制作ubuntu16.04安装U盘的方法和步骤可以参照我之前的博客:
https://blog.csdn.net/neptune4751/article/details/79146885
系统安装可以参照:
https://www.cnblogs.com/masbay/p/10745170.html
补充一下其中博主没有提到的分区类型以及大小:
1./boot:主分区 大小200M 格式:ext4
2./: 主分区 大小 80G 格式:ext4
3.swap 交换空间 逻辑分区 大小内存大小的2倍,我设置的是16G
4./home 逻辑分区 剩余的大小都分给了它 格式为ext4 总共大小为 120G
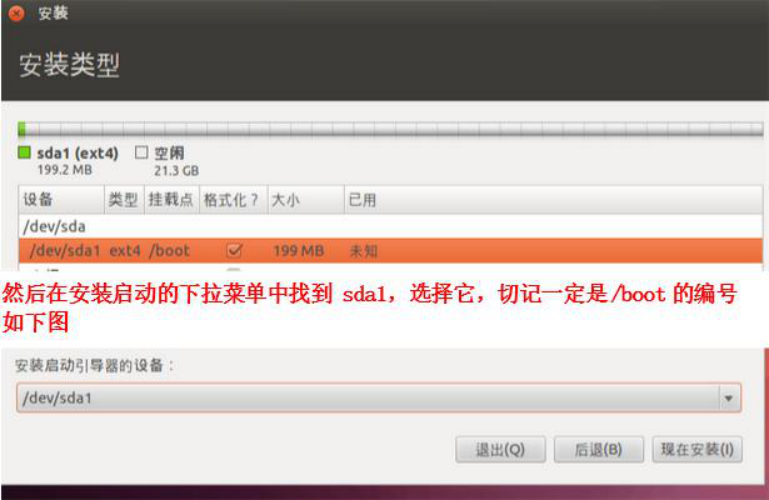
另外博主用的是Thinkstation,第一次安装总是自动进入win10,无法进入ubuntu,需要使用F12进入bios界面。安装成功之后可以在主界面选择进入win10还是ubuntu。成功的那一次,安装的启动引导器设备没有按照下图那样选在/boot的编号,按照默认的选项安装。
接下来安装视觉SLAM运行需要的各个库,包括ROS 、Eigen、Sophus、OpenCV3+contrib、PCL点云库、Pangolin、Octomap
1.ROS安装可以参照我之前的博客:
https://blog.csdn.net/neptune4751/article/details/103150788
其中值得注意的是:在执行“sudo rosdep init”语句时候报错:“cannot download default sources list from:”
感觉最近github有些限速,下载资源很慢。解决办法可以参照:https://blog.csdn.net/nanianwochengshui/article/details/105702188
2.Eigen的安装:
博主安装版本是Eigen3.3.7,有一点需要提醒的是:后续需要安装ceres,由于编译ceres的时候会把Eigen的版本编译进去,所以安装顺序需要先安装Eigen3.3.7,再安装ceres1.14.0。
如果使用“sudo apt-get install libeigen3-dev:安装的是3.2版本的eigen,无法与后序要安装的sophus和Ceres版本相匹配
正确方法:
(1)在官网(http://eigen.tuxfamily.org/index.php?title=Main_Page)下载安装包:eigen-3.3.7.tar.bz2 ,然后提取到此处
(2)进入文件夹eigen-3.3.7,右键在终端打开。
(3)进行安装
1.mkdir build
2.cd build
3.cmake ..
4.sodu make install因为我再后续运行VINS-MONO的时候出现错误:

最后调整一下安装顺序:先安装Eigen3.3.7,再安装ceres,问题解决。
具体Eigen安装步骤参照:
https://blog.csdn.net/Night___Raid/article/details/105113617#3.%20OpenCV3%C2%A0k
3.ceres安装,可以参照:
http://ceres-solver.org/installation.html
https://blog.csdn.net/Night___Raid/article/details/105113617#3.%20OpenCV3%C2%A0k
4.OpenCV3+contrib安装
编译的时候会出现错误:opencv_contrib缺少boostdesc_bgm.i等文件
错误提示:~/opencv_contrib/modules/xfeatures2d/src/boostdesc.cpp:673:20: fatal error: boostdesc_bgm.i: No suchfileor directory
这时如果查看build文件夹下的CMakeDownloadLog.txt,会发现其中指出boostdesc_bgm.i缺失,到其指定地址下载。
boostdesc_bgm.i
boostdesc_bgm_bi.i
boostdesc_bgm_hd.i
boostdesc_lbgm.i
boostdesc_binboost_064.i
boostdesc_binboost_128.i
boostdesc_binboost_256.i
vgg_generated_120.i
vgg_generated_64.i
vgg_generated_80.i
vgg_generated_48.i
百度云链接:https://pan.baidu.com/s/1BeYF8kqEZLAJYQj-MvxpmA
提取码:e1wc
放在 opencv_contrib-3.3.1/modules/xfeatures2d/src/ 路径下,重新编译即可;
5.PCL点云库、Pangolin、Octomap的安装,均可参照下面链接进行:
https://blog.csdn.net/Night___Raid/article/details/105113617#3.%20OpenCV3%C2%A0k