纯微分控制的缺陷
U(s)/E(s)=TdS
U(s)=TdS*E(s) 两边拉氏变换之后再经离散可得
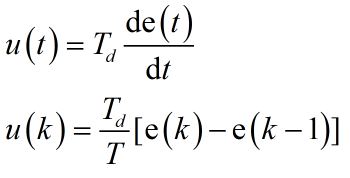
当e(t)为阶跃输入时
注:采样过程中e(t)一定是要变化的,不可能为阶跃输入,不然控制系统就没有存在的意义了。但是实际中也不是每一次采样的数值都拿来去求e(t)。系统有一个控制周期,控制周期内的采样值可能不同,但起作用的只有控制周期开始的第一个值,如果每次采样都执行就好比老师让你去图书馆,你还没到就又让你去教学楼,教学楼还没到又让你去操场。系统需要一个执行命令的时间,这个时间就是控制周期,在这个周期里e(t)就是阶跃输入。
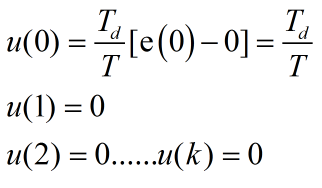
结论:
①纯微分系统只在第一个采样周期时控制器有输出
②当T较小时,Td/T作用较大,容易引起执行机构在控制信号过大的情况下进入饱和区或截止区导致执行机构呈现非线性特性,进而导致系统出现过大超调和持续振荡,动态品质变差
③微分作用对噪声(高频扰动)较敏感,容易导致控制过程振荡,降低了调节品质
改进:
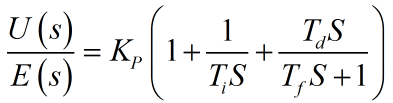
在纯微分环节上串接一个惯性环节,增强微分的作用时间 则PID算法的结构框图就变为

此时的传递函数为
改进后的PID算法和标准PID算法的编写方法相同,唯一需要注意的就是改进后的微分项怎样离散化
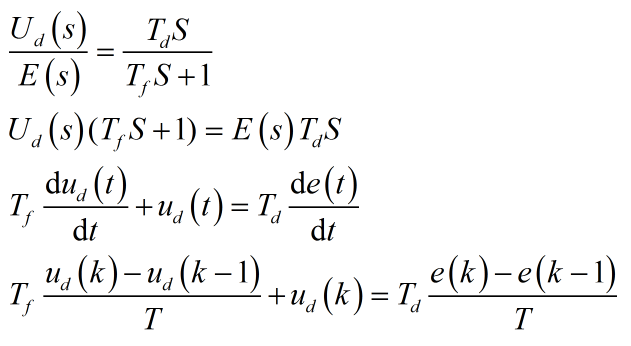
最终的化简出Ud(k),需注意,最终求解u(k)=Up+Ui+Ud时不能合并Ud(k-1)与U(k-1)
求解出的u(k)为位置式,增量式同样是△u(k)=u(k)-u(k-1),这里不再推导
最后上张图看一下完全微分和不完全微分的区别
