实验的时候是在ROS下进行标定的,之前写过,最近发现MATLAB标定工具导出来的图是在最适合不过写论文了,就重新做了一遍
1.应用程序里找到Camera Calibration工具箱
 2.加载待标定的图像 除了2之外的都勾上
2.加载待标定的图像 除了2之外的都勾上
 3.填写棋盘格每个格子边长的真实值
3.填写棋盘格每个格子边长的真实值
4.可以预览成功检测出棋盘格的图像,然后开始标定,点击Calibrate
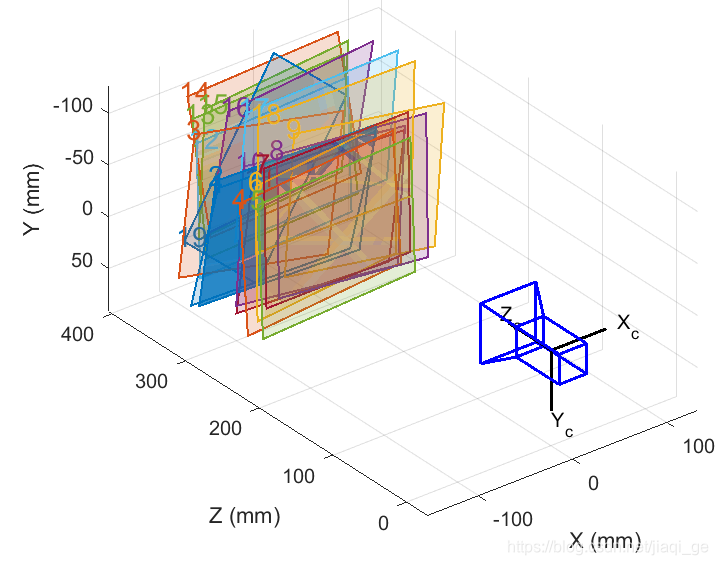 因为我的照片是当时在ros下标定时的采样,导致平均误差太大了都达到0.75,至少在0.5以下,所以还得重新采样
因为我的照片是当时在ros下标定时的采样,导致平均误差太大了都达到0.75,至少在0.5以下,所以还得重新采样
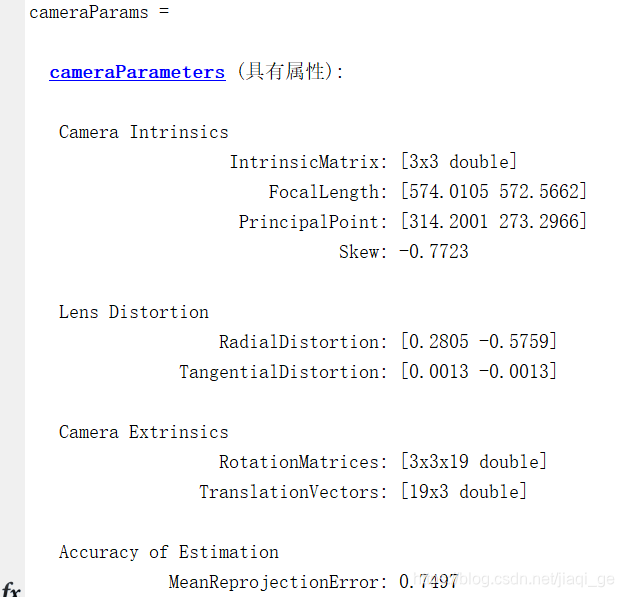
5.导出相机标定参数
 查看相机属性
查看相机属性
Matlab-2016深度相机标定
猜你喜欢
转载自blog.csdn.net/jiaqi_ge/article/details/103196823
今日推荐
周排行