1.算法原理简述
对于图像I(x,y),前景(即目标)和背景的分割阈值记作T,属于前景的像素点数占整幅图像的比例记为ω0,其平均灰度μ0;背景像素点数占整幅图像的比例为ω1,其平均灰度为μ1。图像的总平均灰度记为μ,类间方差记为g。
假设图像的背景较暗,并且图像的大小为M×N,图像中像素的灰度值小于阈值T的像素个数记作N0,像素灰度大于阈值T的像素个数记作N1,则有:
ω0=N0/ M×N (1)
ω1=N1/ M×N (2)
N0+N1=M×N (3)
ω0+ω1=1 (4)
μ=ω0*μ0+ω1*μ1 (5)
g=ω0(μ0-μ)^2+ω1(μ1-μ)^2 (6)
将式(5)代入式(6),
得到等价公式:
g=ω0ω1(μ0-μ1)^2 (7)
这就是类间方差采用遍历的方法得到使类间方差g最大的阈值T,即为所求。
2.算法设计流程图(或难点分析)

3.算法设计代码与注释(大津阈值)
(简单处理)
I=im2double(imread('cell.jpg'));
k=graythresh(I); %得到最优阈值
J=im2bw(I,k); %转换成二值图,k为分割阈值
subplot(121);imshow(I);title('Original');%显示原图
subplot(122);imshow(J); title('Processed') ;%显示处理后的图像(复杂处理)
I=rgb2gray(imread('cell.jpg')); %读图并转化为灰度图
subplot(121);imshow(I);title('Original'); %显示原图灰度图
Ni=imhist(I); %计算直方图数组
N=sum(Ni); %总像素点个数
delamax=0; %类间方差最大值初始化
threshold=0; %阈值初始化
for k=2:255
u=dot([0:255],Ni/N); %图像的总平均灰度级
w0=sum(Ni(1:k)/N); %前景类像素所占面积的比例
w1=1-w0; %背景类像素所占面积的比例
if w0==0|w0==1 %当w0为1或0时提前结束本次循环
continue
end
u0=dot([0:k-1],Ni(1:k)/N)/w0; %前景类像素的平均灰度
u1=dot([k:255],Ni(k+1:256)/N)/w1; %背景类像素的平均灰度
dela(k)=w0*(u-u0)^2+w1*(u-u1)^2; %类间方差
%求出类间方差的最大值,最大时的那个值对应的k值存入delamax
if dela(k)>delamax
delamax=dela(k);
threshold=k-1;
end
end
%以下为阈值分割程序
[width,height]=size(I); %获取图片宽高
for i=1:width
for j=1:height
if(I(i,j)<threshold) %灰度小于阈值时则为黑色
BW1(i,j)=0;
else
BW1(i,j)=1; %灰度大于阈值时则为白色
end
end
end
subplot(122);imshow(BW1);title('Processed')%显示处理之后的图像
figure;histogram(I);xlim([0 255]); %显示原图灰度图的直方图4.实验结果与分析
图1 细胞图像处理图

图2 细胞原图直方图
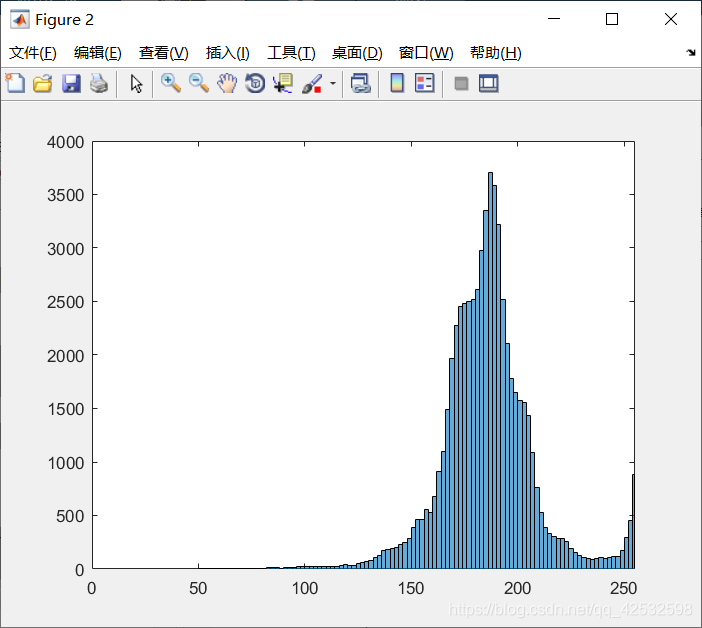
图1为使用细胞图像进行处理之后的图像,其中Original标题的为细胞图像原图,Processed标题的图像为进行OTSU算法处理之后的图像。从图1的对比当中,可以看到使用OTSU之后图像被处理的结果。它相对于迭代阈值分割算法来说得出的结果更好,可以很明显的分割出光学显微镜下的细胞。图2为细胞原图灰度化之后的直方图。
5.结论与展望
大津法的优点在于可以快速有效的找到类间分割阈值,但其缺点也很明显,就是只能针对单一目标分割,或者感兴趣的目标都属于同一灰度范围,若需探测目标灰度范围分布较大,则必将有一部分目标探测丢失。