本读书笔记分成两部分,书籍原句摘抄和知识整理,本章感悟。
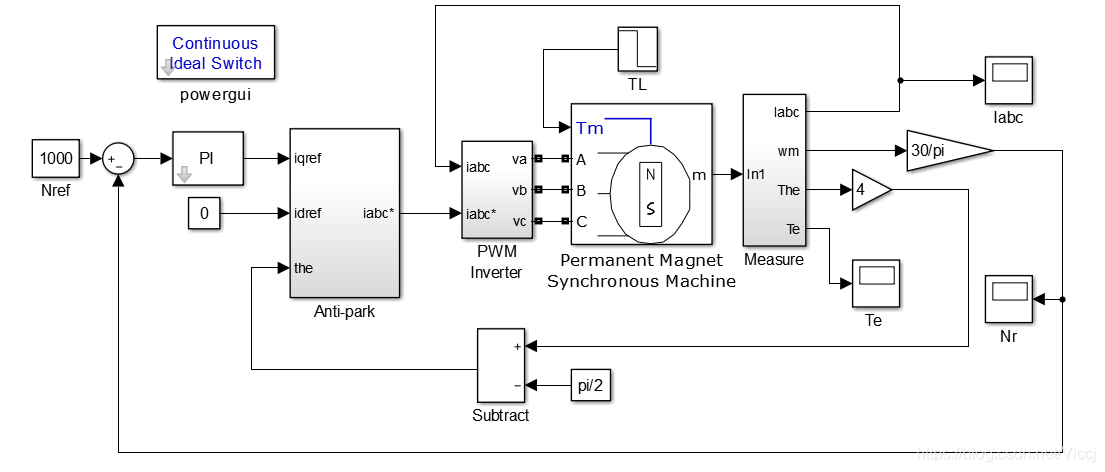
书籍原句摘抄和知识整理 第三章 三相永磁电机的矢量控制
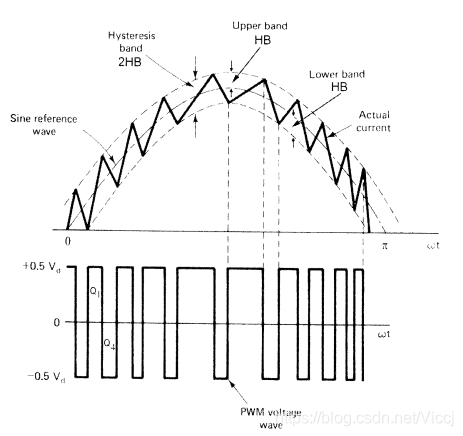
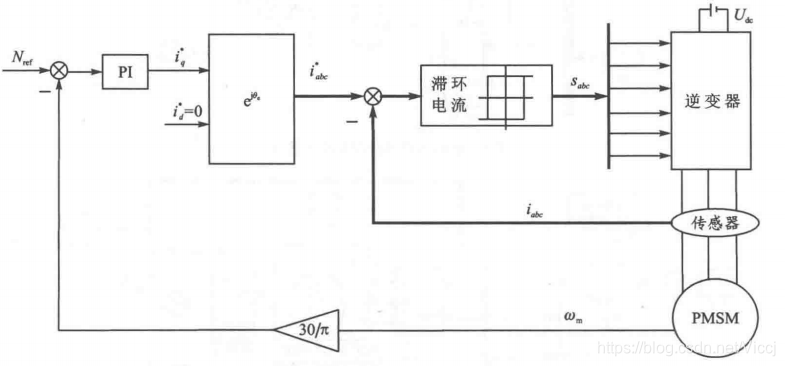
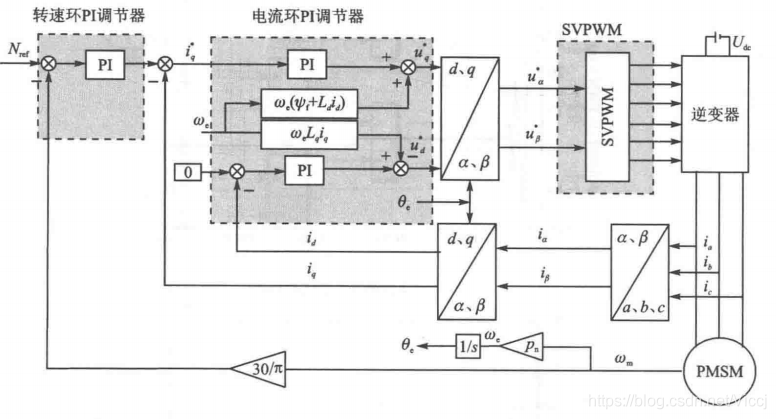
对于三相 PMSM 矢量控制技术而言,通常包括转速控制环、电流控制环和 PWM 控制算法 3 个主要部分 。其中,转速控制环的作用是控制电机的转速,使其能够达到既能调速又能稳速的目的;而电流控制环的作用在于加快系统的动态调节过程,使得电机定子电流更好地接近给定的电流矢量 。
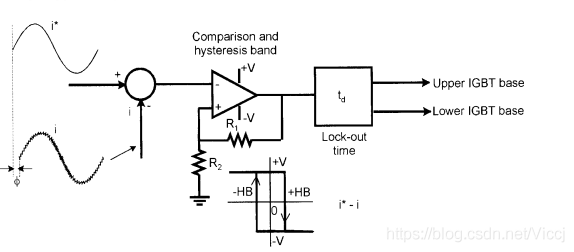
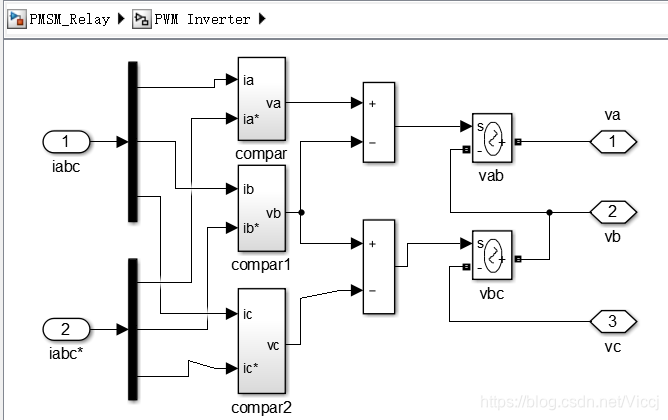
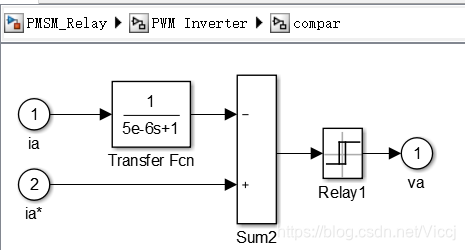
3.1.1 滞环电流控制的基本原理
i
a
b
c
∗
i_{abc^{*}}
i a b c ∗
i
a
b
c
∗
i_{abc^{*}}
i a b c ∗
i
a
b
c
i_{abc}
i a b c
V
a
b
c
V_{abc}
V a b c
L
d
=
L
q
=
8.5
m
H
L_d= L_q=8.5mH
L d = L q = 8 . 5 m H
Ψ
f
=
0.175
W
b
\Psi_f= 0.175Wb
Ψ f = 0 . 1 7 5 W b
K
p
=
0.06
,
K
i
=
1
K_p=0.06,K_i=1
K p = 0 . 0 6 , K i = 1
1
5
e
−
6
s
+
1
\frac{1}{5e-6s+1}
5 e − 6 s + 1 1
目前传统的矢量控制常见的方法有
i
d
=
0
i_d=0
i d = 0
i
d
=
0
i_d=0
i d = 0
J
d
ω
m
d
t
=
T
e
−
T
L
−
B
ω
m
J\frac{\mathrm{d} {\omega_m}}{\mathrm{d} t}=T_e-T_L-B\omega_m
J d t d ω m = T e − T L − B ω m
T
e
=
3
2
p
n
i
q
[
i
d
(
L
d
−
L
q
)
+
Ψ
f
]
T_e=\frac{3}{2}p_ni_q[i_d(L_d-L_q)+\Psi_f]
T e = 2 3 p n i q [ i d ( L d − L q ) + Ψ f ]
i
q
=
i
q
′
+
B
a
ω
m
i_q=i_q^{'}+B_a\omega_m
i q = i q ′ + B a ω m
i
d
=
0
i_d=0
i d = 0
T
L
=
0
T_L=0
T L = 0
d
ω
m
d
t
=
1.5
p
n
Ψ
f
J
(
i
q
′
−
B
a
ω
m
)
−
B
J
ω
m
\frac{\mathrm{d} {\omega_m}}{\mathrm{d} t}=\frac{1.5p_n\Psi_f}{J}(i_q^{'}-B_a\omega_m)-\frac{B}{J}\omega_m
d t d ω m = J 1 . 5 p n Ψ f ( i q ′ − B a ω m ) − J B ω m
β
\beta
β
ω
m
(
s
)
=
1.5
p
n
Ψ
f
/
J
s
+
β
i
q
′
(
s
)
\omega_m(s)=\frac{1.5p_n\Psi_f/J}{s+\beta}i_q^{'}(s)
ω m ( s ) = s + β 1 . 5 p n Ψ f / J i q ′ ( s )
B
a
=
β
J
−
B
1.5
p
n
Ψ
f
B_a=\frac{\beta J-B}{1.5p_n\Psi_f}
B a = 1 . 5 p n Ψ f β J − B
i
q
∗
=
(
K
p
ω
+
K
i
ω
s
)
(
ω
m
∗
−
ω
m
)
−
B
a
ω
m
i_q^{*}=(K_{p\omega}+\frac{K_{i\omega}}{s})(\omega_m^{*}-\omega_m)-B_a\omega_m
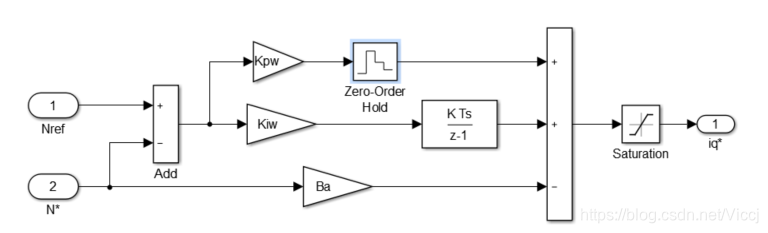
i q ∗ = ( K p ω + s K i ω ) ( ω m ∗ − ω m ) − B a ω m
K
p
ω
,
K
i
ω
K_{p\omega},K_{i\omega}
K p ω , K i ω
{
K
p
ω
=
β
J
1.5
p
n
Ψ
f
K
i
ω
=
β
K
p
ω
\left\{\begin{matrix} K_{p\omega}=\frac{\beta J}{1.5p_n\Psi_f} \\ \\K_{i\omega}= \beta K_{p\omega} \end{matrix}\right.
⎩ ⎨ ⎧ K p ω = 1 . 5 p n Ψ f β J K i ω = β K p ω
β
\beta
β
{
d
i
d
d
t
=
−
R
L
i
d
+
L
q
L
d
ω
e
i
q
+
1
L
d
u
d
d
i
q
d
t
=
−
R
L
i
d
−
1
L
q
ω
e
(
L
d
i
d
+
Ψ
f
)
+
1
L
q
u
q
\left\{\begin{matrix} \frac{\mathrm{d} {i_d}}{\mathrm{d} t}=-\frac{R}{L}i_d+\frac{L_q}{L_d}\omega_e i_q+\frac{1}{L_d} u_d \\\frac{\mathrm{d} {i_q}}{\mathrm{d} t}=-\frac{R}{L}i_d-\frac{1}{L_q}\omega_e(L_d i_d +\Psi_f)+\frac{1}{L_q} u_q \end{matrix}\right.
{ d t d i d = − L R i d + L d L q ω e i q + L d 1 u d d t d i q = − L R i d − L q 1 ω e ( L d i d + Ψ f ) + L q 1 u q
i
d
,
i
q
i_d,i_q
i d , i q
i
d
,
i
q
i_d,i_q
i d , i q
{
u
d
0
=
u
d
+
ω
e
L
q
i
q
=
R
i
d
+
d
i
d
d
t
u
q
0
=
u
q
−
ω
e
(
L
d
i
d
+
Ψ
f
)
=
R
i
q
+
L
q
d
i
q
d
t
\left\{\begin{matrix} u_{d0}=u_d+\omega_e L_q i_q=R i_d+ \frac{\mathrm{d} {i_d}}{\mathrm{d} t} \\ u_{q0}=u_q-\omega_e(L_d i_d +\Psi_f)=R i_q+ L_q \frac{\mathrm{d} {i_q}}{\mathrm{d} t} \end{matrix}\right.
{ u d 0 = u d + ω e L q i q = R i d + d t d i d u q 0 = u q − ω e ( L d i d + Ψ f ) = R i q + L q d t d i q
u
d
0
,
u
q
0
u_{d0},u_{q0}
u d 0 , u q 0
Y
(
s
)
=
G
(
s
)
U
(
s
)
Y_{(s)}=G_{(s)}U_{(s)}
Y ( s ) = G ( s ) U ( s )
U
(
s
)
=
[
u
d
0
(
s
)
u
q
0
(
s
)
]
U_{(s)}=\begin{bmatrix} u_{d0(s)} \\ u_{q0(s)} \end{bmatrix}
U ( s ) = [ u d 0 ( s ) u q 0 ( s ) ]
Y
(
s
)
=
[
i
d
0
(
s
)
i
q
0
(
s
)
]
Y_{(s)}=\begin{bmatrix} i_{d0(s)} \\ i_{q0(s)} \end{bmatrix}
Y ( s ) = [ i d 0 ( s ) i q 0 ( s ) ]
G
(
s
)
=
[
R
+
s
L
d
0
0
R
+
s
L
q
]
G_{(s)}=\begin{bmatrix} R+s L_d & 0 \\ 0 & R+sL_q \end{bmatrix}
G ( s ) = [ R + s L d 0 0 R + s L q ]
{
u
d
∗
=
(
K
p
d
+
K
i
d
s
)
(
i
d
∗
−
i
d
)
−
ω
e
L
q
i
q
u
q
∗
=
(
K
p
q
+
K
i
q
s
)
(
i
q
∗
−
i
q
)
−
ω
e
(
L
d
i
d
+
Ψ
f
)
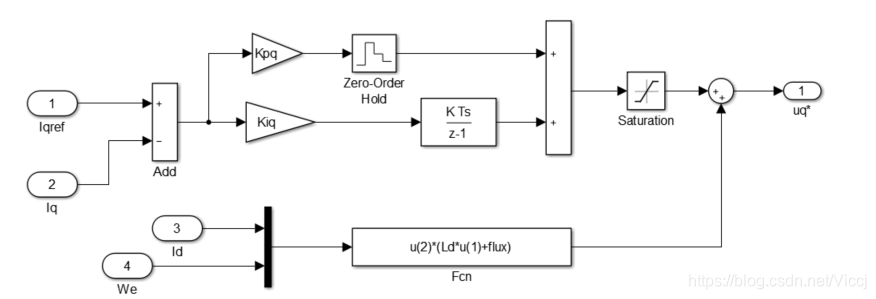
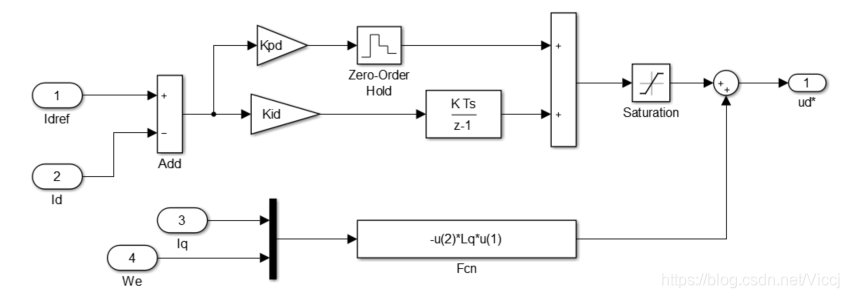
\left\{\begin{matrix} u_{d}^{*}=(K_{pd}+\frac{K_{id}}{s})(i^{*}_d - i_d)-\omega_e L_q i_q \\ u_{q}^{*}=(K_{pq}+\frac{K_{iq}}{s})(i^{*}_q - i_q)-\omega_e (L_d i_d +\Psi_f) \end{matrix}\right.
{ u d ∗ = ( K p d + s K i d ) ( i d ∗ − i d ) − ω e L q i q u q ∗ = ( K p q + s K i q ) ( i q ∗ − i q ) − ω e ( L d i d + Ψ f )
F
(
s
)
=
[
I
−
C
(
s
)
G
(
s
)
]
−
1
C
(
s
)
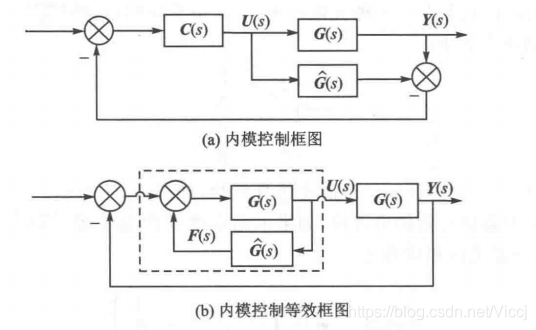
F(s)=[I-C(s)G(s)]^{-1}C(s)
F ( s ) = [ I − C ( s ) G ( s ) ] − 1 C ( s )
G
^
(
s
)
=
G
(
s
)
\widehat G(s) = G(s)
G
( s ) = G ( s )
G
c
(
s
)
=
G
(
s
)
C
(
s
)
(
1
)
G_c(s)=G(s)C(s) (1)
G c ( s ) = G ( s ) C ( s ) ( 1 )
G
^
(
s
)
=
G
(
s
)
\widehat G(s) = G(s)
G
( s ) = G ( s )
C
(
s
)
=
G
−
1
(
s
)
L
(
s
)
C(s)=G^{-1}(s)L(s)
C ( s ) = G − 1 ( s ) L ( s )
L
(
s
)
=
α
I
/
(
s
+
α
)
L(s)=\alpha I /(s+\alpha)
L ( s ) = α I / ( s + α )
α
\alpha
α
F
(
s
)
=
α
[
L
d
+
R
s
0
0
L
q
+
R
s
]
F(s)=\alpha\begin{bmatrix}L_d+\frac{R}{s}&0 \\ 0&L_q+\frac{R}{s} \end{bmatrix}
F ( s ) = α [ L d + s R 0 0 L q + s R ]
G
c
(
s
)
=
α
s
+
α
G_c(s)=\frac{\alpha }{s+\alpha}
G c ( s ) = s + α α
t
r
e
s
t_{res}
t r e s
α
\alpha
α
t
r
e
s
t_{res}
t r e s
t
r
e
s
=
l
n
9
/
α
t_{res}=ln9/\alpha
t r e s = l n 9 / α
α
\alpha
α
t
r
e
s
t_{res}
t r e s
α
\alpha
α
α
\alpha
α
α
\alpha
α
{
T
d
=
L
d
R
T
q
=
L
q
R
\left\{\begin{matrix} T_d=\frac{L_d}{R} \\ \\T_q=\frac{L_q}{R} \end{matrix}\right.
⎩ ⎨ ⎧ T d = R L d T q = R L q
三相PMSM 是一个非线性、强藕合的多变量系统,当控制系统受到外界扰动的影响或电机内部参数发生变化时三相永磁交流调速,采用传统的 P l 调节器并不能满足实际的要求实际的要求 。 因此利用滑模控制( Sliding Mode Control, SMC)对扰动与参数不敏感、 响应速度快等优点。
3.4.2 清模速度控制器的设计
{
u
d
=
R
i
d
+
L
s
d
i
d
d
t
−
p
n
ω
m
L
s
i
q
u
q
=
R
i
q
+
L
s
d
i
q
d
t
+
p
n
ω
m
L
s
i
d
+
p
n
ω
m
Ψ
f
J
d
ω
m
d
t
=
3
2
p
n
Ψ
f
i
q
−
T
L
\left\{\begin{matrix} u_d=R i_d+L_s\frac{\mathrm{d} {i_d}}{\mathrm{d} t}-p_n\omega_m L_s i_q \\ \\u_q=R i_q+L_s\frac{\mathrm{d} {i_q}}{\mathrm{d} t} + p_n \omega_m L_s i_d +p_n \omega_m \Psi_f \\ \\J\frac{\mathrm{d} {\omega_m}}{\mathrm{d} t} = \frac{3}{2} p_n \Psi_f i_q -T_L \end{matrix}\right.
⎩ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎧ u d = R i d + L s d t d i d − p n ω m L s i q u q = R i q + L s d t d i q + p n ω m L s i d + p n ω m Ψ f J d t d ω m = 2 3 p n Ψ f i q − T L
L
s
L_s
L s
i
d
=
0
i_d=0
i d = 0
{
d
i
q
d
t
=
1
L
s
(
−
R
i
q
−
p
n
Ψ
f
ω
m
+
u
q
)
d
ω
m
d
t
=
1
J
(
−
T
L
+
3
p
n
Ψ
f
2
i
q
)
\left\{\begin{matrix} \frac{\mathrm{d} {i_q}}{\mathrm{d} t}=\frac{1}{L_s}(-Ri_q-p_n \Psi_f \omega_m + u_q) \\ \\\frac{\mathrm{d} {\omega_m}}{\mathrm{d} t}=\frac{1}{J}(-T_L + \frac{3 p_n \Psi_f }{2} i_q) \\ \end{matrix}\right.
⎩ ⎨ ⎧ d t d i q = L s 1 ( − R i q − p n Ψ f ω m + u q ) d t d ω m = J 1 ( − T L + 2 3 p n Ψ f i q )
{
x
1
=
ω
r
e
f
−
ω
m
x
2
=
x
1
˙
=
−
ω
m
\left\{\begin{matrix} x_1=\omega_{ref}-\omega_m \\ \\x_2=\dot{x_1}=-\omega_m \\ \end{matrix}\right.
⎩ ⎨ ⎧ x 1 = ω r e f − ω m x 2 = x 1 ˙ = − ω m
ω
r
e
f
\omega_{ref}
ω r e f
ω
m
\omega_{m}
ω m
{
x
1
˙
=
−
ω
m
˙
=
1
J
(
T
L
−
3
p
n
Ψ
f
2
i
q
)
x
2
˙
=
−
ω
m
¨
=
−
3
p
n
Ψ
f
2
J
i
q
\left\{\begin{matrix} \dot{x_1}=-\dot{\omega_m}=\frac{1}{J}(T_L - \frac{3 p_n \Psi_f }{2} i_q) \\ \\\dot{x_2}=-\ddot{\omega_m}=-\frac{3 p_n \Psi_f }{2 J} i_q \\ \end{matrix}\right.
⎩ ⎨ ⎧ x 1 ˙ = − ω m ˙ = J 1 ( T L − 2 3 p n Ψ f i q ) x 2 ˙ = − ω m ¨ = − 2 J 3 p n Ψ f i q
u
=
i
˙
q
,
D
=
3
p
n
Ψ
f
2
J
u=\dot i_q,D=\frac{3 p_n \Psi_f }{2 J}
u = i ˙ q , D = 2 J 3 p n Ψ f
[
x
1
˙
x
2
˙
]
=
[
0
1
0
0
]
[
x
1
x
2
]
+
[
0
−
D
]
u
\begin{bmatrix}\dot{x_1}\\\dot{x_2} \end{bmatrix}=\begin{bmatrix} 0&1\\0&0 \end{bmatrix}\begin{bmatrix} {x_1}\\{x_2} \end{bmatrix}+\begin{bmatrix} 0\\-D \end{bmatrix}u
[ x 1 ˙ x 2 ˙ ] = [ 0 0 1 0 ] [ x 1 x 2 ] + [ 0 − D ] u
s
=
c
x
1
+
x
2
s=c x_1+x_2
s = c x 1 + x 2
c
>
0
c>0
c > 0
s
˙
=
c
x
1
˙
+
x
2
˙
=
c
x
2
+
x
2
˙
=
c
x
2
−
D
u
\dot s=c \dot{x_1} + \dot{x_2}=c x_2 + \dot{x_2}=c {x_2} -Du
s ˙ = c x 1 ˙ + x 2 ˙ = c x 2 + x 2 ˙ = c x 2 − D u
u
=
1
D
[
c
x
2
+
ε
s
g
n
(
s
)
+
q
s
]
u=\frac{1}{D}[c x_2+ \varepsilon sgn(s)+qs]
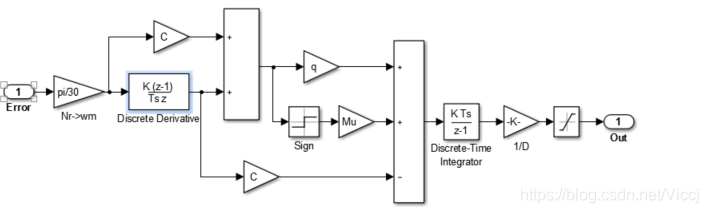
u = D 1 [ c x 2 + ε s g n ( s ) + q s ]
i
q
∗
=
1
D
∫
0
t
[
c
x
2
+
ε
s
g
n
(
s
)
+
q
s
]
d
τ
i_q^*=\frac{1}{D}\int_{0}^{t}[c x_2+ \varepsilon sgn(s)+qs]\mathrm{d}\tau
i q ∗ = D 1 ∫ 0 t [ c x 2 + ε s g n ( s ) + q s ] d τ
s
s
˙
=
0
s\dot{s}=0
s s ˙ = 0
s
=
c
x
1
+
x
2
s=c x_1+x_2
s = c x 1 + x 2
c
x
2
+
ε
s
g
n
(
s
)
+
q
s
c x_2+ \varepsilon sgn(s)+qs
c x 2 + ε s g n ( s ) + q s
u
=
1
D
∫
0
t
[
中
间
部
分
]
d
τ
u=\frac{1}{D}\int_{0}^{t}[中间部分]\mathrm{d}\tau
u = D 1 ∫ 0 t [ 中 间 部 分 ] d τ
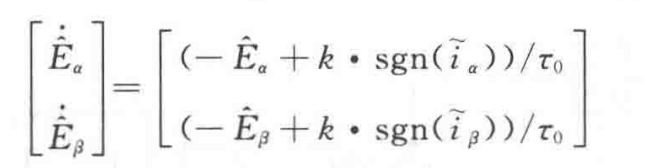
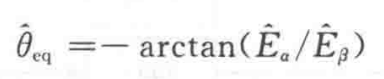
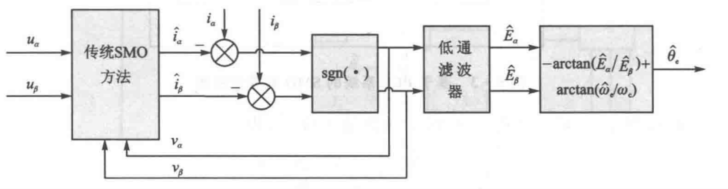
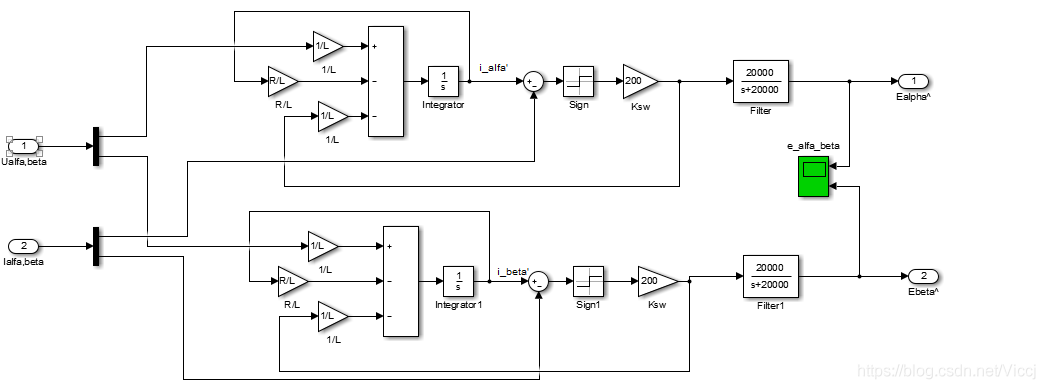
大多数传统 SMO 算法的设计是基于静止坐标系下的数学模型的,重写电机的电压方程为
[
u
α
u
β
]
=
[
R
+
p
L
d
ω
e
(
L
d
−
L
q
)
−
ω
e
(
L
d
−
L
q
)
R
+
p
L
q
]
[
i
α
i
β
]
+
[
E
α
E
β
]
\begin{bmatrix}u_\alpha \\u_\beta \end{bmatrix}=\begin{bmatrix}R+p L_d && \omega _e(L_d-L_q) \\-\omega_e(L_d-L_q) && R+pL_q \end{bmatrix}\begin{bmatrix}i_\alpha \\i_\beta \end{bmatrix}+\begin{bmatrix}E_\alpha \\E_\beta \end{bmatrix}
[ u α u β ] = [ R + p L d − ω e ( L d − L q ) ω e ( L d − L q ) R + p L q ] [ i α i β ] + [ E α E β ]
L
d
,
L
q
L_d,L_q
L d , L q
ω
e
\omega_e
ω e
p
=
d
d
t
p= \frac{\mathrm{d} }{\mathrm{d} t}
p = d t d
[
E
α
E
β
]
T
\begin{bmatrix}E_\alpha && E_\beta \end{bmatrix}^T
[ E α E β ] T
[
E
α
E
β
]
=
[
(
L
d
−
L
q
)
(
ω
e
i
d
−
p
i
q
)
+
ω
e
Ψ
f
]
[
−
s
i
n
Θ
e
c
o
s
θ
e
]
\begin{bmatrix}E_\alpha \\E_\beta \end{bmatrix}=[(L_d-L_q)(\omega_e i_d-pi_q)+\omega_e\Psi_f]\begin{bmatrix}-sin\Theta_e \\cos\theta_e \end{bmatrix}
[ E α E β ] = [ ( L d − L q ) ( ω e i d − p i q ) + ω e Ψ f ] [ − s i n Θ e c o s θ e ]
对于表贴式三相 PMSM(
L
d
=
L
q
=
L
s
L_d=L_q=L_s
L d = L q = L s
L
d
≠
L
q
L_d\neq L_q
L d = L q
d
d
t
[
i
α
i
β
]
=
A
[
i
α
i
β
]
+
1
L
d
[
u
α
u
β
]
−
1
L
d
[
E
α
E
β
]
\frac{\mathrm{d} }{\mathrm{d} t}\begin{bmatrix}i_\alpha \\i_\beta \end{bmatrix}=A\begin{bmatrix}i_\alpha \\i_\beta \end{bmatrix}+\frac{1}{L_d}\begin{bmatrix}u_\alpha \\u_\beta \end{bmatrix}-\frac{1}{L_d}\begin{bmatrix}E_\alpha \\E_\beta \end{bmatrix}
d t d [ i α i β ] = A [ i α i β ] + L d 1 [ u α u β ] − L d 1 [ E α E β ]
A
=
1
L
d
[
−
R
−
(
−
L
d
−
L
q
)
ω
e
(
L
d
−
L
q
)
ω
e
−
R
]
A= \frac{1}{L_d}\begin{bmatrix}-R && -(-L_d-L_q)\omega_e \\(L_d-L_q)\omega_e && -R \end{bmatrix}
A = L d 1 [ − R ( L d − L q ) ω e − ( − L d − L q ) ω e − R ]
d
d
t
[
i
α
^
i
β
^
]
=
A
[
i
α
^
i
β
^
]
+
1
L
d
[
u
α
u
β
]
−
1
L
d
[
v
α
v
β
]
\frac{\mathrm{d} }{\mathrm{d} t}\begin{bmatrix}\widehat{i_\alpha} \\\widehat{i_\beta} \end{bmatrix}=A\begin{bmatrix}\widehat{i_\alpha} \\\widehat{i_\beta} \end{bmatrix}+\frac{1}{L_d}\begin{bmatrix}u_\alpha \\u_\beta \end{bmatrix}-\frac{1}{L_d}\begin{bmatrix}v_\alpha \\v_\beta \end{bmatrix}
d t d [ i α
i β
] = A [ i α
i β
] + L d 1 [ u α u β ] − L d 1 [ v α v β ]
i
α
^
,
i
β
^
\widehat{i_\alpha} ,\widehat{i_\beta}
i α
, i β
u
α
,
u
β
u_\alpha,u_\beta
u α , u β
d
d
t
[
i
α
~
i
β
~
]
=
A
[
i
α
~
i
β
~
]
+
1
L
d
[
E
α
−
v
α
E
β
−
v
β
]
\frac{\mathrm{d} }{\mathrm{d} t}\begin{bmatrix}\widetilde{i_\alpha} \\\widetilde{i_\beta} \end{bmatrix}=A\begin{bmatrix}\widetilde{i_\alpha} \\\widetilde{i_\beta} \end{bmatrix}+ \frac{1}{L_d}\begin{bmatrix}E_\alpha-v_\alpha \\E_\beta-v_\beta \end{bmatrix}
d t d [ i α
i β
] = A [ i α
i β
] + L d 1 [ E α − v α E β − v β ]
i
α
~
=
i
α
^
−
i
α
,
i
β
~
=
i
β
^
−
i
β
\widetilde{i_\alpha}=\widehat{i_\alpha}-i_\alpha,\widetilde{i_\beta}=\widehat{i_\beta}-i_\beta
i α
= i α
− i α , i β
= i β
− i β
[
v
α
v
β
]
=
[
k
s
g
n
(
i
α
^
−
i
α
)
k
s
g
n
(
i
β
^
−
i
β
)
]
\begin{bmatrix}v_\alpha \\v_\beta \end{bmatrix}=\begin{bmatrix}k sgn(\widehat{i_\alpha}- i\alpha) \\k sgn(\widehat{i_\beta}- i_\beta) \end{bmatrix}
[ v α v β ] = [ k s g n ( i α
− i α ) k s g n ( i β
− i β ) ]
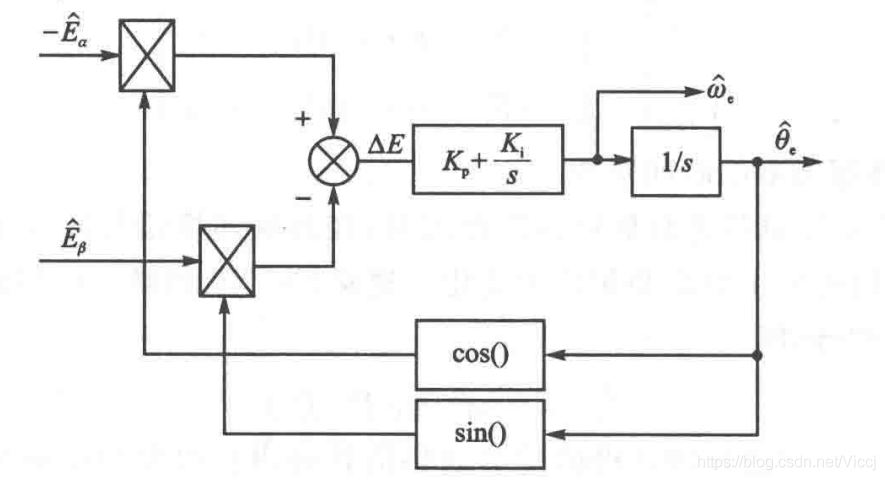
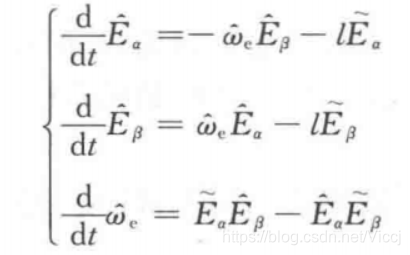
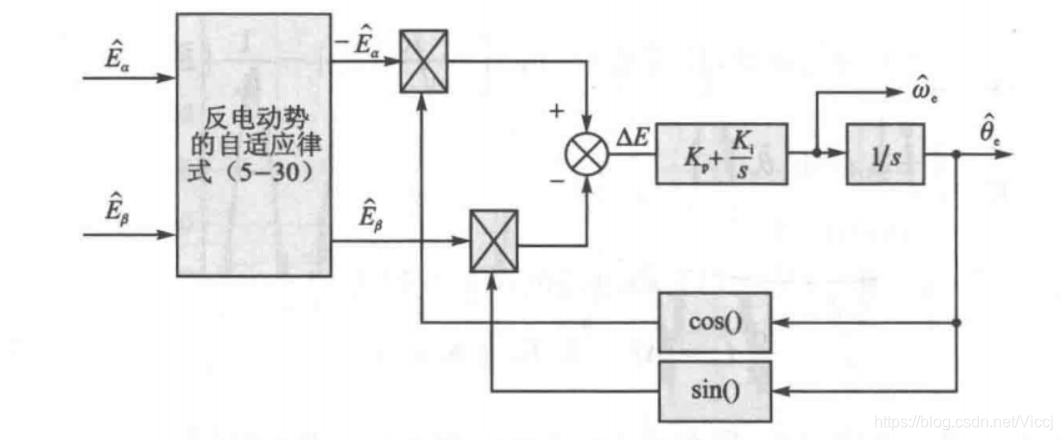
基于锁相环的转子位置估计 自适应清模观测器设计
d
d
t
i
s
=
A
i
s
+
B
u
s
+
K
e
E
s
\frac{\mathrm{d} }{\mathrm{d} t}i_s=Ai_s+Bu_s+K_eE_s
d t d i s = A i s + B u s + K e E s
A
=
[
−
R
L
s
0
0
−
R
L
s
]
A=\begin{bmatrix}-\frac{R}{L_s} && 0 \\0 && -\frac{R}{L_s} \end{bmatrix}
A = [ − L s R 0 0 − L s R ]
B
=
[
−
1
L
s
0
0
−
1
L
s
]
B=\begin{bmatrix}-\frac{1}{L_s} && 0 \\0 && -\frac{1}{L_s} \end{bmatrix}
B = [ − L s 1 0 0 − L s 1 ]
K
e
=
[
−
R
L
s
0
0
−
R
L
s
]
K_e=\begin{bmatrix}-\frac{R}{L_s} && 0 \\0 && -\frac{R}{L_s} \end{bmatrix}
K e = [ − L s R 0 0 − L s R ]
I
s
=
[
i
α
i
β
]
T
I_s= \begin {bmatrix} i_\alpha&&i_\beta \end{bmatrix}^{T}
I s = [ i α i β ] T
u
s
=
[
u
α
u
β
]
T
u_s= \begin {bmatrix} u_\alpha&& u_\beta \end{bmatrix}^{T}
u s = [ u α u β ] T
E
s
=
[
E
α
E
β
]
T
E_s= \begin {bmatrix} E_\alpha&& E_\beta \end{bmatrix}^{T}
E s = [ E α E β ] T
E
s
=
[
−
Ψ
f
ω
e
s
i
n
θ
e
Ψ
f
ω
e
c
o
s
θ
e
]
E_s= \begin {bmatrix} -\Psi_f \omega_e sin\theta_e\\ \Psi_f \omega_e cos\theta_e \end{bmatrix}
E s = [ − Ψ f ω e s i n θ e Ψ f ω e c o s θ e ]
d
d
t
,
i
s
^
=
A
,
i
s
^
+
B
u
s
+
K
e
,
E
s
^
+
K
s
i
g
n
(
s
)
\frac{\mathrm{d} }{\mathrm{d} t},\widehat{i_s}=A,\widehat{i_s}+Bu_s+K_e,\widehat{E_s}+Ksign(s)
d t d , i s
= A , i s
+ B u s + K e , E s
+ K s i g n ( s )
K
e
=
[
k
0
0
k
]
K_e=\begin{bmatrix}k && 0 \\0 && k \end{bmatrix}
K e = [ k 0 0 k ]
k
<
m
i
n
[
−
R
L
s
∣
i
α
~
∣
−
1
L
s
∣
E
α
~
∣
,
−
R
L
s
∣
i
β
~
∣
−
1
L
s
∣
E
β
~
∣
]
k<min[-\frac{R}{L_s}|\widetilde{i_\alpha}|-\frac{1}{L_s}|\widetilde{E_\alpha}|,-\frac{R}{L_s}|\widetilde{i_\beta }|-\frac{1}{L_s}|\widetilde{E_\beta }|]
k < m i n [ − L s R ∣ i α
∣ − L s 1 ∣ E α
∣ , − L s R ∣ i β
∣ − L s 1 ∣ E β
∣ ]
E
s
^
=
[
−
Ψ
f
ω
e
^
s
i
n
θ
e
^
Ψ
f
ω
e
^
c
o
s
θ
e
^
]
\widehat{E_s}= \begin {bmatrix} -\Psi_f \widehat{\omega_e} sin\widehat{\theta_e}\\ \Psi_f \widehat{\omega_e} cos\widehat{\theta_e} \end{bmatrix}
E s
= [ − Ψ f ω e
s i n θ e
Ψ f ω e
c o s θ e
]
d
d
t
i
s
~
=
A
i
s
~
+
K
e
E
s
~
+
K
s
i
g
n
(
s
)
\frac{\mathrm{d} }{\mathrm{d} t}\widetilde{i_s}=A\widetilde{i_s}+K_e\widetilde{E_s}+Ksign(s)
d t d i s
= A i s
+ K e E s
+ K s i g n ( s )
d
d
t
i
s
~
=
i
s
~
=
0
\frac{\mathrm{d} }{\mathrm{d} t}\widetilde{i_s}=\widetilde{i_s}=0
d t d i s
= i s
= 0
和我认知有矛盾的地方:3.1中作者把滞环电流控制归到了电流控制里,我认为滞环电流属于电流控制和PWM控制算法合体。
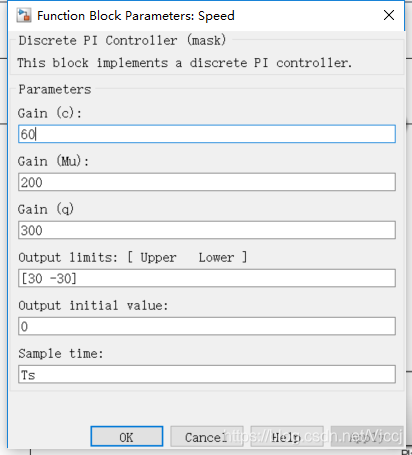
书中明确给出了参数整定的方法和步骤(和自动控制原理书的一致):
o
u
t
p
u
t
∗
=
(
K
p
+
K
i
s
)
(
i
n
p
u
t
∗
−
i
n
t
p
u
t
)
+
C
output^{*}=(K_{p}+\frac{K_{i}}{s})(input^{*}-intput)+C
o u t p u t ∗ = ( K p + s K i ) ( i n p u t ∗ − i n t p u t ) + C
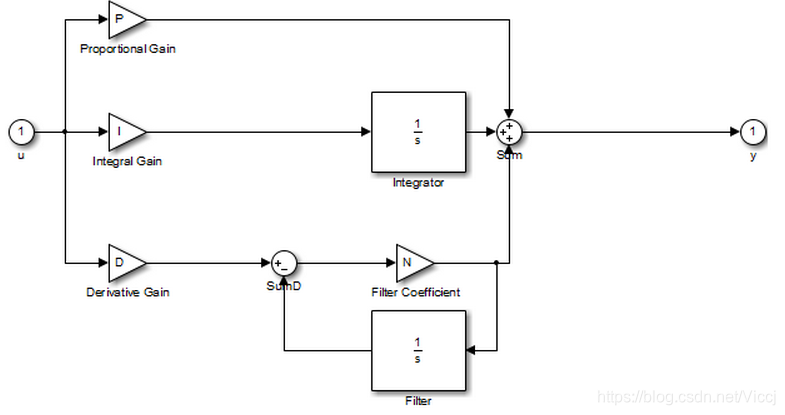
我用MATLAB-simulink库中标准的PID控制器代替上述那些非标的PI控制器,结果居然一模一样,有些颠覆我的观念。另外我所知的实际应用中PID控制器源码基本都是标准控制器。下图是标准PID控制器图