import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
# MNIST 数据集相关的常数
# 输入层的节点数,对于MNIST数据集,这个就等于图片的像素
INPUT_NODE = 784
# 输出层的节点数,这个等于类别的数目,因为在MNIST数据集中需要区分的
# 是0-9这个10个数字,所以这里输出层的节点数为10
OUTPUT_NODE = 10
# 配置神经网络的参数
# 隐藏层节点数,这里使用只有一个隐藏层的网络结构作为样例
# 这个隐藏层有500个节点
LAYER1_NODE = 500
# 一个训练batch中的训练数据个数,数字越小时,训练过程越接近随机梯度下降
# 数字越大时,训练越接近梯度下降
BATCH_SIZE = 100
# 基础的学习率
LEARNING_RATE_BASE = 0.8
# 学习率的衰减率
LEARNING_RATE_DECAT = 0.99
# 描述模型复杂度的正则化项在损失函数中的系数
REGULARIZATION_RATE = 0.0001
# 训练轮数
TRAINING_STEPS = 30000
# 滑动平均衰减率
MOVING_AVERAGE_DECAY = 0.99
# 一个辅助函数,给定神经网络的输入和所有参数,计算神经网络的前向传播结果
# 在这里定义了一个使用ReLU激活函数的三层全连接神经网络
# 通过加入隐藏层实现了多层网络结构,通过ReLU激活函数实现了去线性化
# 在这个函数中也支持传入用于计算参数平均值的类,这样方便在测试时使用滑动平均模型
def inference(input_tensor, avg_class, weights1, biases1, weights2, biases2):
# 当没有提供滑动平均类时,直接使用参数当前的取值
if avg_class == None:
# 计算隐藏层的前向传播结果,这里使用了ReLU激活函数
layer1 = tf.nn.relu(tf.matmul(input_tensor, weights1) + biases1)
# 计算输出层的前向传播结果,因为在计算损失函数时会一并计算softmax函数
# 所以这里不需要加入激活函数,而且不加入softmax不会影响预测结果
# 因为预测时使用的是不同类型对应节点输出值的相对大小,
# 有没有softmax层对最后分类的结果没有影响
# 于是在计算整个神经网络的前向传播时可以不加入最后的softmax层
return tf.matmul(layer1, weights2) + biases2
else:
# 首先使用avg_class.average 函数来计算得出变量的滑动平均值
# 然后再计算相应的神经网络前向传播结果
layer1 = tf.nn.relu(
tf.matmul(input_tensor, avg_class.average(weights1)) +
avg_class.average(biases1)
)
return tf.matmul(layer1, avg_class.average(weights2)) + avg_class.average(biases2)
# 训练模型的过程
def train(mnist):
x = tf.placeholder(tf.float32, [None, INPUT_NODE], name='x-input')
y_ = tf.placeholder(tf.float32, [None, OUTPUT_NODE], name='y-input')
# 生成隐藏层的参数
weights1 = tf.Variable(
tf.truncated_normal([INPUT_NODE, LAYER1_NODE], stddev=0.1))
biases1 = tf.Variable(tf.constant(0.1, shape=[LAYER1_NODE]))
# 生成输出层的参数
weights2 = tf.Variable(
tf.truncated_normal([LAYER1_NODE, OUTPUT_NODE], stddev=0.1))
biases2 = tf.Variable(tf.constant(0.1, shape=[OUTPUT_NODE]))
# 计算在当前参数下神经网络前向传播的结果。这里给出的用于计算滑动平均的类为None
# 所以函数不会使用参数的滑动平均值
y = inference(x, None, weights1, biases1, weights2, biases2)
# 定义存储训练轮数的变量,这个变量不需要计算滑动平均值
# 这里指定这个变量为不可训练的变量(trainable=False)
# 在使用TensorFlow训练神经网络时,一般会将代表训练轮数的变量指定为不可训练的参数
global_step = tf.Variable(0, trainable=False)
# 给定滑动平均衰减率和训练轮数的变量,初始化滑动平均类。
# 当给定训练轮数的变量可以加快训练早期变量的更新速度
varibale_averages = tf.train.ExponentialMovingAverage(
MOVING_AVERAGE_DECAY, global_step
)
# 在所有代表神经网络参数的变量上使用滑动平均。
# 其他辅助变量(比如global_step)就不需要了
# tf.trainable_variables 返回的就是图上集合GraphKeys.TRAINABLE_VARIABLES中的元素
# 这个集合的元素就是所有没有指定trainable=False 的参数
varibale_averages_op = varibale_averages.apply(tf.trainable_variables())
# 计算使用了滑动平均之后的前向传播结果。因为滑动平均不会改变变量本身的额取值
# 而是会委会一个影子变量来记录其滑动平均值,所以当需要使用这个滑动平均值时,需要明确调用average函数
average_y = inference(x, varibale_averages, weights1, biases1, weights2, biases2)
# 计算交叉熵作为刻画预测值和真实值之间差距的损失函数,这里使用了TensorFlow中提供的
# sparse_softmax_cross_entropy_with_logits函数来计算交叉熵
# 当分类问题中只有一个正确答案时,可以使用这个函数来加速交叉熵的计算
# MNIST问题的图片中只包含了一个0-9中的一个数字,所以可以使用这个函数来计算交叉熵损失
# 这个函数的第一个参数是神经网络不包含softmax层的前向传播结果,第二个是训练数据的正确答案
#因为标准答案是一个长度为10的一位数组,而该函数需要提供了一个正确的答案数字
#所以需要使用 tf.argmax函数来得到正确答案对应的类别编号
cross_entropy = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=y, labels=tf.argmax(y_, 1))
# 计算在当前batch中所有样例的交叉熵平均值
cross_entropy_mean = tf.reduce_mean(cross_entropy)
# 计算L2正则化损失函数
regularizer = tf.contrib.layers.l2_regularizer(REGULARIZATION_RATE)
# 计算模型的正则化损失,一般只计算神经网络边上权重的正则化损失,而不使用偏置项
regularization = regularizer(weights1) + regularizer(weights2)
# 总损失等于交叉熵损失和正则化损失的和
loss = cross_entropy_mean + regularization
# 设置指数衰减的学习率
learning_rate = tf.train.exponential_decay(
LEARNING_RATE_BASE, #基础的学习率,随着迭代的进行,更新变量时使用的
# 学习率在这个基础上递减
global_step, # 学习率在这个基础上递减
mnist.train.num_examples / BATCH_SIZE, # 过完所有的训练数据需要的迭代次数
LEARNING_RATE_DECAT, # 学习率衰减速度
staircase=True
)
# 使用tf.train.GradientDescentOptimizer优化算法来优化损失函数
# 注意这里损失函数包含了交叉熵损失和L2正则化损失
train_step = tf.train.GradientDescentOptimizer(learning_rate).minimize(loss, global_step=global_step)
# 在训练神经网络模型时,没过一遍数据即需要通过反向传播来更新神经网络中的参数
# 又要更新每一个参数的滑动平均值,为了一次完成多个操作,西面两行程序和下面代码是等价的
# train_op = tf.group(train_step, varibale_averages_op)
with tf.control_dependencies([train_step, varibale_averages_op]):
train_op = tf.no_op(name='train')
# 检验使用了滑动平均模型的神经网络前向传播结果是否正确。tf.argmax(average_y, 1)
# 计算每一个样例的预测答案,其中average_y 是一个 batch_size*10的二维数组,
# 每一行表示一个样例的前向传播结果。tf.argmax的第二个参数“1”表示选取最大值的的操作
# 仅在第一个维度中进行,也即是说,只有每一行选取最大值对应的下标
# 于是得到的结果是一个长度为batch的一维数组,这个一维数组中的值就表示了
# 每一个样例对应的数字识别结果
# tf.rqual 判断两个张量的每一维是否相等,如果相等返回True,否则返回False。
correct_prediction = tf.equal(tf.argmax(average_y, 1), tf.argmax(y_, 1))
# 这个运算首选将一个布尔型的数值转换为实数型,然后计算平均值,这个平均值
# 就是模型在这一组数据上的正确率
accuracy = tf.reduce_mean(tf.cast(correct_prediction, tf.float32))
# 初始化会话并开始训练过程
with tf.Session() as sess:
tf.global_variables_initializer().run()
# 准备验证数据,一般在神经网络的训练过程中会通过验证数据来判断
# 大致判断停止的条件和评判训练的效果
validate_feed = {
x: mnist.validation.images,
y_: mnist.validation.labels}
#准备测试数据,在真实的应用中,这部分数据在训练时是不可见的
# 下面数据只是作为模型优劣的最后评价标准
test_feed = {
x: mnist.test.images, y_: mnist.test.labels}
# 迭代地训练神经网络
for i in range(TRAINING_STEPS):
# 每1000轮输出一次在验证数据集上的测试结果
if i % 1000 == 0:
# 计算滑动平均模型在验证数据上的结果,因为MNIST数据集比较小,
# 所以一次可以处理所有的验证数据
# 当神经网络模型比较复杂或者验证数据比较大,太大的batch会导致计算时间过长
# 甚至发生内存溢出的错误
validate_acc = sess.run(accuracy, feed_dict=validate_feed)
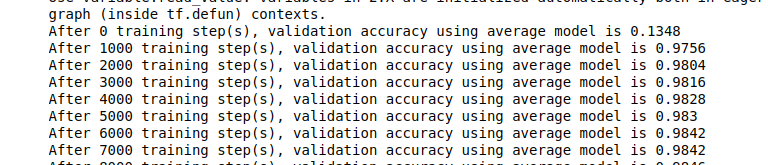
print('After %d training step(s), validation accuracy using average model is %g'%(i, validate_acc))
# 产生这一轮使用的一个batch的训练数据,并运行训练过程
xs, ys = mnist.train.next_batch(BATCH_SIZE)
sess.run(train_op, feed_dict={
x:xs, y_:ys})
# 在训练结束后,在测试数据集上检测神经网络模型的最终正确率
test_acc = sess.run(accuracy, feed_dict=test_feed)
print('After %d training step(s), test accuracy using average model is %g'%(TRAINING_STEPS, test_acc))
# 主程序入口
def main(argv=None):
# 声明处理MNIST数据集的类,这个类在初始化的时候会自动下载数据
mnist = input_data.read_data_sets('data', one_hot=True)
train(mnist)
# Tensorflow 提供的一个主程序入口,tf.app.run会调用上面定义的main函数
if __name__ == '__main__':
# tf.app.run(main=None)
main()
下面是输出,经过3w轮的训练,正确率达到了98.5
 这些代码均来自与《TensorFlow实战:Google深度学习框架》这本书;
这些代码均来自与《TensorFlow实战:Google深度学习框架》这本书;
但书中的代码有错误,都已改正。