高精度地图
高精度地图概述
高精度地图高精度地图是apollo的核心,其可以实现厘米级的误差而非传统地图米级的误差。作为机器人环境中的地理地图,相当于将环境配置成为同人类一样的感知状态下,但是由于机器人记忆力远超人类的记忆力,所以他们可以记住每一个车道标识,而且相当细节。这是人类无法做到的。
高精度地图对于无人车的作用可分为两个大方面;
一是定位,高精度地图能让车辆精准的知道自己所处的位置,所以无论你的车身处何地,他都能获取到自己的位置,同样你也可以实时了解到他的位置。
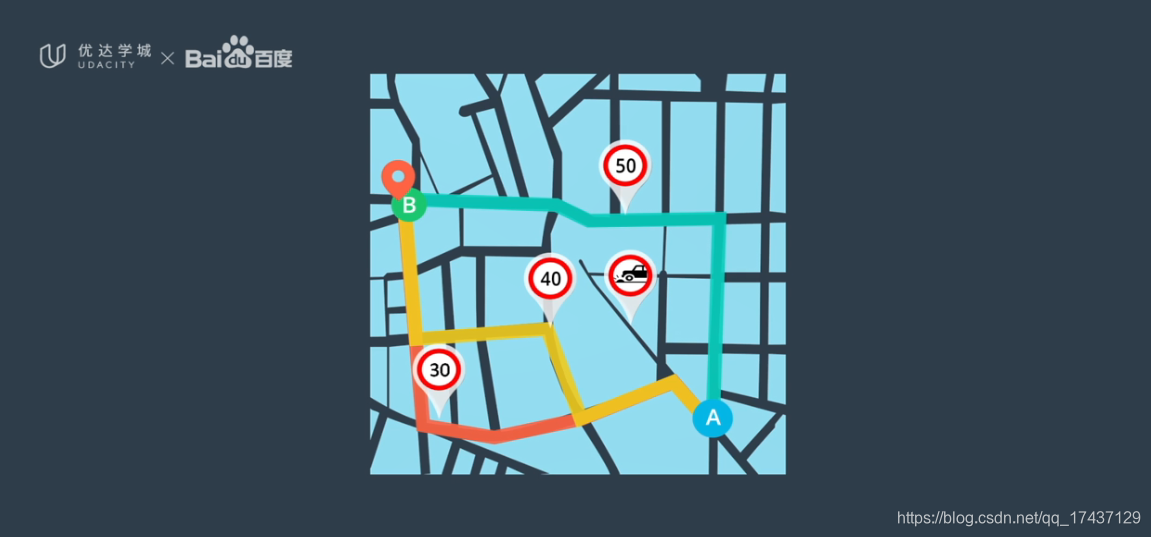
二是预先规划,你可以利用高精度地图提前对车辆将要行驶的路线进行规划,当他来到某个路口,他会按照你规划的右转执行动作。
高精度地图VS传统地图
传统地图
精度低,一般精度都在米级单位。对于路面现实状况无具体信息,无法帮助无人驾驶汽车定位、预测等功能实现辅助。更新周期长 更新周期短
高精度地图
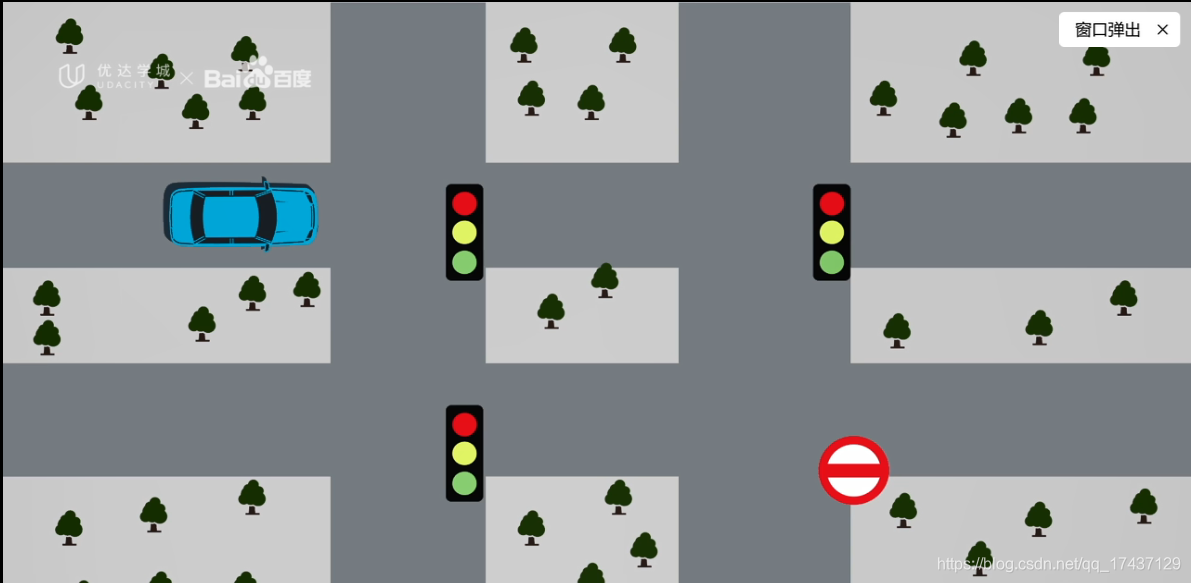
精度高,必须达到厘米级。内容丰富,诸如基本的红绿灯位置及其不同颜色的含义,限制速度多少和它的区域位置,更新周期短。
高精度地图辅助完成定位工作
类似于拼图,车辆会先寻找地表(运用各种传感器收集数据),再用地标与高精度地图上的特征进行匹配(预处理、坐标转换、数据融合),最终完成定位工作。这个定位取决于整个地图。

高精度地图辅助完成感知工作
无人驾驶车辆上的传感器具有感知距离有限、存在恶劣天气限制、障碍物后的物体难预测等问题。
这种情况下高精度地图可以提供车辆传感器中感知不到的道路信息,辅助车辆进行判断驾驶。地图的帮助可提前预测地标位置,另外还可以缩小传感器探测距离(规划出感兴趣区域ROI——提高精确度、减小计算资源)
高精度地图辅助完成规划工作
高精度地图可以帮助车辆找到合适的行车空间,还可以帮助规划器确定不同的路线选择,并帮助预测软件预测道路状况。
Apollp高精度地图
Apollo开发使用的高精度地图,包含了道路定义、交叉路口、交通信号、车道规则以及汽车导航的其他元素。高精度地图可在许多方面为无人驾驶车提供帮助,例如高精度地图会记录交通信号灯打的准确位置和高度,从而使感知难度大大降低。该地图不仅降低计算需求,还可以通过提供有关驾驶环境的详细信息,来确保无人驾驶车的安全。
高精度地图构建
构建过程:
1.数据采集(采用多种传感器)
2.数据处理(将多种传感器的接收数据融合,形成HD Map)
3.对象检测
4.手动验证(可确保自动地图创建过程正确进行,并发现问题)
5.地图发布
