教材使用《程序设计语言编译原理》-3版,作者:陈火旺、刘春林等。
用自己的话把教材上的例题复现了一遍,如有不足,请指教。
NFA :非确定有限自动机;
DFA :确定有限自动机;
正规式转NFA
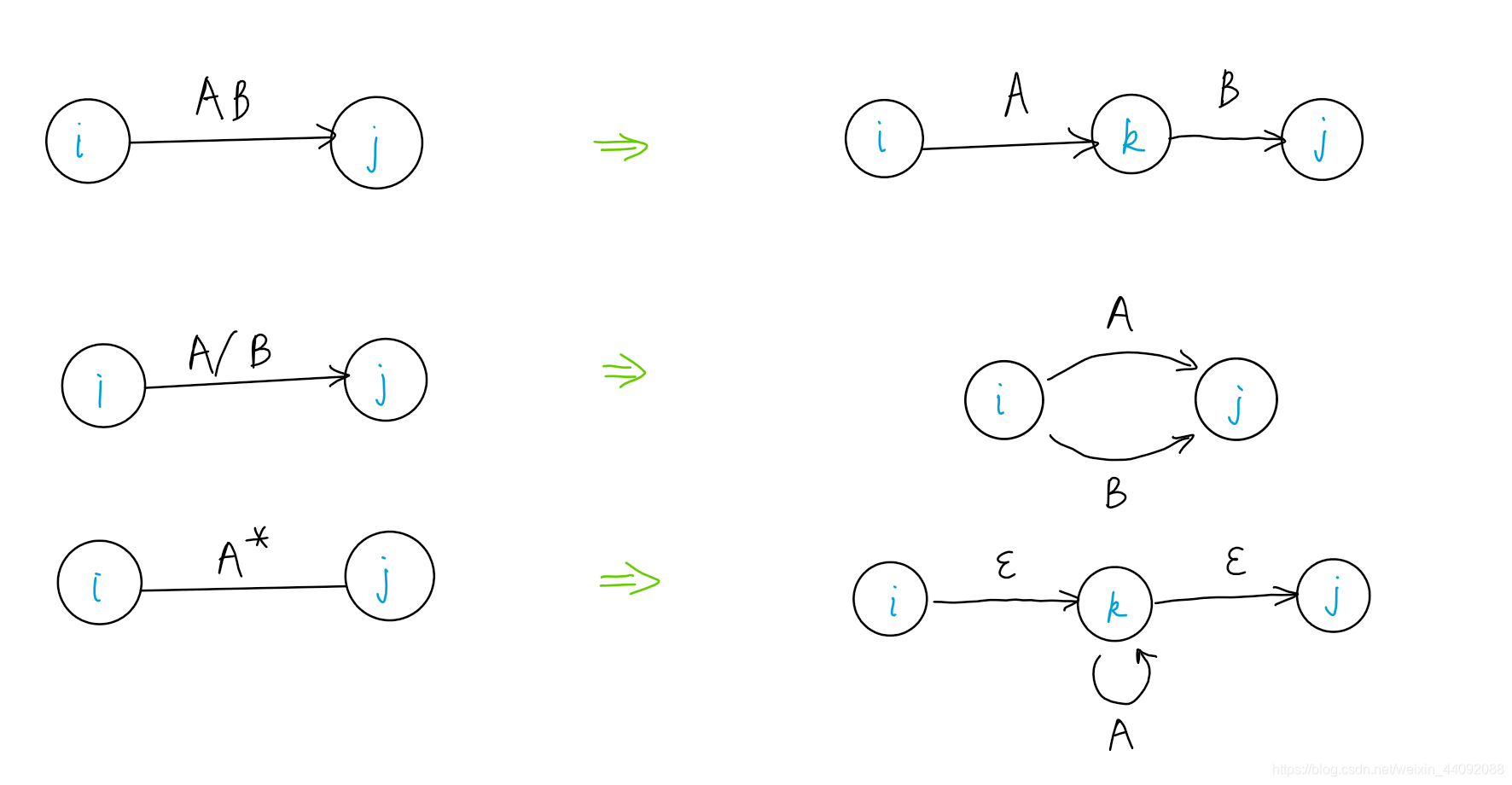
就这么简单。。。
NFA -> DFA
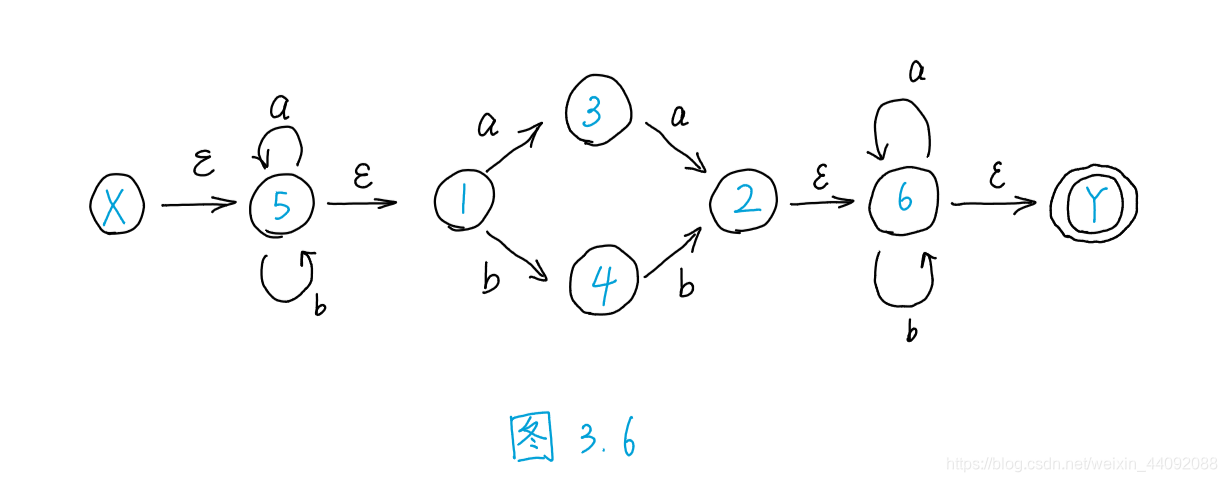
图3.6 非确定有限自动机
涉及到课本 P49~P50 讲解的子集法——把 NFA 确定为 DFA 的方法。(下面再解释解释)
定义
- M : NFA
- M’ : 最终得到的 NFA
- M’’ : DFA
假定 I 是 M’ 的状态集的子集, - ε_CLOSURE(I) : 由 ε 弧连接起来的一个连通分量
I 的 ε 闭包,包括 I 本身,也包括从其中任意一个状态元素 q 通过任意条 ε 弧可以到达的状态 q’;
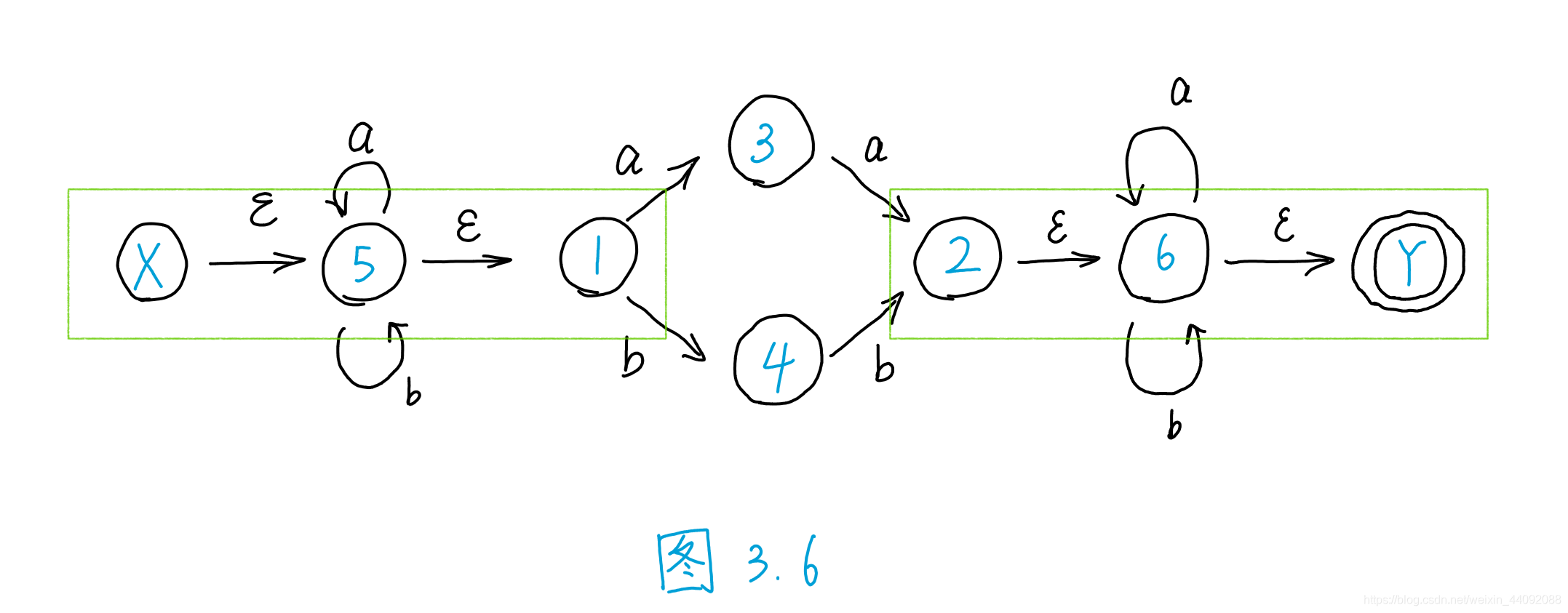
图3.6 举例:像 ε_CLOSURE({X}) = {X, 5, 1}, ε_CLOSURE({2}) = {2, 6, Y},
就是由 ε 弧连接起来的一个连通分量; - Ia : 由 a 弧连接起来的一个连通分量
Ia = ε_CLOSURE(J),J 中的状态 q’ 是从 I 中任意一个状态 q 通过一条 a 弧可以达到的状态,同时不要忘记通过任意条 ε 弧 到达的状态;
图3.6 举例 : {5, 3, 1}a = {5, 3, 1, 2, 6, 7},
分析过程:
| 原状态 | 通过 a 弧到达的状态 |
|---|---|
| 5 | 5 |
| 3 | 2 |
| 1 | 3 |
得到状态集合:{5, 3, 2};
| 原状态 | 通过 ε 弧到达的状态 |
|---|---|
| 5 | 1 |
| 3 | \ |
| 2 | 6, Y |
最后得到状态集合:{5, 3, 1, 2, 6, 7};
注意,每个状态,特别是终态,都可以看作有一条 ε 弧连接自己,所以终态只能读取 ε,其它的读取不了。上面有些状态集合里含有终态 Y ,是由前面的状态通过 ε 弧达到的。
例3.3 NFA 转换为 DFA
正规式 (a|b)*(aa|bb)(a|b)* 对应的 NFA 如图 3.6 所示,其中 X 为初态,Y 为终态。按照上述过程(子集法)构造出来的状态转换矩阵见表 3.3
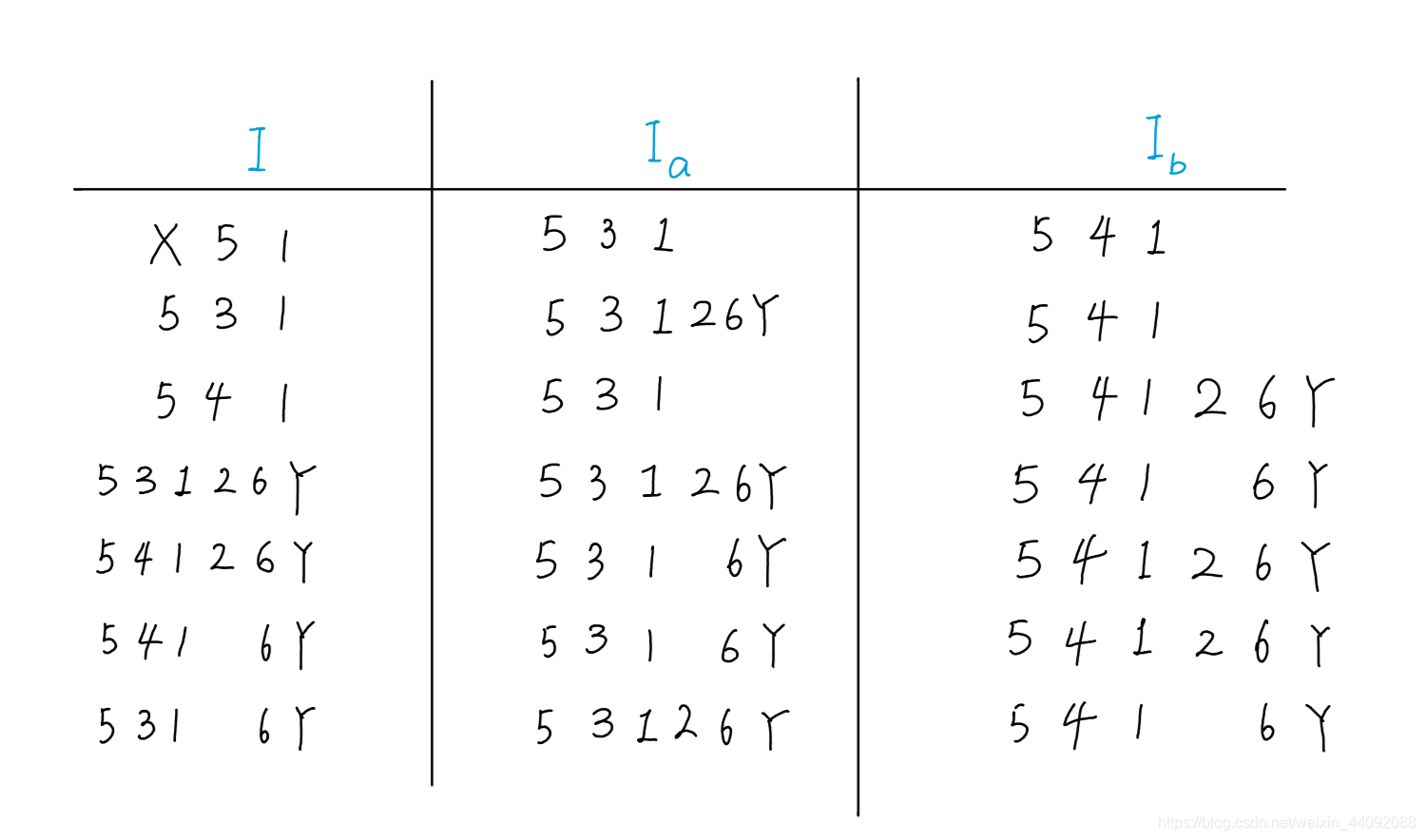
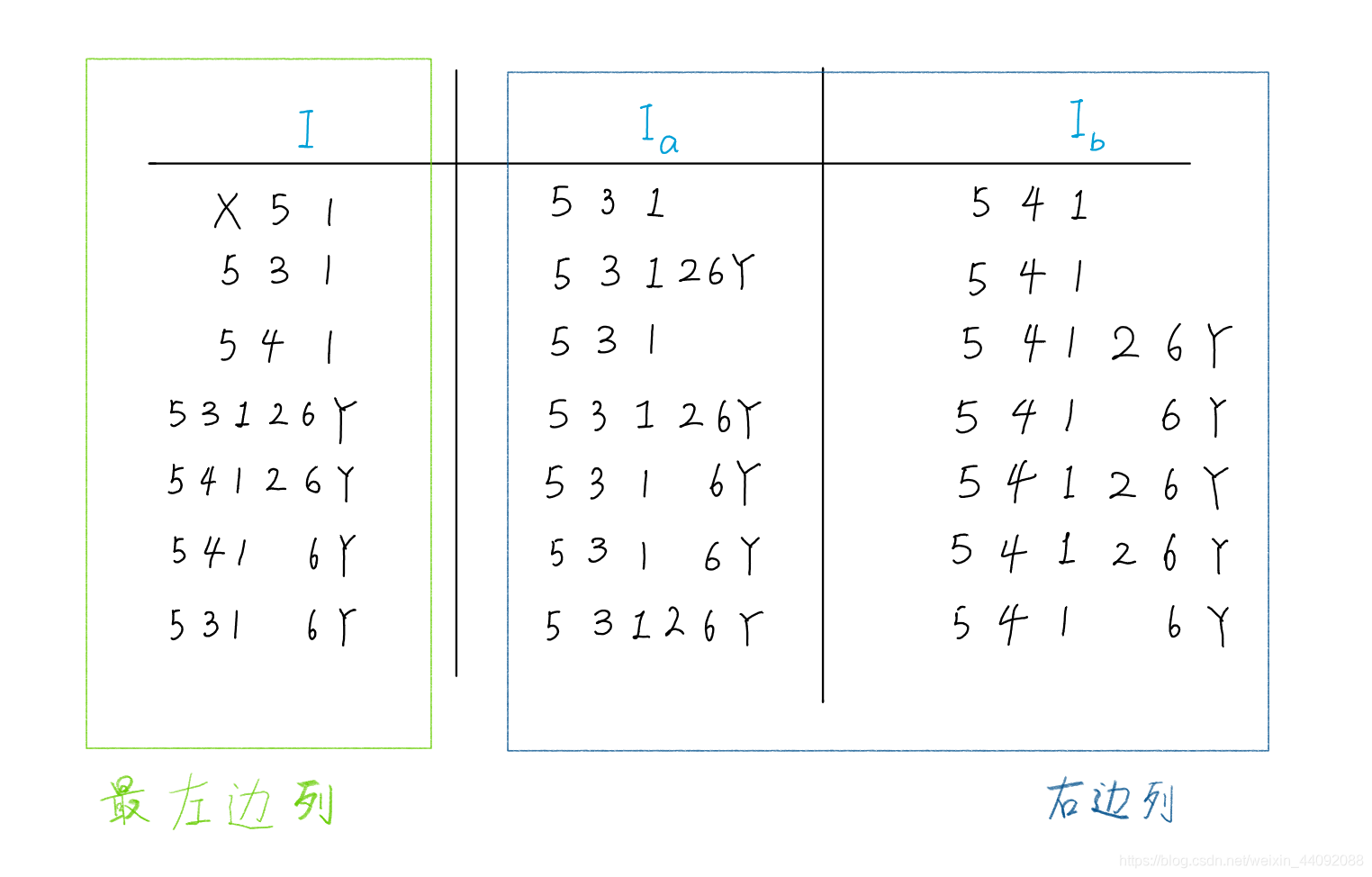
表 3.3 对应于例 3.3 中正规式的状态转换矩阵
构造过程
把初始状态 X 的 ε 闭包,即 ε_CLOSURE({X}), 现在记为 I,放在第一行第一列,求出Ia, Ib,将出现在右边列(除最左边一列外的所以列),但是没有出现在最左边列的状态集合,添加到最左边列中,重复操作,直到右边列中出现的所有状态集都在最左边列出现过。
重新命名
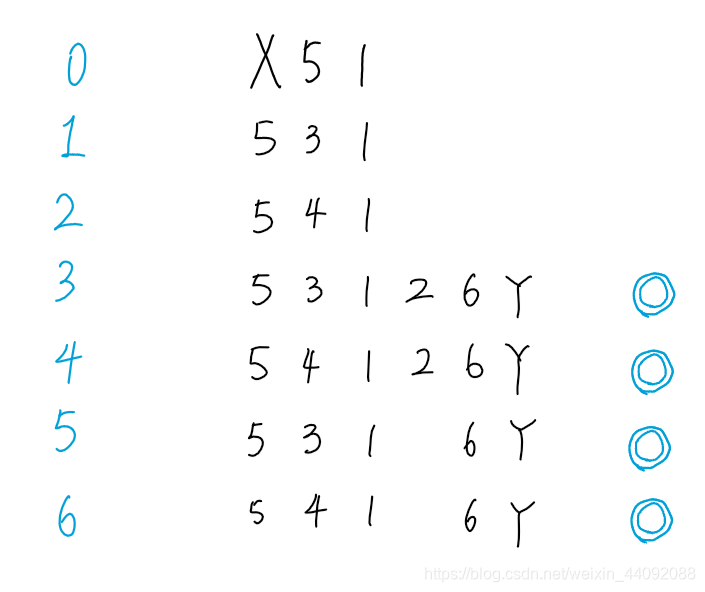
对表 3.3 中的所有状态子集重新命名,其中含有原终态 Y 的新状态也是终态,标记上双圆圈,得到表 3.4 所列的状态转换矩阵;
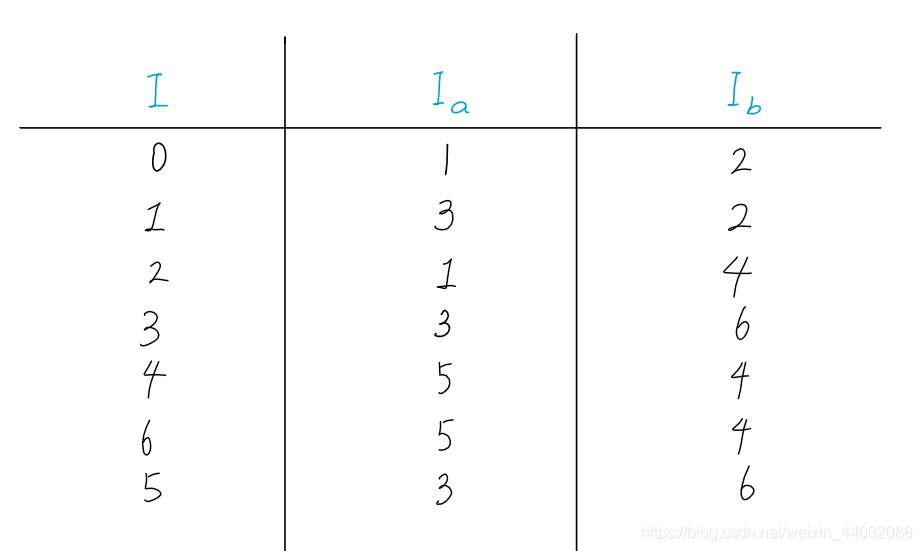
表 3.4 对表 3.3 中状态子集重新命名后的状态转换矩阵
由表 3.4 画出对应的状态图 (图 3.8):
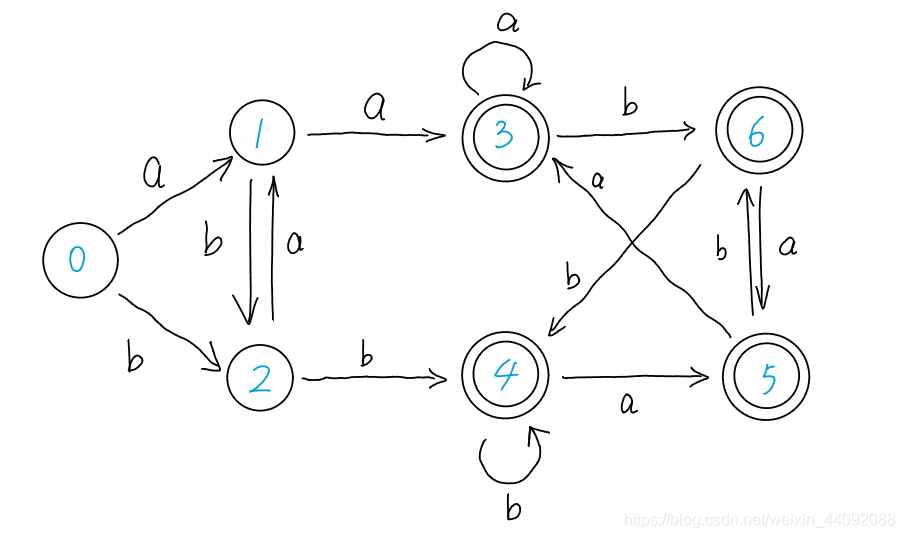
图 3.8 未化简的 DFA
例 3.6 化简 DFA
化简图 3.8 表示的 DFA;
首先把 M 的状态分成两组 :终态组,非终态组;
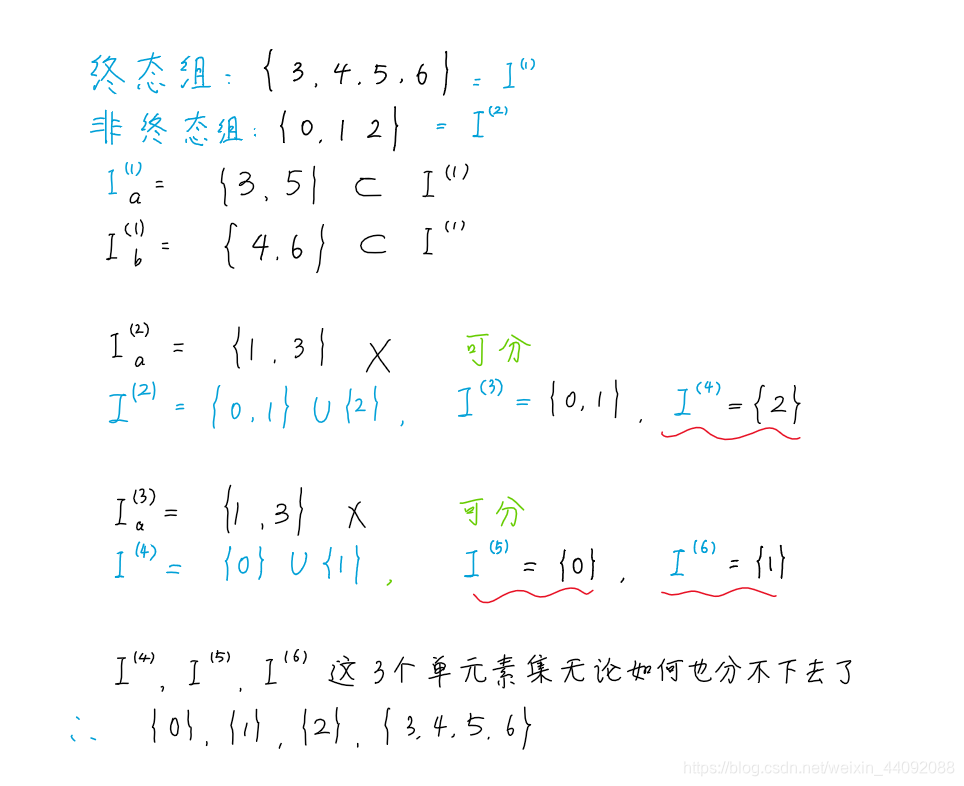
得到化简后的图像 (图 3.5):
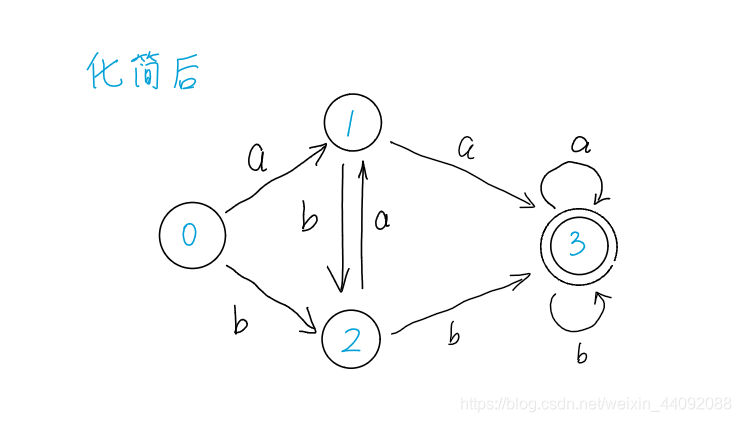
图 3.5 状态转换图