惜的是不能同时探测多个目标;PSK是相移键控,这种方案技术不太成熟;因此,众人期待的目光就落在FMCW调频连续波上面。因为兼具了前面方案的所有优势,因此它光荣成为车载雷达最常用的工作机制。
再说回到FMCW雷达,FMCW是Frequency Modulated Continuous Waves的缩写。意即雷达发射出去的电磁波的频率是连续可调制的。FMCW的核心便是一种被称为线性调频脉冲的信号。意即频率随时间成线性增长的正弦波。就是长下面这个样子。
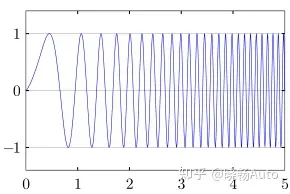
这和我们平时所见的标准正弦波不太一样,因为标准正弦波的频率是不变的,为1/2π。而线性调频脉冲其频率是随时间变化的,如果做一个以时间为横轴,频率为纵轴的图,可想而知这是一条斜率为正的直线。
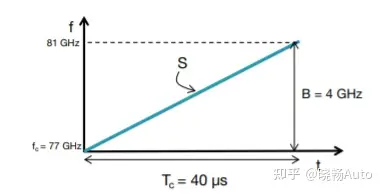
此处如果我们加上一些数据,可能更有益于大家的理解。一个线性调频脉冲必然有一个起始频率fc,这里我们取fc=77GHz,也就是车载雷达最常用的频率。带宽B我们取4GHz,也就是这段脉冲从77GHz开始跨越4GHz最终到达81GHz。它的持续时间为40微秒。由此计算可知斜率S=100MHz/us。
这里我们要先科普一下雷达的结构。雷达主要由天线、发射机和接收机三部分组成。其中天线又分发射天线Tx和接收天线Rx。Tx和发射机相连,由发射机产生射频信号,发射天线发射出去;Rx与接收机相连,接受物体产生的回波信号。但是在Rx与接收机相连之前要经过一个特殊处理的部分,叫做混频器,英文称mixer。
之所以需要混频器是因为雷达发射接收的都是模拟信号,而接下来供计算机分析处理的需要的是数字信号。因此就需要对模拟信号进行采样。而根据奈奎斯特采样定理或者香农采样定理,要使得采样信号能够恢复原有信号的内容,则采样频率必须大于等于原有信号的两倍。
现在再看看我们原有的雷达波频率——77GHz,再乘个两倍可就达到惊人的上百GHz了,属于超高频,根本没法进行采样。因此为了能够进行方便地采样工作,我们要想办法降低原先射频信号的频率,由此就想到了混频器。混频器的作用就是将两个信号结合起来产生一个新信号,并且新信号的频率为两信号频率之差,相位也为两信号相位之差。
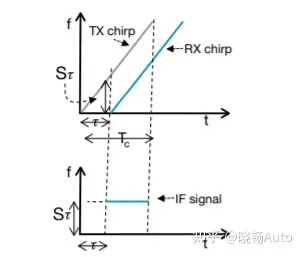
由此我们就得到了一个频率比之前射频小得多的信号,叫做中频信号IF。由于混频器混合的是发射信号与回波信号,两者本质相同只是有一个时间差,因此整个线性调制波存在的时间段内,两者的频率差值都是相同的。而根据简单的距离=速度* 时间公式,只要知道了发射波与回波之间的这段时间差,就能求出距离,因为对于电磁波而言速度就是光速是一个定值。由此,我们就获得了雷达测距的基本原理,实质上就是利用了电磁波的反射原理。
之前我们考虑的都是一个目标物体的例子,如果雷达前方出现多个物体,这在实际车辆行驶过程中是非常常见的,雷达又该如何识别多个物体?
我们还是从雷达测距的原理出发,试想,如果出现多个物体,则Rx接收到的回波数量也会变成多个,并且会随着距离远近相应的呈现不同的线。具体来说就是距离近的目标Rx先接受到,距离远的雷达后接收到其回波。但是无论远近,他们的IF中频信号始终是恒定频率的。频率恒定,表现在时间为横轴的坐标系中就是一个个正弦函数。
不过在时域中,信号的很多细节被隐藏了。这时候就需要用到信号处理领域最常用的傅里叶变换。傅里叶变换的作用便是把信号从时域转至频域。这就好比你从物体正面观察,无法观察到物体的背面,但是当你换一个角度之后,便能轻松看到背面。傅里叶变换也是同样的道理,在时域图中交叠着的几个正弦信号,在频谱图中便乖乖的分割开来,每一个波峰代表一个物体。就能一目了然的看出雷达识别到了几个物体。
不过现实情况往往比这复杂,比如当出现两物体相距很近的时候,雷达如何把它们区分开?或者说,物体相距到什么程度的时候,雷达便无法将他们分别识别出来了?
这个时候即使再看频域图,你也会发现可能只有一个峰值了。
这时候就需要我们拉长观测时间,观测窗口一旦变长了,正弦信号便能够分割开来,频域图中也显示出了两个峰值。而观测时间的拉长对应的实际上是频带B的变大,因此我们可以得出结论,带宽越长,雷达的分别率越高。这一点也恰恰对应了雷达的距离分辨率公式。对于前面提到的4GHz的带宽的雷达,其距离分别率可达到厘米级,约3.75cm。这个精度在自动驾驶中是完全够用了的。
以上就是FMCW毫米波雷达在测距时的原理及技术细节讲解,下一次我们聊聊雷达是如何测速的。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!
