一、简介
经典椭圆检测方法
椭圆检测算法经过多年的研究发展,已经基本形成一个较完整的体系。它们大致可以分为三类即投票(聚类)、最优化、基于弧段的方法。
投票(聚类)方法
椭圆因为有中心位置坐标、长短轴长度、倾斜角五个参数,标准霍夫变换有较强的鲁棒性,但对内存要求高,运算效率低,不太现实。霍夫变换类算法以霍夫变换为算法基础,经过不同国家研究人员多年的不懈努力研究,如今已衍生出很多改进算法,它们各有优劣。随机霍夫变换算法相对标准霍夫变换计算速度有较大提升,但检测相互遮挡的椭圆时准确度低。
随机hough变换椭圆检测算法
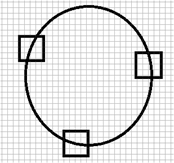
随机椭圆检测结合使用了了最小二乘法和Hough变换算法。第一步预处理,获得较理想的边缘图。第二步随机选取三个点,取这三点为中心相同大小的邻域中所有点,用最小二乘法把它们拟合成一个椭圆。如图2-3所示。第三步从边缘点中再随机选取第四个点,判断此点是否在拟合出的圆上。若是,则认为该椭圆是真实椭圆的可能性较大,接着收集证据,验证该椭圆的真实性。
算法具体过程如下(从第二步开始):
1.把边缘检测得到的点收进集合V中,失败计数器f初始值设为0。设定5个阈值,分别是能容忍的失败次数最大值Tf,检测进行时对V中边缘点数量的要求阈值Tem,随机选取的三点之间两两距离最小值Ta,随机选取的第四点到可能椭圆边界距离的最大值Td,以及椭圆残缺比率阈值Tr。
2.np表示集合V中剩余的点的数量,当np小于Tem时或当失败次数f大于Tf时停止检测,算法终止;否则从V中随机取四点,并从V中删除这四点。
3.若用来求解椭圆参数的三个点两两之间距离都大于Ta,拟合出椭圆,计算第四个点到该椭圆边界的距离,若距离小于Td,执行第4步;若不满足两者之一,将这四个点返回到V中,失败次数加一,回到第2步执行。
4.设E为第3步拟合出来的椭圆,初始化满足阈值Td的点的个数num。遍历V中点,计算并判断它们到椭圆E的边界的距离是否小于Td,若是则num=num+1,并将该点从V中除去,直到遍历完成。
5.若num>=Tr*K,其中K为椭圆E的周长,那么跳转到第6步;否则认为椭圆E不是真实的椭圆,将第4步和第2步中删除的num+4个点返回V中,并跳转到第2步。
6.认为椭圆E是一个真实存在的椭圆,f置0,并跳转到第2步。
随机hough变换的优缺点如下:
第一,由于该算法是基于最小二乘法,所以一方面检测结果往往比真实椭圆小而且对噪声敏感,但是另一方面当预处理效果较好时检测精度很高。
第二,由于该算法基于随机采样,所以一方面可能会有所选点距离较近的情况造成拟合出的椭圆偏差较大,但是另一方面因为随机采样的灵活性检测速度提升了。
第三,一方面当参数选取的较好时检测又快有准确;另一方面,由于该算法严格由参数Ta,Td,Tr控制而且这些参数不易取到合适值,所以会出现不合适的参数不仅增加计算量,而且增加误检机会的情况。
最优化方法
最优化类方法优点在其精度上,缺点是其一次只能处理一个图形,即此前要对图像信息进行分类分离。AndrewFitzgibb等人提出了直接最小二乘法椭圆拟合算法。该方法能保证拟合出来的一定是椭圆。但该方法受到孤立点和噪声点的影响。目前最优化算法多与其他算法一起结合使用。
基于弧段的方法
基于边界聚类的椭圆检测方法结合使用了基于弧段的方法和最小二乘法。从边界图提取圆弧,再经过过滤、聚类,最终用最小二乘法拟合出椭圆。该方法能有效应对多个椭圆、椭圆相互遮挡和椭圆部分缺损等复杂情况,因而引起了广泛的注意。
边界聚类算法流程
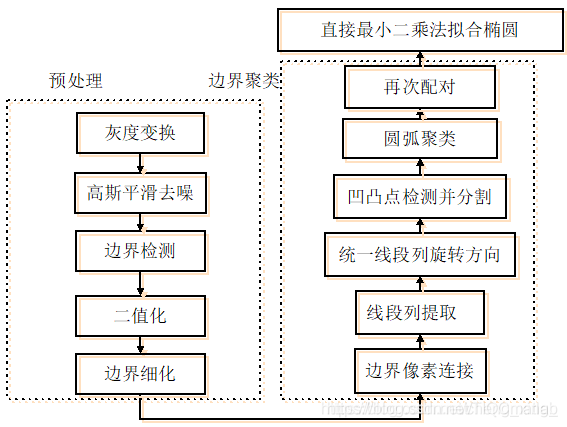
边界聚类算法属于从下往上结构的算法。算法步骤主要分为三步,分别是预处理,边界聚类和直接最小二乘法拟合椭圆三个过程。流程图如下所示:
第四步是二值化。二值化的效果几乎完全取决于分割阈值的选取。所以自动寻找最佳分割阈值的方法就显得十分关键。找到图片二值化的一个合适的分割阈值的一种方法是按图像的灰度特性,将图像分成背景和目标两部分,背景和目标之间的类间方差最大的分割意味着错分概率最小。MATLAB 的Graythresh函数就是使用该方法来获得一个自适应阈值作为二值化的分割依据。
第五步,二值化后,因为椭圆弧附近的非相关像素会严重影响检测结果,因此为了大幅度减少非相关像素,本文用形态学的腐蚀操作来得到细化的边界。
边界像素连接
采用Kovesi的边界连接算法,以8-邻域连通准则从上至下,从左至右扫描二值图像,将边界像素连接为有向边界列。然后采用边界列中像素数阈值条件去除像素数较小的集合。因为若边界列像素数少于阈值数,则很有可能是噪声或背景,应当删除。具体步骤如下:
1.以8-邻域连通准则从上至下,从左至右扫描二值图像,按连通区域对图像中的像素点聚类。
2.寻找每一个连通域中边界像素中所有的结束点和分叉点(分叉点是三条以上曲线的交点)并存储。
3.以这些结束点和分叉点为结束标志,让每一个连通域中的像素点集合分割为遇到结束点和连接点就断开的小集合。
4.删除这些集合中像素数小于某一阈值的部分。
线段列提取
因为图像光栅化难以获得准确的切线,而后续过程需要用到圆弧的切线,所以要进行线段拟合,即用多段折线代替原来的圆弧。具体步骤如下:
1.取边界像素连接成的第i条有向边界列,判断是否超过边界列总数目total,若不是进行步骤2,若是终止算法。
2.判断该边界列是否已经完成处理,若为否则进行第3步;若是则i=i+1,重新进行步骤2.
3.从其中第三个点开始,计算第一个点到这个点(记为点j)的连线方程,并依次判断第一个点和该点之间的所有点到该连线的距离,若所有距离均小于某一阈值,则j=j+1,重新进行步骤3,否则该有向边界列从该处断开,前面部分只保留第一个点和第j个点,前面j个点构成的连线用第一点和第j点之间的直线连线代替;后面部分仍然记为边界列i,
4.判断步骤3中断开的有向边界列后面部分像素数是否小于某阈值,若是则删除掉,否则不处理。最后跳转到步骤1。
完成这一个过程后一个连通域的的像素点构成的曲线就变成了其中部分像素点构成的一条折线。经过这个过程虽然像素信息损失了一部分,但是求取圆弧切线的精度从某种意义上说提高了,因为没有了光栅化效应。而且数据少了处理变得简单。再采用线段数阈值条件去除较短的线段列。若线段数数少于阈值数,则很有可能是噪声或背景或者进行拟合时误差过大,因此须删除。
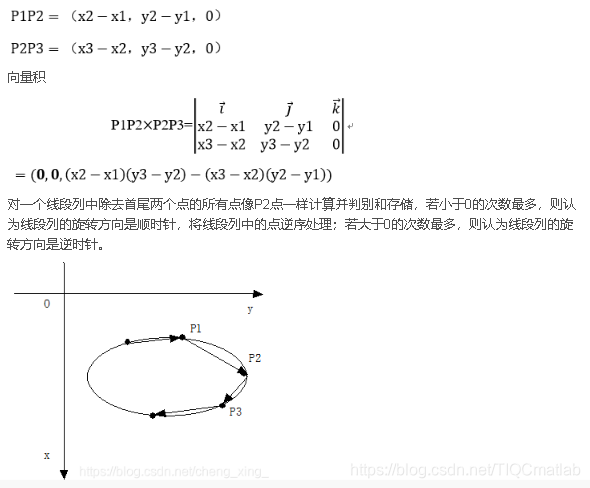
线段列旋转方向统一
本文将所有线段列旋转方向统一为逆时针方向。
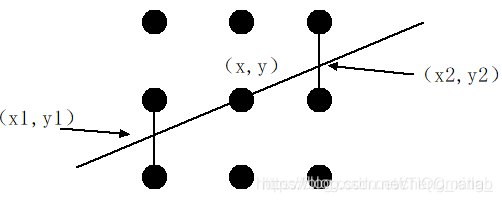
假设图3-4中的黑点为线段列中的点,箭头代表线段列的方向,P1(x1,y1),P2(x2,y2),P3(x3,y3)为线段列中连续的三个像素,像素都引入z坐标,且令其为0,则P1(x1,y1,0),P2(x2,y2,0),P3(x3,y3,0),空间向量
圆弧聚类
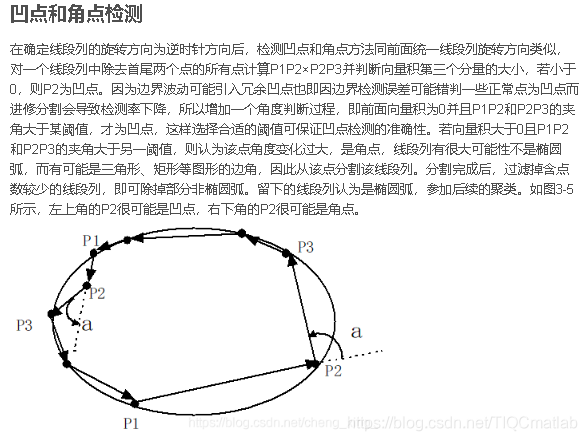
圆弧聚类是将属于同一椭圆但是分开的两条或多条椭圆弧进行聚类。在进行聚类前,首先要判断弧段的完整度。一般用弧段的首尾端点P1,P3与中点P2构成的两向量P2P1,P2P3的夹角的大小来进行判断。夹角越小,一般该椭圆弧越完整,夹角越大,一般认为椭圆弧缺损越严重。设定一个阈值,当夹角小于该阈值时认为该弧段已经足够完整,仅仅靠该弧段上的点就可以较准确地拟合出真实存在的椭圆,因此该弧段不需要参与后面的聚类过程。如果希望该阈值自适应,在划分待聚类椭圆弧和不须聚类的弧(较完整弧)之前,先要确定该阈值。用直接最小二乘法拟合该弧所在的椭圆,若较圆,为了减小的误差,应使阈值夹角稍微大一些,如90度;若该弧所在的椭圆较扁,应使阈值夹角稍微小一些,如60度。接下来才根据该自适应阈值进行对圆弧判断。当大于阈值时认为该弧段上的点过少,不足以拟合出准确的椭圆,需要找到和该弧段属于同一椭圆的弧段然后用它们所有的点一起拟合出一个椭圆。经过此判断过程,椭圆弧就被分成两组。把需要参加聚类的椭圆弧按照含点数的数目由多到少进行排列,下面的过程都按照数目多的弧段优先的顺序进行。
对于待聚类的椭圆弧,先要定义其搜索区域,由于椭圆是封闭图形,所以整个椭圆可以确定是在其任何一部分弧和弧两端点的切线所在的射线包围起来的区域里面,属于该椭圆的其他弧以确定是在该弧对应的弦和弧两端点的切线所在的射线包围起来的区域里面。这就是我们搜索的区域。在图中a1的搜索区域也就是射线l1,l2,弦l3和图像边缘范围内的区域,在这个区域里面找弧,可以缩小搜寻的范围,提高效率。判断一条弧是否在待聚类椭圆弧的搜索区域里面我们只需取这条弧的首末端点j3,j4是否在搜索区域。方法是分别求过这两点同时平行于待聚类椭圆弧对应弦l3的直线和切线的交点,若交点分别有两个,交点都在射线上且这两个端点在对应两个交点之间则该弧段在搜索区域内。图中明显a2,a3,a4在a1的搜索区域内而a5不在。

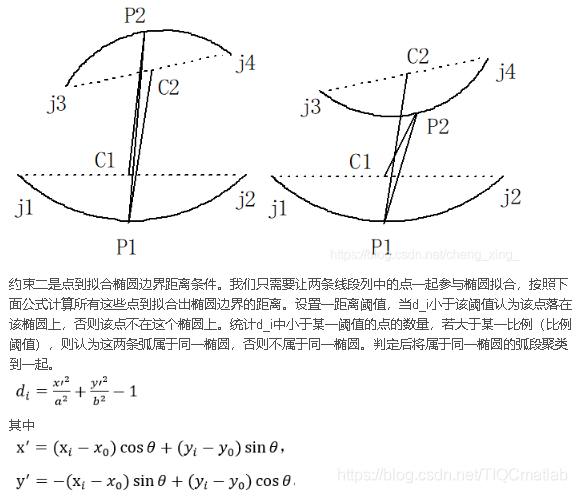

如上图(a)中的参与拟合的点较多都落在拟合的椭圆上,所以有较大可能满足约束二条件;(b)中大多数拟合点点离拟合出的椭圆边界有一定距离,有较大可能不满足约束条件二。
如果希望这两个阈值改为自适应的,方法是先拟合出椭圆,判断椭圆大小。若椭圆较小,应适当降低限制,即增大距离阈值,减小比例阈值;若椭圆较大,应适当提高限制,即减小距离阈值,增大比例阈值。本算法中选取的是,若椭圆的短轴小于50则距离阈值为0.05,比例阈值设为0.7;否则前者取0.03,后者取0.8。
再配对
聚类后的弧和较完整弧或者两个较完整弧可能属于同一椭圆但是在前面的步骤它们只是被分开了并没有配对,所以有必要增加再匹配过程,增加检测准确度。匹配方法还是约束条件二的方法。因为该方法和原算法的去伪过程相似,所以经过该方法后无需再去伪。
直接最小二乘法椭圆拟合
前面的很多步骤都删除了像素点较少的集合,或者用少数点代替了边界列中的很多点,或者是分割后再删除点数较少的集合的,这些操作到椭圆拟合这一步实际上基本上去除了所有的背景和噪声,甚至包括一部分有用信息。所以即使对噪声和孤立点敏感的直接最小二乘法也可以用来拟合椭圆,而且因为该方法对椭圆缺损不敏感,所以非常适合。
二、源代码
clc;
clear all;
im=imread('1.jpg');
im0=rgb2gray(im);%变彩色为黑白
im1=medfilt2(im0,[3 3]);%中值滤波函数
BW = edge(im1,'sobel'); %边缘检测,边缘为1,其余为0
[imx,imy]=size(BW);%获取矩阵行数和列数
L = bwlabel(BW,8);% Calculating connected components
mx=max(max(L))
% There will be mx connected components.Here U can give a value between 1 and mx for L or in a loop you can extract all connected components
% If you are using the attached car image, by giving 1,2,3 to L you can extract the number plate completely.
[r,c] = find(L==3);
rc = [r c];
[sx sy]=size(rc);
n1=ones(imx,imy);%zeros
for i=1:sx
x1=rc(i,1);
y1=rc(i,2);
n1(x1,y1)=0;
end % Storing the extracted image in an array
figure,imshow(n1);
title('边缘提取');
[S]=ellipsefit(c,r)
a=S.Phi;
jdg(S.Xc,S.Yc,S.A,S.B,a,n1)%plot ellipse
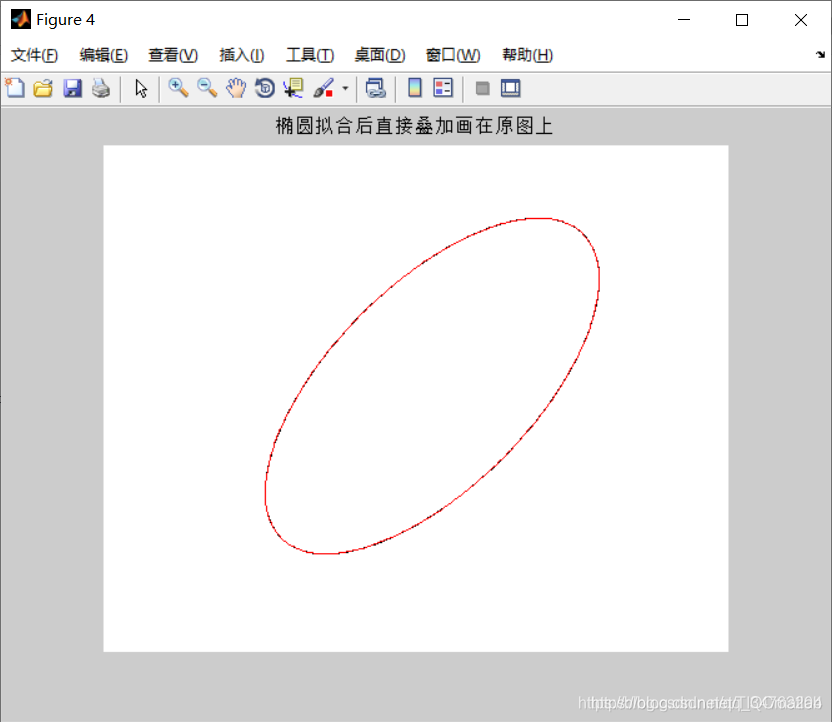
三、运行结果
四、备注
完整代码或者代写添加QQ2449341593
往期回顾>>>>>>
【图像识别】基于matlab路面裂缝识别含GUI【含Matlab源码 009期】
【图像识别】基于matlab身份证号码识别【含Matlab源码 014期】
【图像压缩】基于matlab图像处理教程系列之图像压缩【含Matlab源码 024期】
【图像分割】基于matlab图像处理教程系列之图像分割(一)【含Matlab源码 025期】
【图像分割】基于matlab图像处理教程系列之图像分割(二)【含Matlab源码 026期】
【模式识别】基于matlab指纹识别【含Matlab源码 029期】
【模式识别】基于matlab银行卡号识别【含Matlab源码 030期】
【图像聚类】基于matlab FCM和改进的FCM脑部CT图像聚类【含Matlab源码 074期】
【图像评价】基于matlab CCF算法的图像质量评价【含Matlab源码 075期】
【图像增强】基于matlab局部对比度增强的CLAHE算法之直方图增强【含Matlab源码 076期】
【图像融合】基于matlab Frequency Partition之图像融合【含Matlab源码 077期】
【图像评价】基于matlab SVM之图像无参考质量评价【含Matlab源码 078期】
【图像处理】基于matlab DWT+DCT+PBFO改进图像水印隐藏提取含GUI【含Matlab源码 081期】
【图像变换】基于matalb DIBR-3D图像变换【含Matalb源码 082期】
【图像融合】基于matlab CBF算法的图像融合【含Matlab源码 083期】
【图像分割】基于matlab模糊聚类算法FCM的图像分割【含Matlab源码 084期】
【图像分割】基于形态学重建和过滤改进FCM算法(FRFCM)的的图像分割【Matlab 085期】
【图像去噪】基于matlab自适应形态学的图像去噪【含Matlab源码 086期】
【图像增强】基于matlab DEHAZENET和HWD的水下去散射图像增强【含Matlab 087期】
【图像增强】基于matlab PSO寻优ACE的图像增强【含Matlab源码 088期】
【图像增强】基于matlab区域相似变换函数和蜻蜓算法之灰度图像增强【含Matlab源码 089期】
【图像重建】基于matlab图像重建之ASTRA算法【含Matlab源码 090期】
【图像分割】基于matlab四叉树图像分割【含Matlab源码 091期】
【图像分割】基于matlab心脏中心线提取【含Matlab源码 092期】
【图像识别】基于matlab svm植物叶子疾病检测和分类【含Matlab源码 093期】
【图像识别】基于matlab模板匹配之手写数字识别系统GUI界面【含Matlab源码 094期】
【图像识别】基于matlab不变矩的数字验证码识别含GUI界面【含Matlab源码 095期】
【图像识别】基于matlab条形码识别系统【含Matlab源码 096期】
【图像识别】基于matlab RGB和BP神经网络的人民币识别系统含GUI界面【含Matlab源码 097期】
【图像识别】基于matlab cnn卷积神经网络之验证码识别【含Matlab源码 098期】
【图像直线拟合】基于matlab最小二乘法的图像直线拟合【含Matlab源码 100期】
【图像去雾】基于matlab暗通道之图像去雾【含Matlab源码 101期】
【图像分割】基于matlab直觉模糊C均值聚类的图像分割IFCM【含Matlab源码 120期】
【图像分割】基于matlab最大类间方差法(otsu)图像分割【含Matlab源码 121期】
【模式识别】基于matlab银行监控系统人脸识别【含Matlab源码 125期】
【模式识别】基于matlab GUI界面的疲劳检测系统【含Matlab源码 126期】
【图像识别】基于matlab国外车牌识别【含Matlab源码 128期】
【图像分割】基于matlab蚁群优化模糊聚类的图像分割【含Matlab源码 130期】