文末有考试技巧与考试说明
文章目录
智能移动机器人核心关键技术
- Locomotion 运动
- Mobile Robot Kinematics 运动学
- Perception 感知
- Mobile Robot Localization 定位
- Planning and Navagation 规划和导航
环境地图表示方法
Recognizable Locations 可识别的位置Topological Maps 拓扑图Metric Topological Maps 公制拓扑图Fully Metric Maps (continuos or discrete) 全公制地图- 连续的表示方法
- 连续值地图
- 分解策略
- 精确单元分解:根据几何的临界性,通过选择离散单元之间的边界实现分解。
- 固定分解:环境用栅格描述,将连续的现实环境变成离散近似。(不精确)
- 自适应的单元分解:占有栅格表示方法
- 拓扑分解:形式上,拓扑表示是指定两个对象的图形:节点和这些节点之间的的连接。
智能机器人的运动机构及其优缺点,重点轮式和腿式机器人的优缺点
轮式
优点
相比较腿式和履带式,
- 运动更快
- 消耗的能量较少
- 从控制的角度,由于其简单的机械结构和较好的稳定性,相对较为容易控制
缺点
- 在粗糙地形环境、不平整的地面应用起来较为困难。
腿式
优点
- 在粗糙地形上的自适应性和机动性
- 只要行走机器人的步距大于洞穴的宽度,就能跨越洞穴或者裂口
- 能用高度的技巧来操纵环境中的物体
缺点
- 动力和机械的复杂性
- 包含多个自由度(才能在多个不同方向给予力实现高度机动性)
- 必须能支撑机器人部分总重量
- 能够抬高和放低机器人
几种常见轮子类型,特点,和自由度数目
| 标准轮 | 小脚轮 | 瑞典轮 | 球体轮 | |
|---|---|---|---|---|
| 自由度 | 2 | 2 | 3 | |
| 特点 | 围绕轮轴(电动的)和接触点转动 | 围绕轮轴,接触点和脚轮轴旋转(课本:围绕偏移的操纵接合点旋转) | 围绕轮轴(电动的)、辊子和接触点旋转 | 技术上实现困难 |
| 标准轮 | 小脚轮 | 瑞典轮 | 球体轮 | |
|---|---|---|---|---|
| 自由度 | 2 | 2 | 3 | |
| 特点 | 轮轴、地面接触点 | 轮轴、地面接触点、结合点 | 轮轴、辊轴和地面接触点 | 地面接触点、底盘平面上自由运动 |
- 全向轮和麦轮对系统没有约束
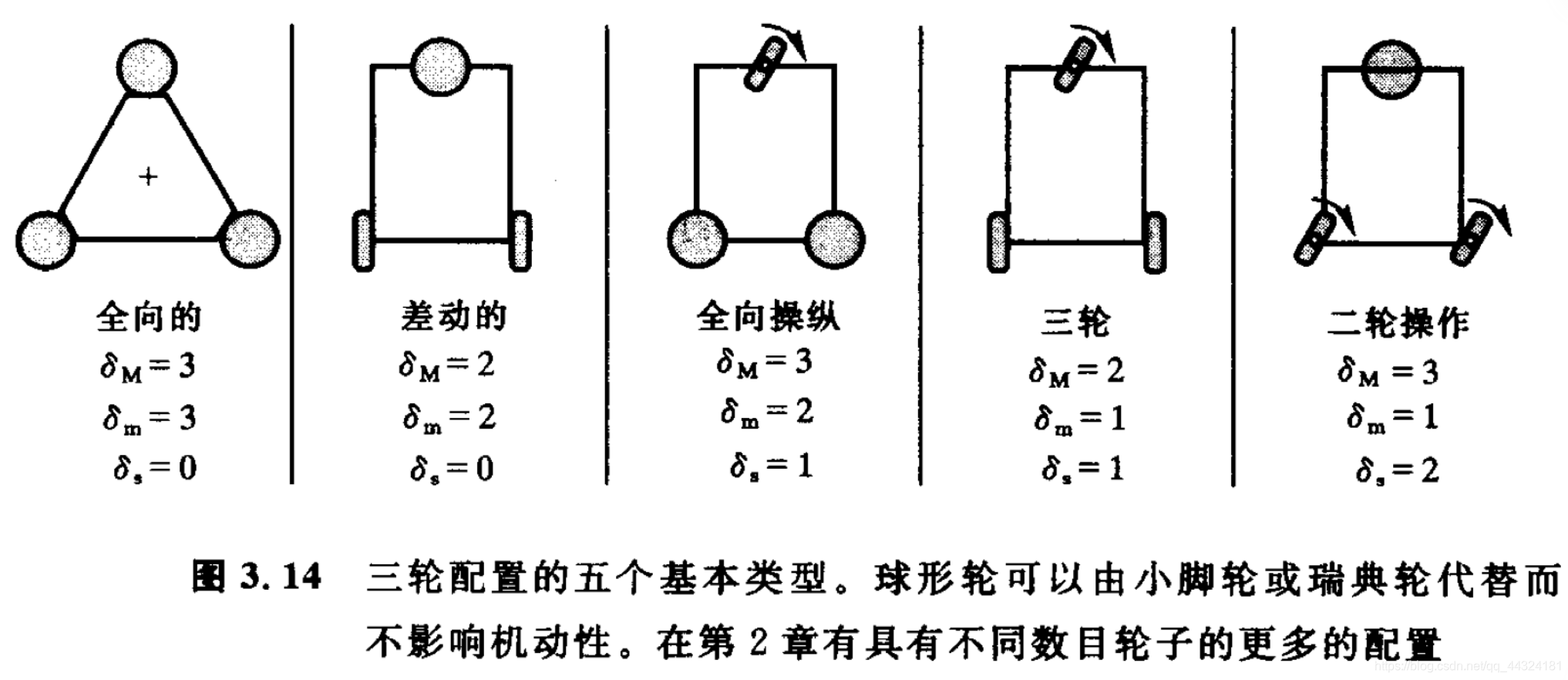
移动机器人机动性概念、典型轮式机器人机动性判定
- 机动程度 δ M = δ m + δ s \delta_{M}=\delta_{m}+\delta_{s} δM=δm+δs
- δ m \delta_{m} δm:活动性程度
- δ s \delta_{s} δs:可操纵度
机器人是完整性还是非完整性系统判断
- 完整性:对于移动机器人,特指机器人地盘的运动学约束
- 完整机器人:没有任何非完整运动学约束的机器人;
- 非完整机器人:存在一个或者多个非完整运动学约束的机器人(又称非可积系统);
- 完整运动学约束:可以明确地表示为仅包含位置变量的函数;
- 非完整运动学约束:需要微分关系,并且无法通过积分得到一个只包含位置变量的约束。
- 非完整系统
- 仅依靠测量每个轮子所走的距离无法得到小车的最终位置;
- 还需要轮子所走的轨迹信息,即与时间相关。
- 移动机器人的完整性
- 可以基于机器人可移动度和工作空间自由度之间的关系来描述完整机器人
- 一个机器人是完整的,当且仅当 D D O F = D O F DDOF=DOF DDOF=DOF
- 通常意义上,一个机器人是完整的,机器人的可移动度等于工作空间自由度。
- 分析一下机器人系统是否为完整系统
- 差速驱动移动机器人:完整系统。另一种描述完整机器人的方法是基于机器人的微分自由度和它的工作空间自由度之间的关系:一个机器人是完整的,当且仅当 DDOF=DOF。直觉上,这是因为只有通过非完整约束,机器人才能获得一个自由度超过微分自由度的工作空间,DOF>DDOF(例子包括差动驱动和二轮\三轮结构)。
- 自行车地盘:操纵系统锁定,变成两个固定轮的自行车是完整的;锁定的自行车是第一种类型的完整机器人的一个例子——存在约束,但都是完整的运动学约束。
- 全方位移动机器人:是一个DDOF=DOF=3的完整机器人。
- 可以基于机器人可移动度和工作空间自由度之间的关系来描述完整机器人
移动机器人传感器分类及其特点
- What 分类
| 本体感受传感器 | 外感受传感器 |
|---|---|
| 测量系统内部的值 | 来自机器人环境的信息 |
- How 分类
| 被动传感器 | 主动传感器 |
|---|---|
| 测量来自环境的能量,受环境影响大 | 放出适当的能量,测量反应;性能较好,但对环境有一定的影响 |

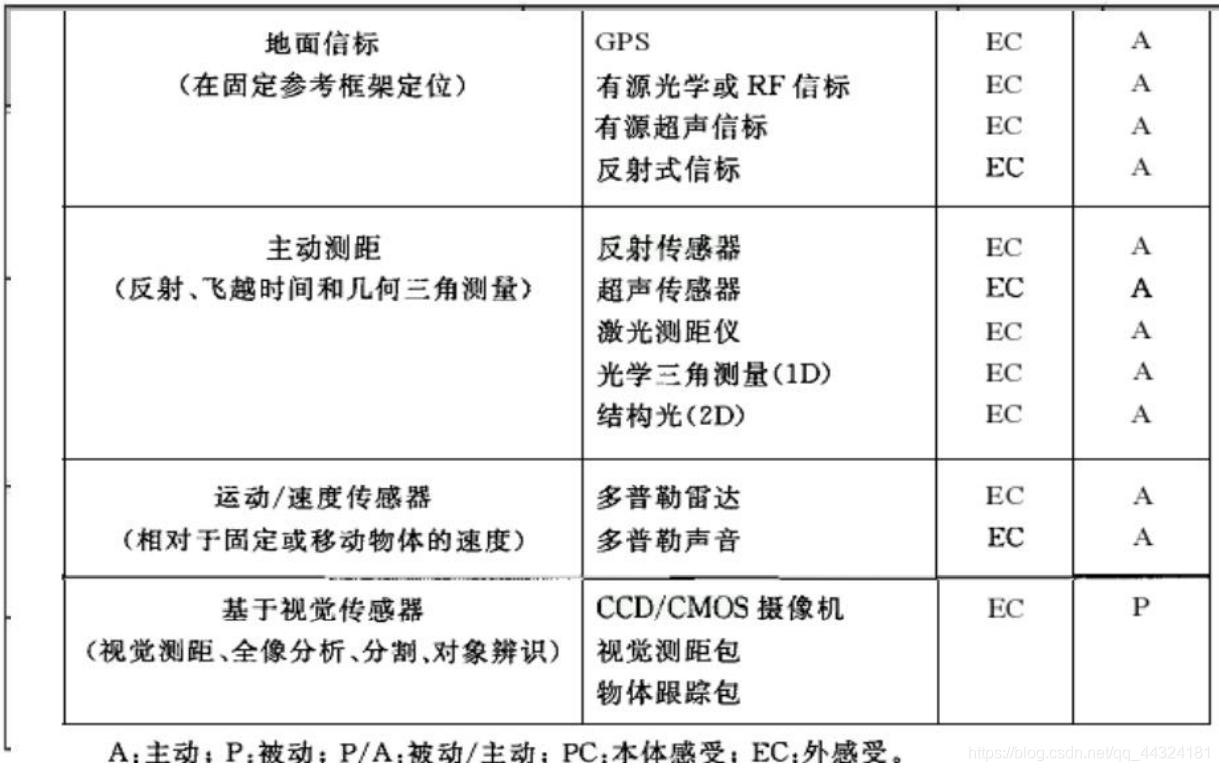
常用本体感受式传感器和外感受传感器
见上表
引起移动机器人定位误差的主要来源
- 传感器噪声:外部环境、传感器本身测量原理
- 传感器混叠:传感器读数的非唯一性
- 执行器噪声
- 环境建模不完整
- 里程计位置估计误差
基于概率地图定位方法的思想和原理
- 关键思想:用概率理论表示不确定性:概率机器人学不是给出当前机器人配置的单一最佳估计,而是将机器人配置表示为所有可能机器人姿势的概率分布,这种可能性叫信任度。
马尔可夫定位
未写
卡尔曼滤波定位
未写
Markov localization和Kalman filter localization优缺点比较
| 马尔可夫定位 | 卡尔曼滤波定位 | |
|---|---|---|
| 优点1 | 从任何位置位置开始定位 | 跟踪机器人,天生非常精确和高效 |
| 优点2 | 从模棱两可的情况中恢复 | |
| 缺点 | 为了随时更新整个状态空间内所有位置的概率,需要对空间进行离散表示。因此,如果使用精细网格,所需的内存和计算能力就变得非常重要 | 如果机器人的不确定性变得很大(例如与物体发生碰撞),卡尔曼滤波器将失效,位置最终丢失 |
粒子滤波定位的基本原理
- Idea:用随机样本表示置信度
- 非高斯非线性过程的估计
- 蒙特卡罗滤波器,适者生存,凝聚,自举滤波器
粒子滤波算法
- 使用建议分布为下一代粒子采样
- 计算重要性权重 权 重 = 目 标 分 布 建 议 分 布 权重=\frac{目标分布}{建议分布} 权重=建议分布目标分布
- 用更有可能的样本替换不太可能的样本
重采样
- 给定:加权样本集
- 想要的:随机抽样,其中的 x i x_{i} xi 的概率由 w i w_{i} wi 给出
- 通常进行 n n n 次替换以生成新的样本集
移动机器人定位
- 每个粒子都是机器人的潜在位姿
- 建议分配是机器人的运动模型(预测步骤)
- 观测模型用于计算重要权重(校正步骤)
图搜索路径规划方法:Dijkstra、A*
A*算法
| 开表 | 闭表 | |
|---|---|---|
| 定义 | 记录了当前需要处理的地图上的点 | 记录了当前已经处理的地图上的点 |
| 什么点加入 | 起始点; 起始点的邻接点,且不在闭表里时 |
已经处理的点 |
| 什么点离开 | 开标中的点会按照f(n)升序排序,得到最小值的一个点被最先处理; 当一个点已经处理后,会离开开表,加入闭表 |
不会有点离开闭表 |
- 估值函数:估算了当前处于最优路径上的代价
f ( n ) = g ( n ) + h ( n ) f(n)=g(n)+h(n) f(n)=g(n)+h(n)- g ( n ) g(n) g(n):由起点到当前点的代价;
- h ( n ) h(n) h(n):由当前点到终点的代价。
- 可用简单的几何距离作为估值函数的实现。
总结:
RRT、动态窗口法,Bug Algorithms算法
RRT 基于快速扩展随机树的路径规划算法
- 通过对状态空间中的采样点进行碰撞检测,避免了对空间的建模,能够有效地解决高维空间和复杂约束的路径规划问题。
- 特点:能够快速有效地搜索高维空间,通过状态空间的随机采样点,把搜索导向空白区域,从而寻找到一条从起始点到目标点的规划路径,适合解决多自由度机器人在复杂环境和动态环境中的路径规划。
- 它以一个初始点作为根节点,通过随机采样增加叶子节点的方式,生成一个随机扩展树,当随机树种的叶子节点包含了目标点或进入了目标区域,便可以在随机树中找到一条由从初始点到目标点的路径。
- 该方法是概率完备且不最优的。
- 通常会产生非常次优的解决方案。
- 它是一种纯粹的随机搜索算法,对环境类型不敏感,当空间中包含大量障碍物或狭窄通道约束时,算法的收敛速度慢,效率会大幅下降。
- 难以在有狭窄通道的环境找到路径。因为狭窄通道面积小,被碰到的概率低。
动态窗口法
未写
Bug 算法
- 在Bug算法中,没有假设世界的全局模型,障碍物的位置和形状是未知。只有通过传感获得的信息是已知的。Bug算法假设局部环境知识和全局目标。
- 环境是一个充满未知障碍的二维场景。任何障碍物的周长是有限的,障碍物的数目是有限的,可以是任意形状的。
- 采用了理想定位的机器人模块。该机器人可以随时跟踪机器人的位置。因此,我们总是可以测量源和目标之间的距离。
- 机器人采用触觉或距离传感器。触摸传感器可以检测到与物体的接触。
Bug1
- 绕着障碍物走,避免碰上它
- 首先完全地围绕遇到的障碍物走,然后从距目标最短距离处离开
- 效率很低,但可保证到达任何可达之目标
Bug2
- 总是沿一侧(左侧或右侧)围绕障碍物走
- 走到从起点到目标的连线处就离开障碍物
- 行走总路径短,但有时可构造无效情况
关于考试
- 移动机器人部分只要背诵提纲即可,考概念定义以及默写算法优缺点之类,考查记忆与理解而非应用解题。
- 工业机器人掌握课堂PPT的内容即可,需要会PPT上最最简单的推导,如雅可比矩阵推导,求坐标变换等,复杂的一律不需要看,作业题也没有考到。会考PPT中概念,复习时需要注意细节以及一些条件,比如D-H适用范围等等,对概念要非常清晰。