文章目录
声明
本文整合了网上内容,引用出处见文末参考链接,如有侵权请联系我删除。
双线性插值(Bilinear Interpolation)性质
- 当对相邻四个像素点采用双线性插值时,所得表面在邻域处是吻合的,但斜率不吻合。并且双线性灰度插值的平滑作用可能使得图像的细节产生退化,这种现象在进行图像放大时尤其明显。
单线性插值原理
注:单线性插值是我自己取的名字,为了便于说明
为了方便说明,先以一条直线的插值为例,说明直线一维的线性插值,再说明二维的。
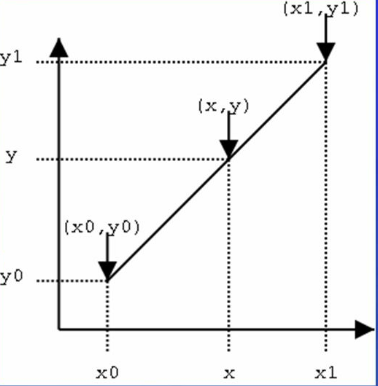
如图,我们已经知道在x=x0处和x=x1处的y值分别为y0和y1,现在要插值得到x=x处的y值是多少。线性插值的原理就是在已知的两点之间作一条线段,用来估计两点之间的任一未知点的y值。
根据线段(x0,y0)->(x,y)的斜率与线段(x0,y0)->(x1,y1)相等,有
y − y 0 x − x 0 = y 1 − y 0 x 1 − x 0 \frac{y-y_0}{x-x_0} = \frac{y_1-y_0}{x_1-x_0} x−x0y−y0=x1−x0y1−y0
所以
y = y 1 − y 0 x 1 − x 0 × ( x − x 0 ) + y 0 y = \frac{y_1-y_0}{x_1-x_0} \times (x-x_0) + y_0 y=x1−x0y1−y0×(x−x0)+y0
双线性插值原理
基本原理
有了上面单线性插值的介绍,现在来说明双线性插值原理。如下图所示,我们已知4个点(u’, v’)、(u’+1, v’)、(u’+1, v’+1)、(u’, v’+1)的灰度值分别为g(u’, v’)、g(u’+1, v’)、g(u’+1, v’+1)、g(u’, v’+1)。现在要通过这4个点插值得到点(u0, v0)的灰度值g(u0, v0)。
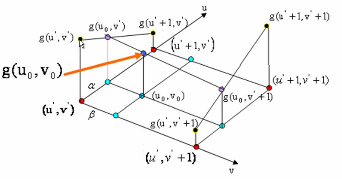
我们可以将插值分解为多个单线性插值来处理:
-
在v=v’这条直线的u方向上,通过单线性插值得到点(u0, v’)的灰度值 :
g ( u 0 , v ′ ) = g ( u ′ + 1 , v ′ ) − g ( u ′ , v ′ ) u ′ + 1 − u ′ × ( u 0 − u ′ ) + g ( u ′ , v ′ ) g(u_0, v') = \frac{g(u'+1, v') - g(u', v')}{u'+1 - u'} \times (u_0 - u') + g(u', v') g(u0,v′)=u′+1−u′g(u′+1,v′)−g(u′,v′)×(u0−u′)+g(u′,v′) -
在v=v’+1这条直线的u方向上,通过单线性插值得到点(u0, v’+1)的灰度值:
g ( u 0 , v ′ + 1 ) = g ( u ′ + 1 , v ′ + 1 ) − g ( u ′ , v ′ + 1 ) u ′ + 1 − u ′ × ( u 0 − u ′ ) + g ( u ′ , v ′ + 1 ) g(u_0, v'+1) = \frac{g(u'+1, v'+1) - g(u', v'+1)}{u'+1 - u'} \times (u_0 - u') + g(u', v'+1) g(u0,v′+1)=u′+1−u′g(u′+1,v′+1)−g(u′,v′+1)×(u0−u′)+g(u′,v′+1) -
在u=u0这条直线的v方向上,通过单线性插值得到点(u0, v0)的灰度值:
g ( u 0 , v 0 ) = g ( u 0 , v ′ + 1 ) − g ( u 0 , v ′ ) v ′ + 1 − v ′ × ( v 0 − v ′ ) + g ( u 0 , v ′ ) g(u_0, v_0) = \frac{g(u_0, v'+1) - g(u_0, v')}{v'+1 - v'} \times (v_0 - v') + g(u_0, v') g(u0,v0)=v′+1−v′g(u0,v′+1)−g(u0,v′)×(v0−v′)+g(u0,v′)
简化公式
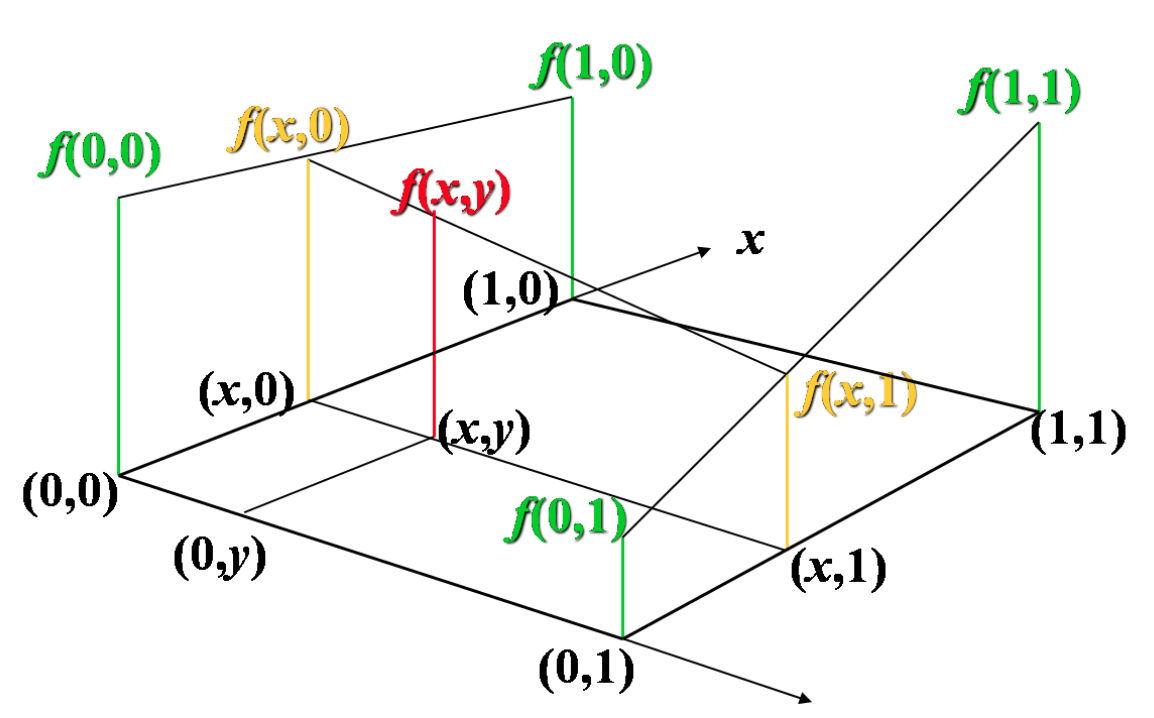
上面的公式比较复杂,如果选择一个坐标系统,如下图,使得的四个已知点坐标分别为 (0, 0)、(0, 1)、(1, 0) 和 (1, 1),那么插值公式就可以简化为:
g ( u 0 , v 0 ) = g ( 0 , 0 ) ( 1 − u 0 ) ( 1 − v 0 ) + g ( 1 , 0 ) u 0 ( 1 − v 0 ) + g ( 0 , 1 ) ( 1 − u 0 ) v 0 + g ( 1 , 1 ) u 0 v 0 g(u_0,v_0)=g(0,0)(1-u_0)(1-v_0)+g(1,0)u_0(1-v_0)+g(0,1)(1-u_0)v_0+g(1,1)u_0v_0 g(u0,v0)=g(0,0)(1−u0)(1−v0)+g(1,0)u0(1−v0)+g(0,1)(1−u0)v0+g(1,1)u0v0
或者用矩阵运算表示为:
g ( u 0 , v 0 ) = [ 1 − u 0 u 0 ] [ g ( 0 , 0 ) g ( 0 , 1 ) g ( 1 , 0 ) g ( 1 , 1 ) ] [ 1 − v 0 v 0 ] g(u_0, v_0) = \begin{bmatrix} 1-u_0 & u_0 \end{bmatrix} \begin{bmatrix} g(0,0) & g(0,1) \\ g(1,0) & g(1,1) \end{bmatrix}\begin{bmatrix} 1-v_0 \\ v_0 \end{bmatrix} g(u0,v0)=[1−u0u0][g(0,0)g(1,0)g(0,1)g(1,1)][1−v0v0]
图像坐标的前向映射和反向映射
前向映射
- 计算量大。计算量与原图大小有关,随着原图大小增大而增大。
- 不方便并行。输出图像某一点的像素值不能直接得到,需要遍历输入图像的所有像素值,对其进行坐标变换,分配像素值到整数位置,才能得到输出图像各像素点的像素值。
- 必须归一化,虽然分配系数之和 ( 1 − u 0 ) ( 1 − v 0 ) + u 0 ( 1 − v 0 ) + ( 1 − u 0 ) v 0 + u 0 v 0 (1-u_0)(1-v_0)+u_0(1-v_0)+(1-u_0)v_0+u_0v_0 (1−u0)(1−v0)+u0(1−v0)+(1−u0)v0+u0v0 为1。但输出图像上每个点的像素值是多个分配值叠加而成的,不能保证所有分配到其上的权重之和为1。因此必须记录下所有分配到其上的权重并累加起来,最后利用累加权重进行归一化,才能得到正确的插值结果。
- 可能出现空洞?如果输出图像比原图像大很多的话,可能会有空洞?例如原图两个相邻像素映射到输出图像中相距几十个像素距离,那他们中间的像素值时不是不好插值了?
下图为向前映射的示意图。输入图像上整数点坐标映射到输出图像之后,变成了非整数点坐标。因此,需要将其像素值按一定权重分配到其周围四个像素点上。对于输出图像而言,其整数点像素值周围会有很多输入图像像素映射过来,每个到其周围的非整数点像素值都会分配一定的灰度值到它上面,将这些分配而来的像素值叠加,就是输出图像整数点位置的像素值。由于这个分配、叠加的特性,向前映射法有时也叫像素移交映射。
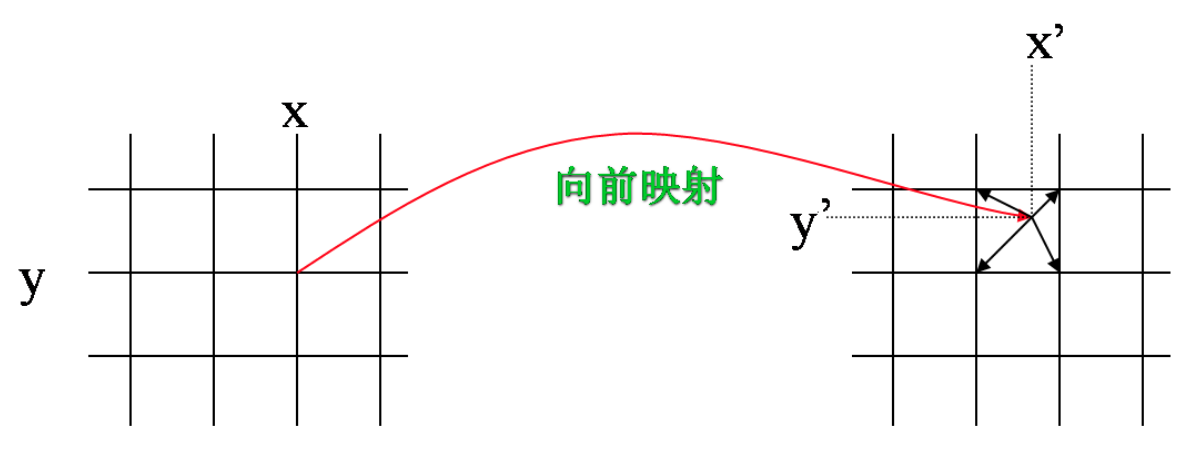
因此,对于向前映射而言,输出图像某一点的像素值不能直接得到,需要遍历输入图像的所有像素值,对其进行坐标变换,分配像素值到整数位置,才能得到输出图像各像素点的像素值。这是向前映射法的缺点。
对向前映射而言,虽然分配系数之和 ( 1 − u 0 ) ( 1 − v 0 ) + u 0 ( 1 − v 0 ) + ( 1 − u 0 ) v 0 + u 0 v 0 (1-u_0)(1-v_0)+u_0(1-v_0)+(1-u_0)v_0+u_0v_0 (1−u0)(1−v0)+u0(1−v0)+(1−u0)v0+u0v0 为1。但输出图像上每个点的像素值是多个分配值叠加而成的,不能保证所有分配到其上的权重之和为1。因此必须记录下所有分配到其上的权重并累加起来,最后利用累加权重进行归一化,才能得到正确的插值结果。
反向映射
- 计算量小。计算量与输出图像大小有关,随着输出图像大小增大而增大。
- 方便并行。将输出图像某个像素点映射回原图,取原图相邻四个点插值可直接得到,不用遍历完整个原图。
- 不需要归一化。以双线性插值为例,对反向映射而言,系数之和 ( 1 − u 0 ) ( 1 − v 0 ) + u 0 ( 1 − v 0 ) + ( 1 − u 0 ) v 0 + u 0 v 0 (1-u_0)(1-v_0)+u_0(1-v_0)+(1-u_0)v_0+u_0v_0 (1−u0)(1−v0)+u0(1−v0)+(1−u0)v0+u0v0 为1。
- 不会出现空洞。
通常我们都使用反向映射。
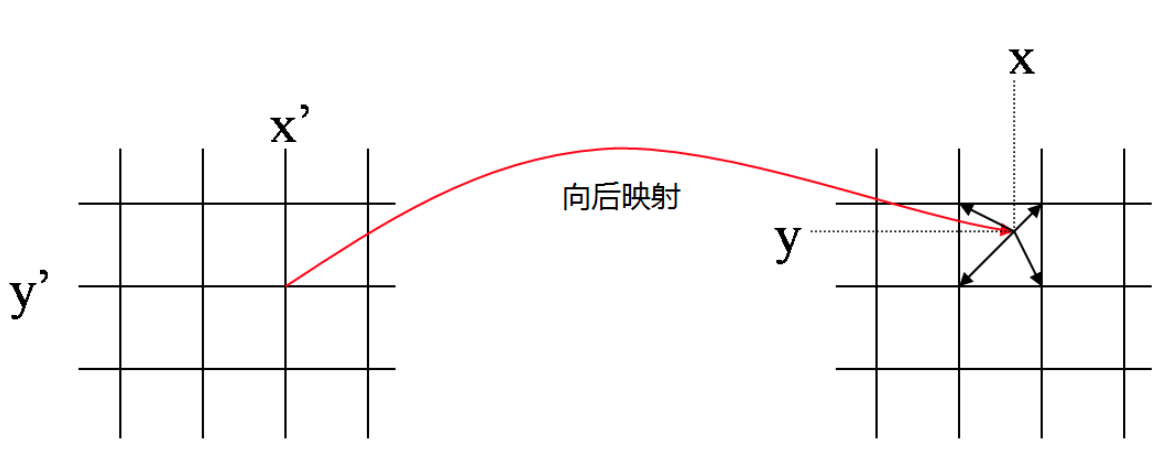
向后映射法就比较直观。在这种情况下,我们知道输出图像上整数点位置(x’,y’)在变换前位于输入图像上的位置(x,y),一般来说这是个非整数点位置,利用其周围整数点位置的输入图像像素值进行插值,就得到了该点的像素值。我们遍历输出图像,经过坐标变换、插值两步操作,我们就能将其像素值一个个地计算出来,因此向后映射又叫图像填充映射。如下图所示。
以双线性插值为例,对反向映射而言,系数之和 ( 1 − u 0 ) ( 1 − v 0 ) + u 0 ( 1 − v 0 ) + ( 1 − u 0 ) v 0 + u 0 v 0 (1-u_0)(1-v_0)+u_0(1-v_0)+(1-u_0)v_0+u_0v_0 (1−u0)(1−v0)+u0(1−v0)+(1−u0)v0+u0v0 为1。
原图像和输出图像几何中心的对齐
如果按照上面的方法进行双线性插值,你会发现计算出来的结果和matlab、openCV对应的resize()函数得到的结果不一样。那这个究竟是怎么回事呢?
其实答案很简单,就是坐标系的选择问题,或者说源图像和目标图像之间的对应问题。
以图像缩小为例说明问题。假设源图像大小为w1xh1,目标图像为w2xh2。那么两幅图像的边长比分别为:w1/w2和h1/h2。目标图像的像素点(j, i)(第i行j列)可以通过边长比对应回源图像。其对应坐标为( j ∗ w 1 / w 2 , i ∗ w 1 / w 2 j*w1/w2, i*w1/w2 j∗w1/w2,i∗w1/w2 )。
float u = j*w1/w2;
float v = i*w1/w2;
注意:我们的坐标是从0开始的,即640x480大小的图像,它的宽和高取值范围分别是[0, 639]和[0,479]。这个坐标对齐于左上角,但不是几何中心对齐的,会有问题,每进行一个未对齐的处理,都会使得图像往左上角偏移一点点,下面会进行说明。
这样的计算会使得像素映射回原图偏左上角。例如当原图像大小为5x5,目标图像为3x3时,映射关系如下,为了方便,这里只画出了图像的第一行:
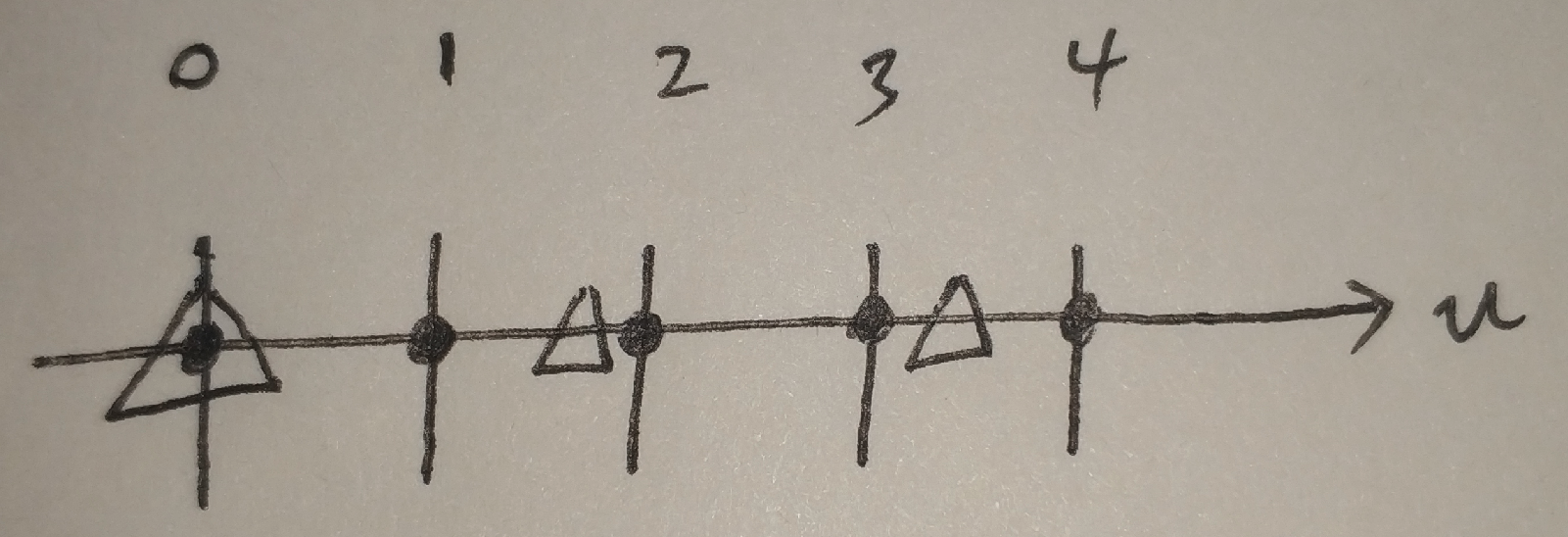
上图中,黑点表示原图第一行的5个像素,三角形表示目标图第一行的3个像素映射回原图所在的位置。有没有发现有一点奇怪?目标图像的像素值是在原图中靠左位置取的。而实际上,我们都知道,正确的方式应该如下图:
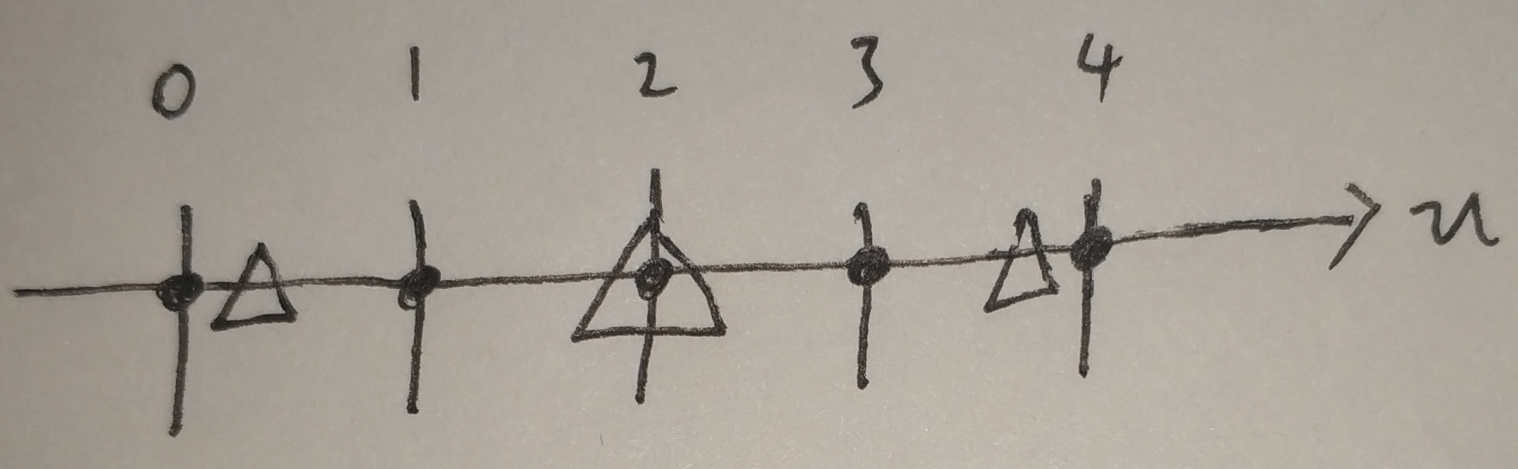
后面这幅图是把图像几何中心对齐了的,那么如何才能得到这种正确的映射关系呢?我们可以看一看,为什么原来的坐标映射关系会出错。
因为图像坐标从0开始,要想几何中心对齐,意味着3x3图像中间元素(u=1)要和5x5图像中间元素(u=2)重合,但是按照前面的计算公式, u = j ∗ w 1 / w 2 ; u = j*w1/w2; u=j∗w1/w2; 可以得到
3x3图像中间元素(u=1)在5x5图像中的坐标为1.666,没有和u=2对齐。这一切的错误的源头正是因为图像坐标从0开始!这导致了图像右边界坐标永远比宽要少1,即宽640图像的坐标最大只有639。
要解决这个问题,我们只需要将图像坐标从0.5开始即可。这样处理后,对于640宽的图像,图像左边界为0.5,与0相差0.5;图像右边界为639.5,与640差0.5;这样就对齐了。这样子处理后,要想几何中心对齐,意味着3x3图像中间元素(u=1.5)要和5x5图像中间元素(u=2.5)重合,按照前面的计算公式, u = j ∗ w 1 / w 2 ; u = j*w1/w2; u=j∗w1/w2; 正好可以得到3x3图像中间元素(u=1.5)在5x5图像中的坐标为2.5,对齐了。
到目前为止,我们通过转换坐标系的原点,使得原图像与输出图像几何中心能够对齐,但是还存在一个小问题。那就是我们的计算机存储图像都是从坐标0开始,我们以0.5作为起始点的坐标体系,在计算机这里是不兼容的,所以,当我们计算得到2.5以后,还需要再进行一个坐标转换,将坐标转为从0开始。这同样很好处理,对得到的结果减0.5即可(2.5-0.5=2)。
最终,我们的映射公式改为如下:
// 原来是这样
float u = j*w1/w2;
float v = i*w1/w2;
// 现在改为这样
float u = (j+0.5)*w1/w2 - 0.5;
float v = (i+0.5)*w1/w2 - 0.5;
至此,几何中心不对齐的问题得到解决,回顾一下我们的方法,整个流程如下:
注意:几何中心对齐后,放大图像时,坐标0会映射回原图的负值。
优化方法
思路:浮点数–>整数,这样对于乘法操作就从浮点运算–>整数运算;此外,在浮点数–>整数过程中,我们也使用左右位移运算实现,可以快一点。
代码实现
完整可执行工程在这里。
**未优化速度版本:**坐标大于宽高或小于0的处理不太合理,暂时先这样吧。
将对齐的结果、未对齐的结果和opencv的结果做对比,可以发现未对齐图像每次放大后都会往左上角偏移。
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <iostream>
#include <math.h>
using namespace std;
using namespace cv;
// bilinear
// x方向放大倍数rx
// y方向放大倍数ry
cv::Mat bilinear(cv::Mat img, double rx, double ry, bool is_align){
// get height and width
int width = img.cols;
int height = img.rows;
int channel = img.channels();
// get resized shape
int resized_width = (int)(width * rx);
int resized_height = (int)(height * ry);
int x_before, y_before;
double dx, dy;
double val;
// output image
cv::Mat out = cv::Mat::zeros(resized_height, resized_width, CV_8UC3);
// bi-linear interpolation
for (int y = 0; y < resized_height; y++){
if(is_align){
// 对齐几何中心
dy = (y+0.5)/ry - 0.5;
}
else{
// 没对齐几何中心
dy = y / ry;
}
y_before = (int)floor(dy);
dy -= y_before;
y_before = fmin(y_before, height - 1);
y_before = max(y_before, 0);
for (int x = 0; x < resized_width; x++){
if(is_align){
// 对齐几何中心
dx = ((x+0.5)/rx - 0.5);
}
else{
// 没对齐几何中心
dx = x / rx;
}
x_before = (int)floor(dx);
dx -= x_before;
x_before = min(x_before, width - 1);
x_before = max(x_before, 0);
// compute bi-linear
for (int c = 0; c < channel; c++){
val = (1. - dx) * (1. - dy) * img.at<cv::Vec3b>(y_before, x_before)[c];
if(y_before + 1 < height){
val += (1. - dx) * dy * img.at<cv::Vec3b>(y_before + 1, x_before)[c];
if(x_before + 1 < width){
val += dx * dy * img.at<cv::Vec3b>(y_before + 1, x_before + 1)[c];
}
}
if(x_before + 1 < width){
val += dx * (1. - dy) * img.at<cv::Vec3b>(y_before, x_before + 1)[c];
}
// assign pixel to new position
out.at<cv::Vec3b>(y, x)[c] = (uchar)val;
}
}
}
return out;
}
int main(int argc, const char* argv[]){
// read image
cv::Mat img = cv::imread("../imori.jpg", cv::IMREAD_COLOR);
// bilinear
cv::Mat out = bilinear(img, 10.0, 10.0, false);
cv::Mat out_align = bilinear(img, 10.0, 10.0, true);
//cv::imwrite("out.jpg", out);
cv::imshow("out", out);
cv::imshow("out_align", out_align);
cv::waitKey(0);
int aa;
cin >> aa;
cv::destroyAllWindows();
return 0;
}
优化速度版本:
有空再写。