halo~我是bay_Tong桐小白
本文内容是桐小白个人对所学知识进行的总结和分享,知识点会不定期进行编辑更新和完善,了解最近更新内容可参看更新日志,欢迎各位大神留言、指点
图的总结——基本知识要点汇总
【更新日志】
最近更新:
- 暂时没有编辑记录,后续会持续完善优化
计算机统考408考纲要求
2021计算机统考408考纲数据结构学科考察目标
- 掌握数据结构的基本概念、基本原理和基本方法
- 掌握数据结构的逻辑结构、存储结构及基本操作的实现,能够对算法进行基本的时间复杂度与空间复杂度的分析
- 能够运用数据结构的基本原理和方法进行问题的分析与求解,具备采用C或C++语言设计与实现算法的能力
2021计算机统考408数据结构考纲变动情况

2021计算机统考408考纲对图部分考察要求
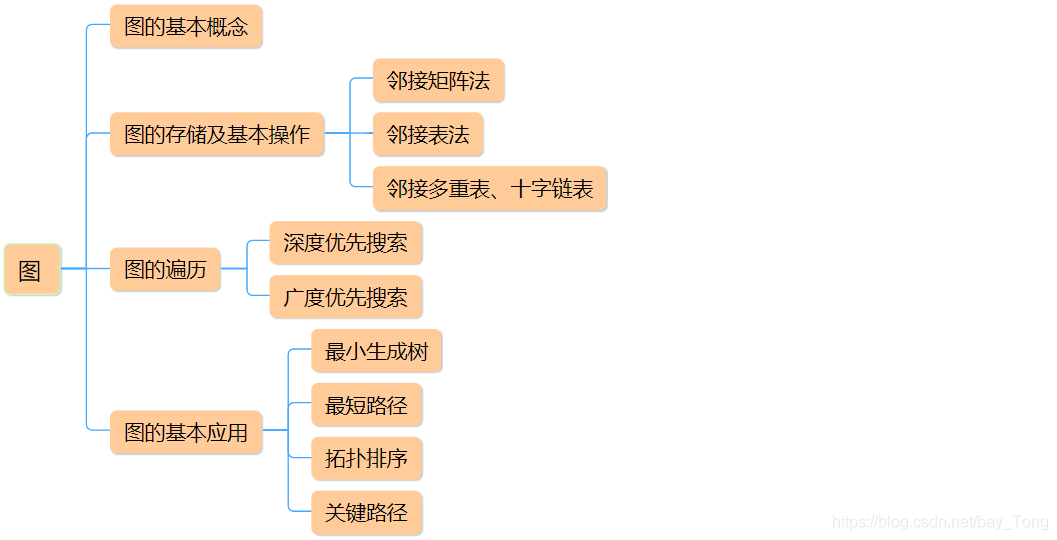
图的相关基本概念
- 邻接点:边的两个顶点
- 关联边:若边e = ( v , u ),则称顶点v、u与边e关联
- 无向图:<x,y>∈VR且<y,x>∈VR,即(x,y)为无序对,图中的边无向
- 有向图:<x,y>表示从x到y有一条弧,x为弧尾,y为弧头,即图中的边有向
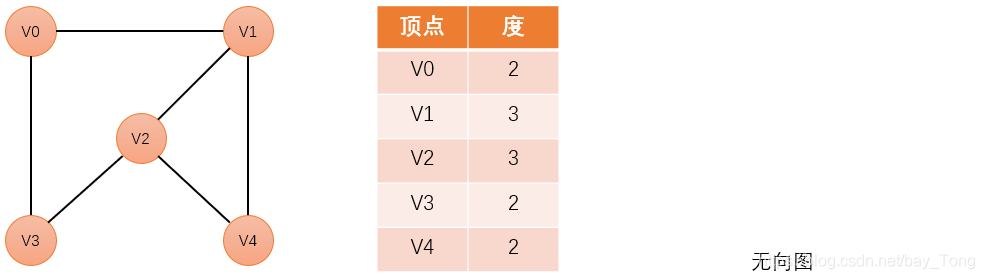
- 顶点的度
无向图:顶点v的度 = 与v相关联的边的数目
有向图:顶点v的度 = v的出度(以v为起点的有向边数) + v的入度(以v为终点的有向边数)

- 完全图:一个简单的无向图,其中每对不同的顶点之间都恰连有一条边相连
无向完全图:含n个顶点的无向完全图,有n(n-1)/2条边
有向完全图:含n个顶点的有向完全图,有n(n-1)条弧 - 连通图:无向图G中任一顶点均可到达其它任一顶点,即对任何两个顶点v、u,都存在从v到u的路径,则G为连通图
- 强连通图:有向图中任意两点都有路径
要连通具有n个顶点的有向图,至少需要n条边 - 子图:
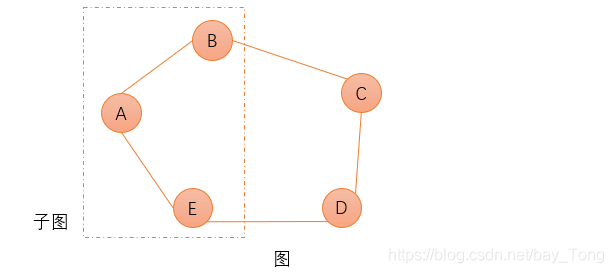
- 生成子图:
1.包含图中所有顶点
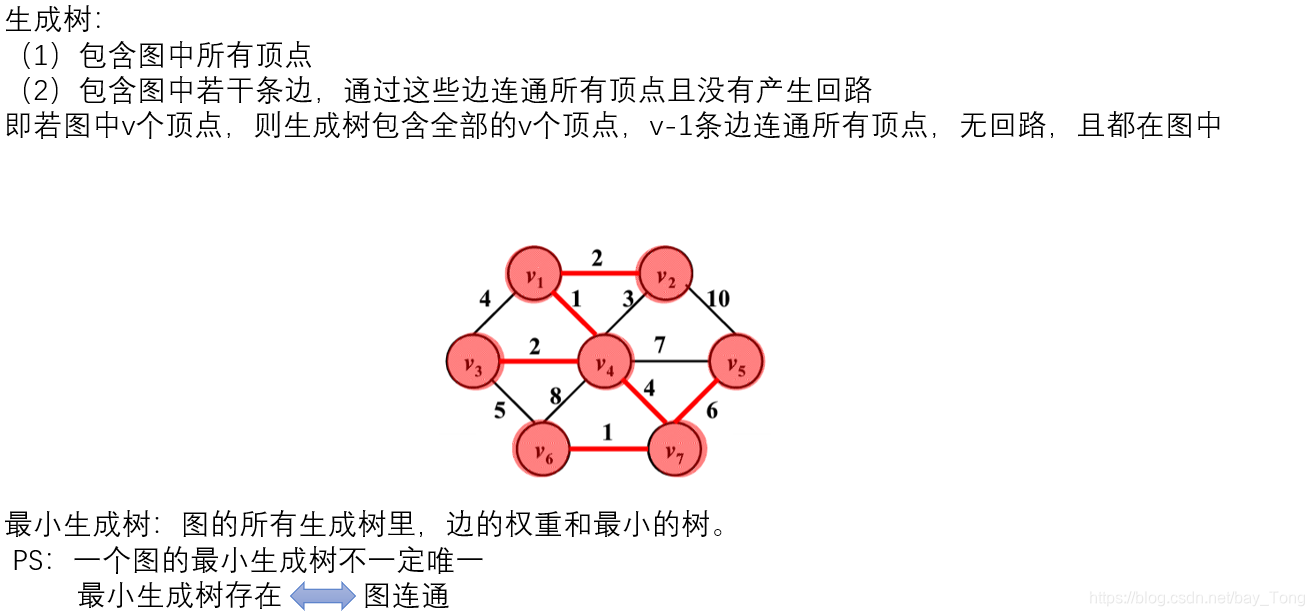
2.包含图中若干条边 - 生成树:
1.包含图中所有顶点
2.包含图中若干条边,通过这些边联通所有顶点且没有回路,即若图中v个顶点,则生成树包含全部的v个顶点,v-1条边连通所有顶点,无回路,且都在图中
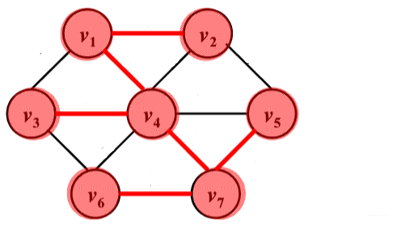
- 极小连通子图:一个连通图的生成树是原图的一个极小连通子图,它含有图中全部 n 个顶点,包含且只包含图中的 n-1 条边,即
1.该子图是连通子图,包含原图的所有顶点
2.子图中无回路,在该子图中删除任何一条边,子图不再连通 - 极大连通子图:对子图再增加原图中的其它顶点子图就不再连通
- 连通分量:无向图G的极大连通子图称为图G的连通分量。任何连通图的连通分量只有一个,即其自身。非连通图的无向图有多个连通分量
- 强连通分量:非强连通图的极大连通子图称为它的强连通分量
【PS:图中的边不考虑重边和自回路;图不可以是空图,图可以没有边,但是至少要有一个顶点】
图的存储结构
(图的存储也是广义表多重链表的一种应用,广义表工作原理详细见本栏文章《数组和广义表总结——基本知识要点汇总》)
邻接矩阵表示法
邻接矩阵:二维数组来表示,如G[ i ][ j ]表示 i 到 j 的一条边,无权图中若有边则G[ i ][ j ]的值为1否则为0,有权图中若有边则该值可以是边的权重,若无边则为无穷大,以一个很大的数来表示
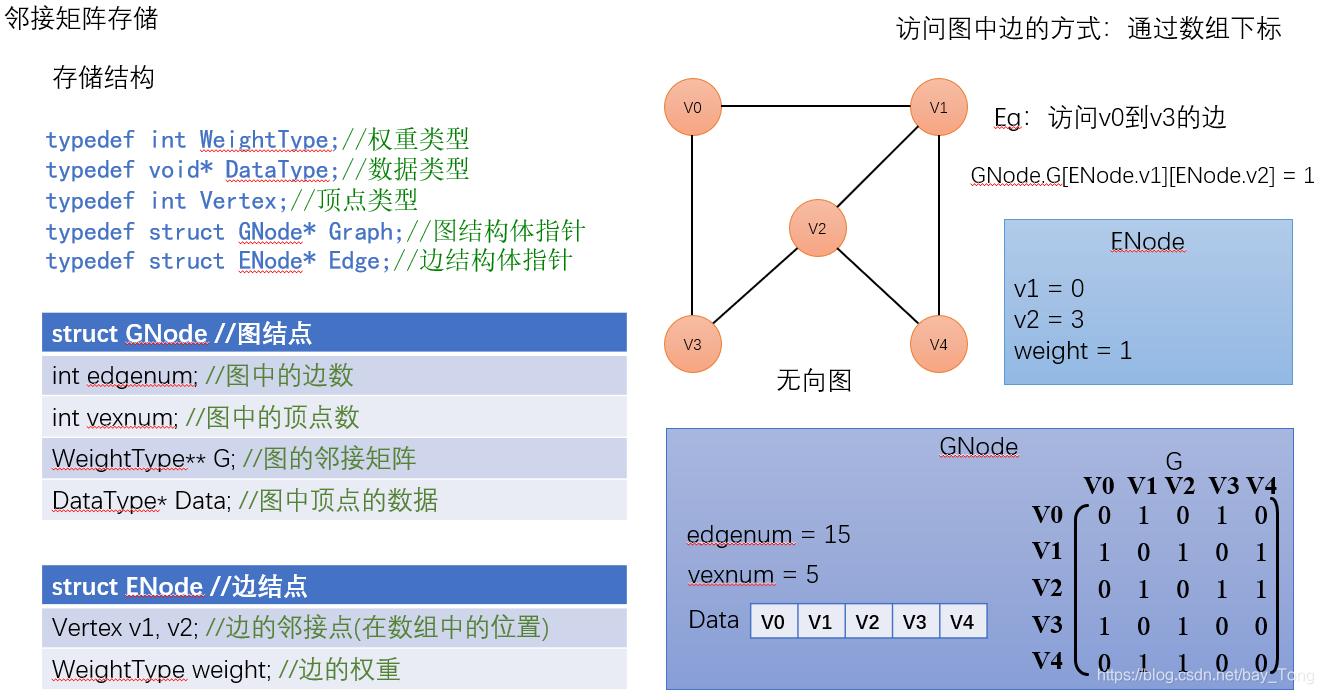
【无向图可以进行压缩存储,用一维数组只存矩阵的一半,通常习惯存下三角矩阵。邻接矩阵适合用于稠密图(此部分可与对称矩阵进行联系,对称矩阵详细内容见本栏文章《数组和广义表总结——基本知识要点汇总》)】

- 根据邻接矩阵求顶点v的度:遍历顶点v所在行,求1(或非无穷大)的个数,即为顶点v的出度
- 根据邻接矩阵找邻接点:即二维数组单元对应另一下标
邻接表表示法
邻接表:将一个顶点的所有出边邻接点构成一个单链表,该链表的头指针和该顶点数据一起存在一个结构数组中(类比树的孩子表示法,树的孩子表示法详细内容见本栏文章《树和二叉树总结——基本知识要点汇总》)

【邻接表适用于稀疏图,无向图邻接表中,设顶点有m个,图的边数为e,则使用邻接表存储占用存储空间为 m+2*e ,会造成一定程度的空间浪费】
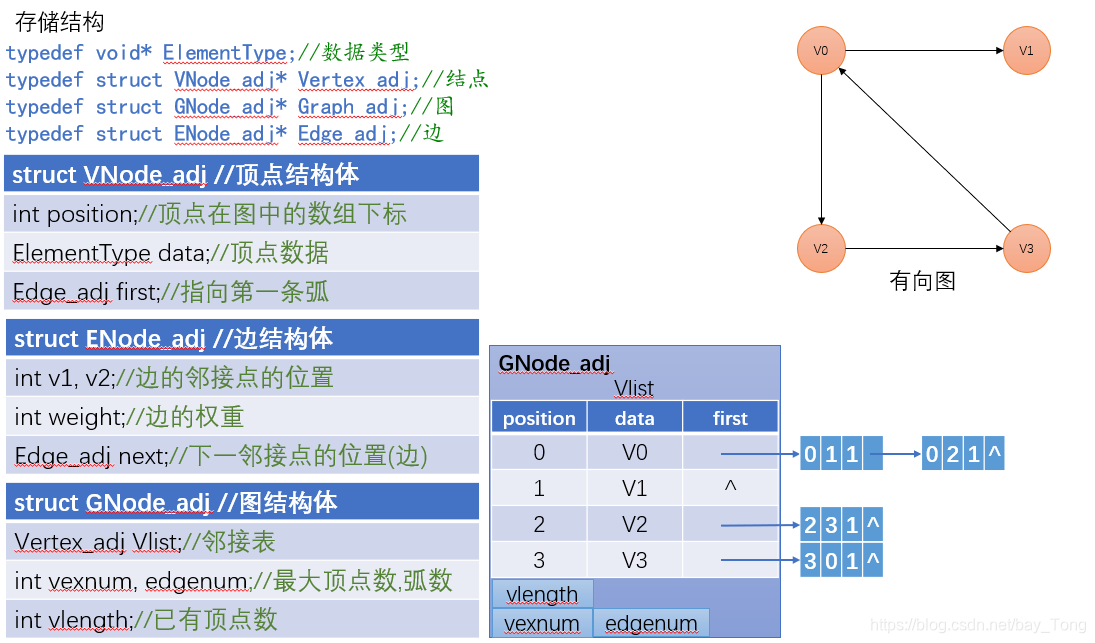
- 根据邻接表求顶点v的度:遍历顶点v的单链表,链表的长度即为顶点v的出度,求顶点的入度则需要遍历整个数组的所有邻接链表(无向图的入度等于出度,无需遍历所有邻接表)
- 根据邻接表找邻接点:链表结点中另一邻接点的值即为另一邻接点的下标
逆邻接表(入边表):以同一顶点为终点的弧构成一个单链表,该链表的头指针和该顶点数据一起存储在一个结构数组中

图的十字链表法与邻接多重表后续更新……
图的十字链表部分内容可见本栏文章《数组和广义表总结——基本知识要点汇总》
图的遍历
从图的某顶点出发,访问图中所有顶点,并且每个顶点仅访问一次,主要遍历方法有两种,即深度优先遍历(DFS)与广度优先遍历(BFS)
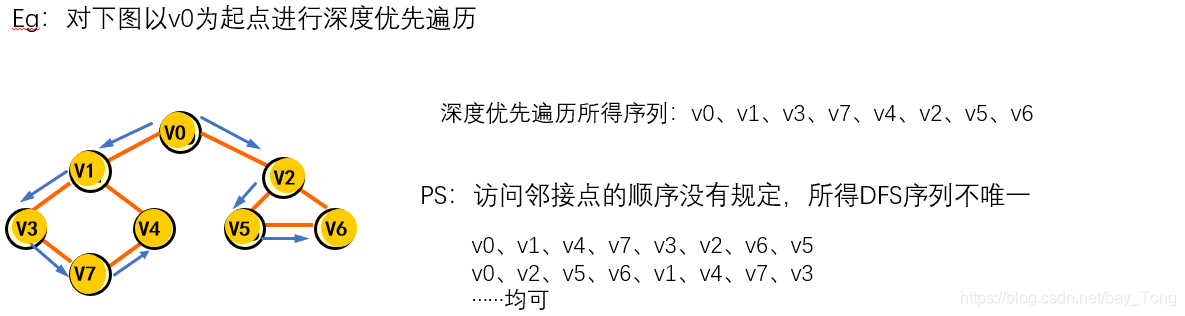
深度优先遍历(DFS)
基本思路:
- 从图中某个未被访问过的顶点v出发,访问顶点v
- 若v有未被访问的邻接点,则访问该邻接点,并继续从该点出发,继续对图进行深度优先遍历,直至图中和v有路径相通的顶点均被访问
- 访问下一个未被访问过的顶点,进行深度优先遍历,直至图中所有顶点均被访问
根据深度优先遍历策略基本思路特点,可选择栈结构(暂存当前结点,访问其邻接点,实现路径相通的顶点遍历)进行算法的实现
详细代码实现见基本操作集汇总部分
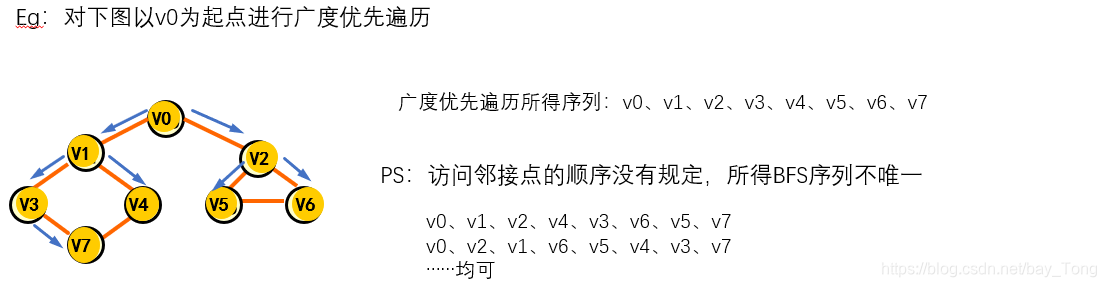
广度优先遍历(BFS)
基本思路:
- 从图中某未访问过的顶点v出发,访问顶点v
- 访问v的所有未被访问的邻接点
- 依次从这些邻接点出发,访问它们的所有未被访问的邻接点,直到图中所有访问过的顶点的邻接点都被访问
根据广度优先遍历策略基本思路特点,可选择队列结构(暂存当前顶点的邻接点,顺序访问所有邻接点)进行算法的实现
详细代码实现见基本操作集汇总部分
图的连通性问题
- 连通图仅调用一次搜索过程便可以遍历图中的各个顶点
- 非连通图需多次调用搜索过程,每次调用得到的顶点访问序列恰为各连通分量中的顶点集
- 通过遍历得到的为深度优先生成树与广度优先生成树
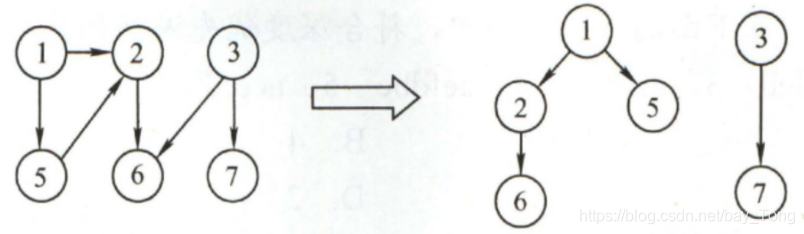
(1)深度优先生成树:
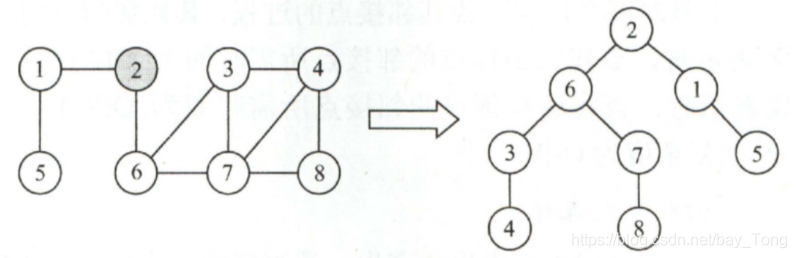
(2)广度优先生成树:
- 对于非连通图,每个连通分量的顶点集和走过的边即集一起构成若干生成树,称为生成森林
最小生成树(MST)
典型构造策略思想:贪心算法
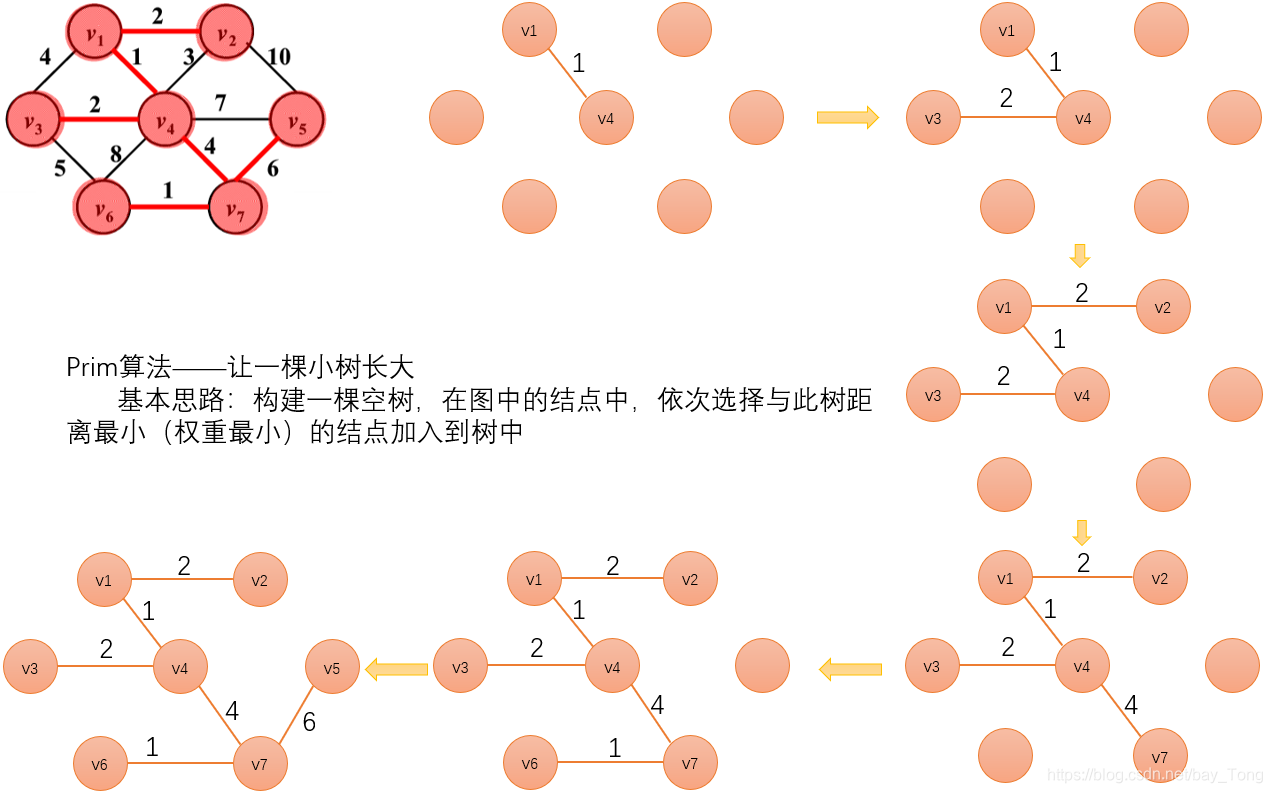
Prim算法
初始化:向空树中添加图的任一顶点
之后循环(重复下列操作至所有顶点被添加):从已添加顶点上选出权值最小的边,并把该边连接的顶点加入(添加顶点不能够重复)
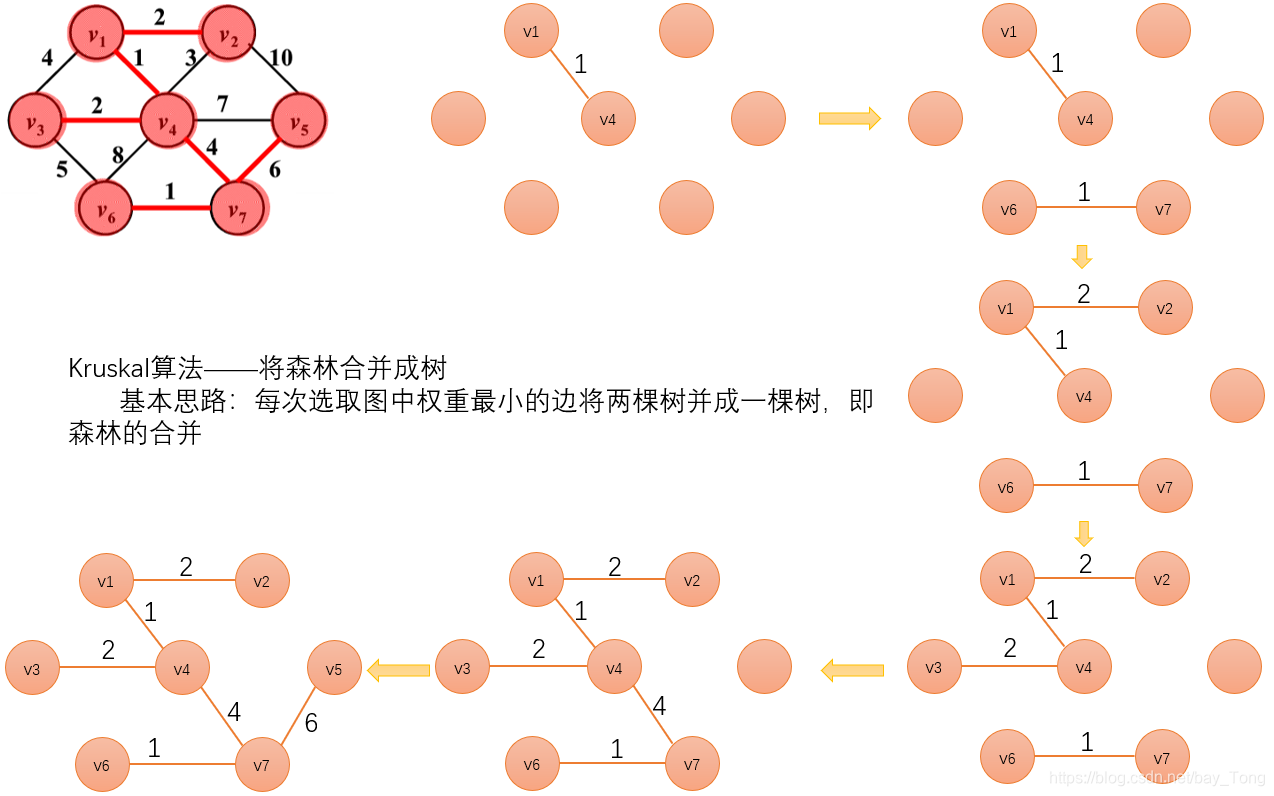
Kruskal算法
每次选取图中权重最小的边将两棵树并成一棵树,即森林的合并
最短路径问题
最短路径:
- 非带权图中:经过的边数最少;
- 带权图中:路径中的边权值之和最小
最短路径问题:
- 单源最短路径问题:给定图、给定一个顶点(源点)计算从源点到所有其它各顶点的最短路径长度
○ 思路:最短路径的子路径也是最短路径
○ 无权图的单元最短路算法:BFS算法
○ 有权图的单源最短路算法:Dijkstra算法
从源点出发(设为集合S),每一次从其它顶点集合(U)中按最短路径长度递增的次序依次把U中顶点加入S中,直至全部顶点都加入到S中,算法结束 - 所有点对的最短路径问题:求所有顶点之间的最短路径和最短距离
○ 方法一:重复调用Dijkstra算法
○ 方法二:floyd算法(递归关系的建立,用一个矩阵存顶点到其它顶点的距离)
拓扑排序与关键路径
相关概念:
- DAG图:有向无环图
- AOV网:顶点表示活动,有向边表示活动先后关系
- 拓扑序列:设图G=(V,E)为有n个顶点的有向图,若从Vi到Vj有一条路径且有明确的先后顺序,则这条路径上的顶点序列V1,V2….为拓扑序列
- 拓扑排序:找到一个有向图的拓扑序列的过程
(1)若AOV网中不存在回路,则所有活动可拍成一个线性序列,且有明确的先后关系(每个活动的所有前驱活动均在该活动之前),则该序列为拓扑序列
(2)拓扑序列不唯一
(3)AOV网不一定都有拓扑序列
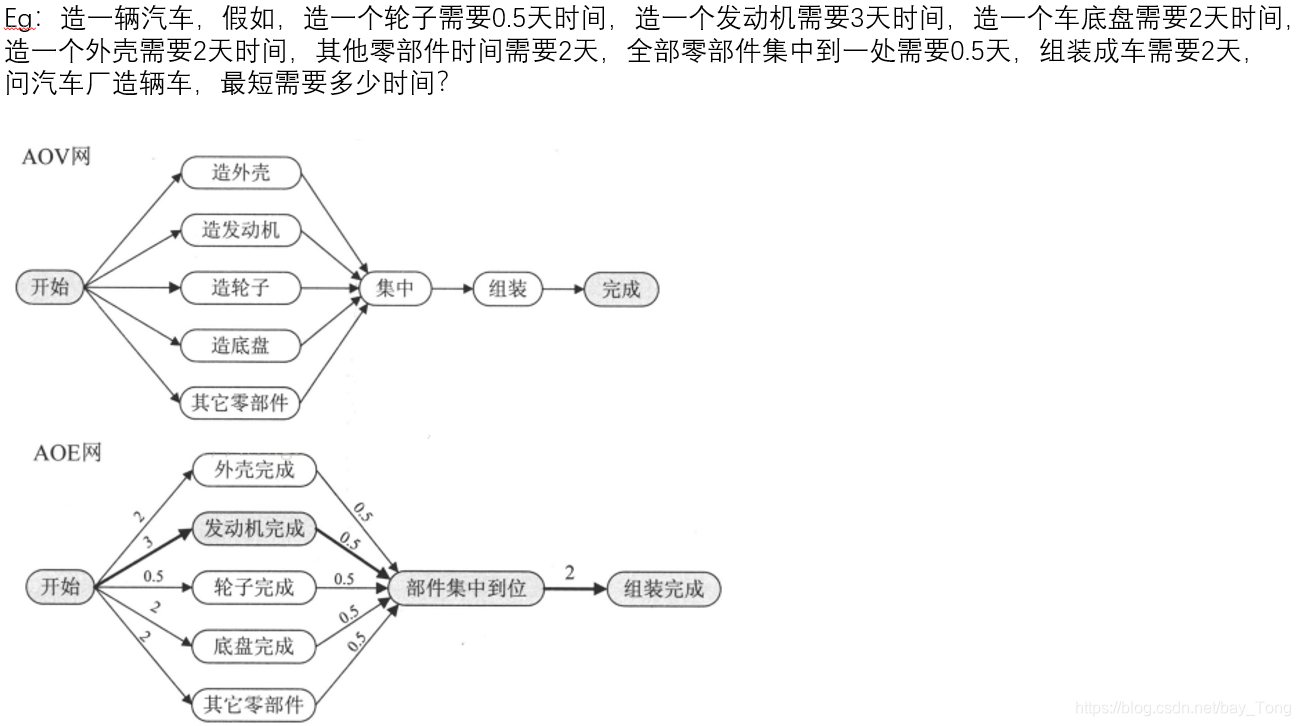
(4)拓扑序列的实际意义:按照拓扑序列中的顶点次序进行每一项活动,可保证整个工程顺利进行 - AOE网:顶点表示时间,弧表示活动,弧的权值表示活动所需要的时间
求拓扑排序思路:
- 在AOV网中选一个没有直接前驱的顶点并输出
- 从图中删去该顶点同时删去所有它发出的有向边
- 重复以上步骤
(1)若全部顶点均已输出则拓扑排序完成
(2)若图中还有未输出的顶点但已跳出处理循环,则AOV网中必定存在有向环,无法得到拓扑序列
关键路径:从源点到汇点的最长路径的长度,即完成整个工程任务所需的时间
关键活动:关键路径上的活动
求关键路径:松弛时间(时间余量)为0的活动为关键活动
- 对图中顶点进行拓扑排序,排序过程中求出每个事件的最早发生时间
- 按逆拓扑序列求每个事件的最晚发生时间
- 最早开始时间和最晚发生时间相同的活动即为关键活动
基本操作集汇总(代码实现)
【此部分是为将理论进行实践检验理论知识理解程度而进行的C语言代码实现汇总,在C++语言中的STL标准模板库有专门的头文件、数据结构及相关函数操作集的集成可直接进行调用】
【为了方便调用,采用多文件编程方式,代码已基本完成,实际使用时依据题目实际情况进行直接调用或简单修改后调用,算法的健壮性有待进一步测试,后续会持续对代码进行完善和优化】
【此部分的遍历等操作会用到栈结构与队列结构,栈与队列的基本工作原理及其基本操作集等详细见本栏文章《栈和队列总结——基本知识要点汇总》】
图的邻接矩阵存储基本操作集(C语言实现)
Graph.h文件
#pragma once
#ifndef GRAPH
#define GRAPH
#define false 0
#define true 1
#define INF_MAX 65533
#define ERROR -1
/*邻接矩阵法*/
typedef int WeightType;//权重类型
typedef int DataType;//数据类型
typedef int Vertex;//顶点类型
typedef struct GNode* Graph;//图结构体
typedef struct ENode* Edge;//边结构体
struct GNode {
//int vexnum;
int edgenum;
int maxVexnum;
WeightType** G;
DataType* Data;
};
struct ENode {
Vertex v1, v2;
WeightType weight;
};
extern int* visit;
Graph CreateGraph(int maxVexnum);//建立初始图
void InsertEdge(Graph G, Edge e);//插入弧
Graph BuildGraph();//构建完整图
void DFSTravers(Graph G);//深度遍历
void DFS(Graph G, Vertex v);//深度遍历递归子程序
void BFS(Graph G);//广度遍历
int nodeDegree(Graph G, Vertex v);//求结点的度
void findConnect(Graph G, Vertex v);//就结点的邻接点
void ShortestPath(Graph G, Vertex v, int Dist[]);//计算G中顶点v到其它点的最短距离
void MST_Prim(Graph G);//最小生成树
#endif // !GRAPH
Graph.c文件
#include"Graph.h"
#include"Queue.h"
#include<stdio.h>
#include<stdlib.h>
#include<memory.h>
int* visit;
//建立初始图
Graph CreateGraph(int maxVexnum) {
int i = 0, j = 0;
Graph G = (Graph)calloc(1, sizeof(struct GNode));
if (!G) {
perror("error\n"); exit(1); }
if (maxVexnum <= 0) {
printf("输入有误\n"); free(G); return; }
G->maxVexnum = maxVexnum;
G->Data = (DataType*)calloc(maxVexnum, sizeof(DataType));
G->G = (WeightType**)calloc(maxVexnum, sizeof(WeightType*));
if (!G->Data || !G->G) {
perror("error\n"); exit(1); }
for (i = 0; i < maxVexnum; i++) {
G->G[i] = (WeightType*)calloc(maxVexnum, sizeof(WeightType));
if(!G->G[i]){
perror("error\n"); exit(1); }
for (j = 0; j < maxVexnum; j++) {
G->G[i][j] = INF_MAX;
}
}
return G;
}
//插入结点
//void InsertVertex(Graph G, Vertex v) {
//}
//插入弧
void InsertEdge(Graph G, Edge e) {
if (e->v1 >= 0 && e->v1 < G->maxVexnum&&e->v2 >= 0 && e->v2 < G->maxVexnum) {
G->G[e->v1][e->v2] = e->weight;
/*若为无向图*/
G->G[e->v2][e->v1] = e->weight;
}
else {
printf("Insert_error\n"); return; }
}
//构建完整图
Graph BuildGraph() {
int i = 0;
int maxVexnum = 0;
Graph G;
Edge E;
printf("输入要创建的图中顶点最大个数:");
scanf("%d", &maxVexnum);
G = CreateGraph(maxVexnum);
for (i = 0; i < maxVexnum; i++) {
printf("输入顶点的data:");
scanf("%d", &G->Data[i]); fflush(stdin);
}
printf("输入要创建的图中边的条数:");
scanf("%d", &G->edgenum);
if (G->edgenum > 0) {
E = (Edge)calloc(1, sizeof(struct ENode));
if (!E) {
perror("error\n"); exit(1); }
for (i = 0; i < G->edgenum; i++) {
printf("输入边的两个邻接点以及边的权重:");
scanf("%d%d%d", &E->v1, &E->v2, &E->weight); fflush(stdin);
InsertEdge(G, E);
}
free(E);
}
else if (G->edgenum < 0) {
printf("Input_error\n");
free(G->Data);
for (i = 0; i < G->maxVexnum; i++) {
free(G->G[i]); }
free(G); return NULL;
}
return G;
}
//深度遍历
void DFSTravers(Graph G) {
Vertex v = 0;
visit = (int*)calloc(G->maxVexnum, sizeof(int));
if (!visit) {
perror("error\n"); exit(1); }
for (v = 0; v < G->maxVexnum; v++) {
DFS(G, v); }
free(visit);
}
//深度遍历递归子程序
void DFS(Graph G, Vertex v) {
Vertex i;
if (visit[v] == false) {
visit[v] = true;
printf(" %d", G->Data[v]);
}
for (i = 0; i < G->maxVexnum; i++) {
if (G->G[v][i] != INF_MAX) {
if (visit[i] == false) {
DFS(G, i);
}
}
}
}
//广度遍历
void BFS(Graph G) {
Vertex v = 0, i = 0;
Queue Q = CreateQueue(G->maxVexnum);
visit = (int*)calloc(G->maxVexnum, sizeof(int));
if (!visit) {
perror("error\n"); exit(1); }
for (v = 0; v < G->maxVexnum; v++) {
if (visit[v] == false) {
visit[v] = true; printf(" %d", G->Data[v]);
AddQ(Q, v);
if (!IsEmptyQ(Q)) {
v = DeleteQ(Q);
for (i = 0; i < G->maxVexnum; i++) {
if (G->G[v][i] != INF_MAX) {
if (visit[i] == false) {
visit[i] = true; printf(" %d", G->Data[i]);
AddQ(Q, i);
}
}
}
}
}
}
free(visit);
free(Q);
}
//求结点的度
int nodeDegree(Graph G, Vertex v) {
Vertex i = 0;
int degree = 0;
if (v < 0 || v >= G->maxVexnum) {
printf("Find_error\n"); return ERROR; }
for (i = 0; i < G->maxVexnum; i++) {
if (G->G[v][i] != INF_MAX) {
degree++;
}
if (G->G[i][v] != INF_MAX) {
degree++;
}
}
return degree;
}
//就结点的邻接点
void findConnect(Graph G, Vertex v) {
if (v < 0 || v >= G->maxVexnum) {
printf("Find_error\n"); return; }
Vertex i = 0;
visit = (int*)calloc(G->maxVexnum, sizeof(int));
if (!visit) {
perror("error\n"); exit(1); }
for (i = 0; i < G->maxVexnum; i++) {
if (G->G[v][i] != INF_MAX) {
printf(" %d", G->Data[i]);
visit[i] = true;
}
if (G->G[i][v] != INF_MAX && visit[i] == false) {
printf(" %d", G->Data[i]);
}
}
free(visit);
}
//计算G中顶点v到其它点的最短距离,待完善……
void ShortestPath(Graph G, Vertex v, int Dist[]) {
}
//最小生成树,待完善……
void MST_Prim(Graph G) {
}
图的邻接表存储基本操作集(C语言实现)
Graph_adj.h文件
#pragma once
#ifndef GRAPH_ADJ
#define GRAPH_ADJ
#define true 1
#define false 0
#define ERROR -1
typedef void* ElementType;
typedef struct VNode_adj* Vertex_adj;//结点
typedef struct GNode_adj* Graph_adj;//图
typedef struct ENode_adj* Edge_adj;//边
/*邻接表法*/
struct VNode_adj {
int position;//数组下标
ElementType data;//顶点数据
Edge_adj first;//指向第一条弧
};
struct ENode_adj {
int v1, v2;//边的邻接点的位置
int weight;//边的权重
Edge_adj next;//下一邻接点
};
struct GNode_adj {
Vertex_adj Vlist;//邻接表
int vexnum, edgenum;//顶点数、弧数
int vlength;
};
extern int* visit;
Graph_adj CreateGraph_adj(int vexnum);//建立初始图
void InsertVertex_adj(Graph_adj G, Vertex_adj v);//插入结点
void InsertEdge_adj(Graph_adj G, Edge_adj e);//插入弧
Graph_adj BuildGraph_adj();//构建完整图
void DFSTravers_adj(Graph_adj G);//深度遍历
void DFS_adj(Graph_adj G, Vertex_adj V);//深度遍历递归子程序
void BFS_adj(Graph_adj G);//广度遍历
int nodeDegree_adj(Graph_adj G, Vertex_adj v);//求结点的度
void findConnect_adj(Graph_adj G, Vertex_adj v);//求结点的邻接点
void ShortestPath_addj(Graph_adj G, Vertex_adj v, int Dist[]);//计算G中顶点v到其它点的最短距离
void MST_adj(Graph_adj G);//最小生成树
#endif // !GRAPH_ADJ
Graph_adj.c文件
#include"Graph_adj.h"
#include"Queue.h"
#include<stdio.h>
#include<stdlib.h>
#include<memory.h>
int* visit;
//建立初始图
Graph_adj CreateGraph_adj(int maxVexnum) {
Graph_adj G = (Graph_adj)calloc(1, sizeof(struct GNode_adj));
if (!G) {
perror("error\n"); exit(1); }//建立图
if (maxVexnum <= 0) {
printf("输入有误\n"); free(G); return; }
G->vexnum = maxVexnum;
G->Vlist = (Vertex_adj)calloc(G->vexnum, sizeof(struct VNode_adj));
if (!(G->Vlist)) {
perror("error\n"); exit(1); }
return G;
}
//插入顶点
void InsertVertex_adj(Graph_adj G, Vertex_adj v) {
if (G->vlength >= G->vexnum) {
printf("图满\n"); return;
}
(G->Vlist[G->vlength]).data = v->data;
(G->Vlist[G->vlength]).first = v->first;
(G->Vlist[G->vlength]).position = v->position;
(G->vlength)++;
}
//插入弧
void InsertEdge_adj(Graph_adj G, Edge_adj e) {
//判断改弧的两个邻接点是否在图中
if (e->v1 >= 0 && e->v1 < G->vexnum&&e->v2 >= 0 && e->v2 < G->vexnum) {
//新建一个弧结点备份
Edge_adj newNode01 = (calloc)(1, sizeof(struct ENode_adj));
if (!newNode01) {
perror("error\n"); exit(1); }
newNode01->v1 = e->v1;
newNode01->v2 = e->v2;
newNode01->weight = e->weight;
//将其插入到图中相应位置
newNode01->next = (G->Vlist[e->v1]).first;
(G->Vlist[e->v1]).first = newNode01;
//若为无向图则重复上述插入过程,仅改变v1v2位置
Edge_adj newNode02 = (calloc)(1, sizeof(struct ENode_adj));
if (!newNode02) {
perror("error\n"); exit(1); }
newNode02->v1 = e->v2;
newNode02->v2 = e->v1;
newNode02->weight = e->weight;
//将其插入到图中相应位置
newNode02->next = (G->Vlist[e->v2]).first;
(G->Vlist[e->v2]).first = newNode02;
}
else {
printf("Insert_Error\n"); return; }
}
//构建完整图
Graph_adj BuildGraph_adj() {
int vexnum = 0;
int i = 0;
Graph_adj G;
Edge_adj E;
Vertex_adj v = (Vertex_adj)calloc(1, sizeof(struct VNode_adj));
if (!v) {
perror("error\n"); exit(1); }
printf("输入要创建的图中结点数:");
scanf("%d", &vexnum); fflush(stdin);
G = CreateGraph_adj(vexnum);
for (i = 0; i < G->vexnum; i++) {
printf("输入要创建的图中结点的数据:");
scanf("%d", &v->data); fflush(stdin);
v->first = NULL;
v->position = i;
InsertVertex_adj(G, v);
}
printf("输入要创建的图中边数:");
scanf("%d", &G->edgenum); fflush(stdin);
if (G->edgenum > 0) {
for (i = 0; i < G->edgenum; i++) {
E = (Edge_adj)calloc(1, sizeof(struct ENode_adj));
if (!E) {
perror("error\n"); exit(1); }
E->next = NULL;
printf("依次输入该边的两个邻接点、weight:");
scanf("%d%d%d", &(E->v1), &(E->v2), &(E->weight)); fflush(stdin);
//E->v1--; E->v2--;
InsertEdge_adj(G, E);
}
free(E);
}
if (G->edgenum < 0) {
printf("输入有误\n");
free(G); free(G->Vlist);
return NULL;
}
return G;
}
//深度遍历
void DFSTravers_adj(Graph_adj G) {
int i = 0;
visit = (int*)calloc(G->vexnum, sizeof(int));
if (!visit) {
perror("error\n"); exit(1); }
for (i = 0; i < G->vexnum; i++) {
DFS_adj(G, &G->Vlist[i]); }
free(visit);
}
//深度遍历递归子程序
void DFS_adj(Graph_adj G,Vertex_adj v) {
Edge_adj E = v->first;
if (visit[v->position] == false) {
visit[v->position] = true;
printf(" %d", v->data);
}
while (E) {
if (visit[E->v2] == false) {
DFS_adj(G, &G->Vlist[E->v2]);
}
E = E->next;
}
}
//广度遍历
void BFS_adj(Graph_adj G) {
visit = (int*)calloc(G->vexnum, sizeof(int));
if (!visit) {
perror("error\n"); exit(1); }
Queue Q = CreateQueue(G->edgenum * 2);
Vertex_adj V;
Edge_adj E;
int i = 0;
for (i = 0; i < G->vexnum; i++) {
if (visit[i] == false) {
visit[i] = true; printf(" %d", G->Vlist[i].data);
AddQ(Q, &G->Vlist[i]);
}
if (!IsEmptyQ(Q)) {
V = DeleteQ(Q);
E = V->first;
while (E) {
if (visit[E->v2] == false) {
visit[E->v2] = true; printf(" %d", G->Vlist[E->v2].data);
AddQ(Q, &G->Vlist[E->v2]);
}
E = E->next;
}
}
}
free(visit);
free(Q);
}
//求结点的度
int nodeDegree_adj(Graph_adj G, Vertex_adj v) {
if (v < 0 || v >= G->vexnum) {
printf("Find_error\n"); return ERROR; }
Edge_adj E;
int i = 0;
int degree = 0;
for (i = 0; i < G->vexnum; i++) {
E = G->Vlist[i].first;
while (E) {
if (E->v1 == v || E->v2 == v) {
degree++;
}
E = E->next;
}
}
return degree;
}
//就结点的邻接点
void findConnect_adj(Graph_adj G, Vertex_adj v) {
if (v < 0 || v >= G->vexnum) {
printf("Find_error\n"); return ERROR; }
Edge_adj E;
int i = 0;
visit = (int*)calloc(G->vexnum, sizeof(int));
if (!visit) {
perror("error\n"); exit(1); }
for (i = 0; i < G->vexnum; i++) {
E = G->Vlist[i].first;
while (E) {
if (E->v1 == v || E->v2 == v) {
if (visit[E->v2] == false && E->v2 != v) {
visit[E->v2] = true;
printf(" %d", G->Vlist[E->v2].data);
}
if (E->v2 == v) {
break; }
}
E = E->next;
}
}
free(visit);
}
//计算G中顶点v到其它点的最短距离,待完善……
void ShortestPath_adj(Graph_adj G, Vertex_adj v, int Dist[]) {
}
//最小生成树,待完善……
void MST_adj(Graph_adj G) {
}
持续更新中……
我是桐小白,一个摸爬滚打的计算机小白