ZN-K28基于ABB工业机器人的基本实训系统
一、设备介绍
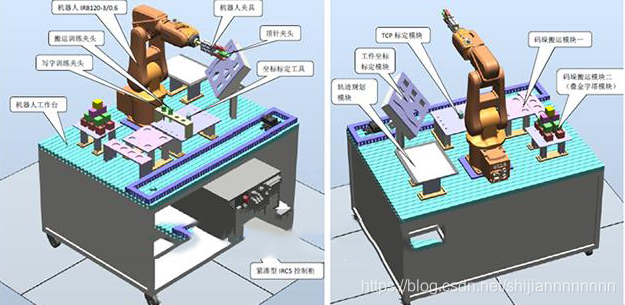
依托该机器人教学平台为载体,学习ABB机器人TCP标定、工件坐标标定、轨迹规划、码垛搬运的相关作业,从而更快更好地掌握ABB机器人的相关应用。
系统说明:
1、实训装置为模块化开放式设计结构,不仅可作为独立的系统单独使用,也可以作为子系统与其它类似设备组合,构成自动化生产线系统,具有功能的可扩展性等优点;
2、各种气动元件、电气元件以及机械运动执行机构的工作过程及运行状态具有直观性;
3、实训装置具有手动和自动控制,通过手动可以检测气缸、气爪等主要器件工作性能是否正常进行检测。
4、个模块由易到难,循序渐进,使学习者迅速的掌握ABB 机器人基本操作及使用技巧。
TCP 标定模块模块说明:此模块有效地强化了TCP 这个重要程序数据的练习,为以后的机器人学习打下良好的基础,能够实现快速切换到其它的应用模块。
工件坐标标定模块说明:此模块有效地强化了WOBJ 这个重要程序数据的练习,为以后的机器人学习打下良好的基础,能够实现快速切换到其它的应用模块。
轨迹规划模块说明:为机器人提供一个基于平整的写字编程训练平台,通过此平台进行轨迹规划的练习,能够实现快速切换到其它的应用模块。
码垛搬运模块说明:不同形式的码垛训练模块,为机器人提供更全面的搬运码垛训练,其中包括22、41这种典型STACK 算法的切换,以及金字塔堆叠的相关训练,能够实现快速切换到其它的应用模块。
二、设备参数
供电:单相220V,50-60Hz
功率:1kw
外形尺寸:1000mm×800mm×1550mm,
空气质量:3级 DIN ISO 8573-1;
粉尘直径:< 0.005mm;
粉尘含量:< 5mg/m;
油污含量:< 1mg/m;
基于ABB工业机器人的基本实训系统
猜你喜欢
转载自blog.csdn.net/shijiannnnnnnn/article/details/112461073
今日推荐
周排行