Apollo感知之旅——传感器的选择和安装
传感器是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求,它是实现自动检测和自动控制的首要环节。
从智能驾驶发展趋势来看,企业应用于自动驾驶汽车的传感器主要有以下几种:图像传感器、激光雷达、毫米波雷达、超声波雷达以及生物传感器。它们依据各自不同的产品属性,在自动驾驶汽车行驶过程中各主不同的功能,以保证自动驾驶汽车的正常运行。
由于智能驾驶车辆只能实现部分场景的自动驾驶,为了能适应更多场景,一方面,可以配置性能更好或数量更多的环境感知传感器;另一方面,从降低整车成本考虑,还可以从传感器的布置优化方向入手,充分发挥传感器的性能。
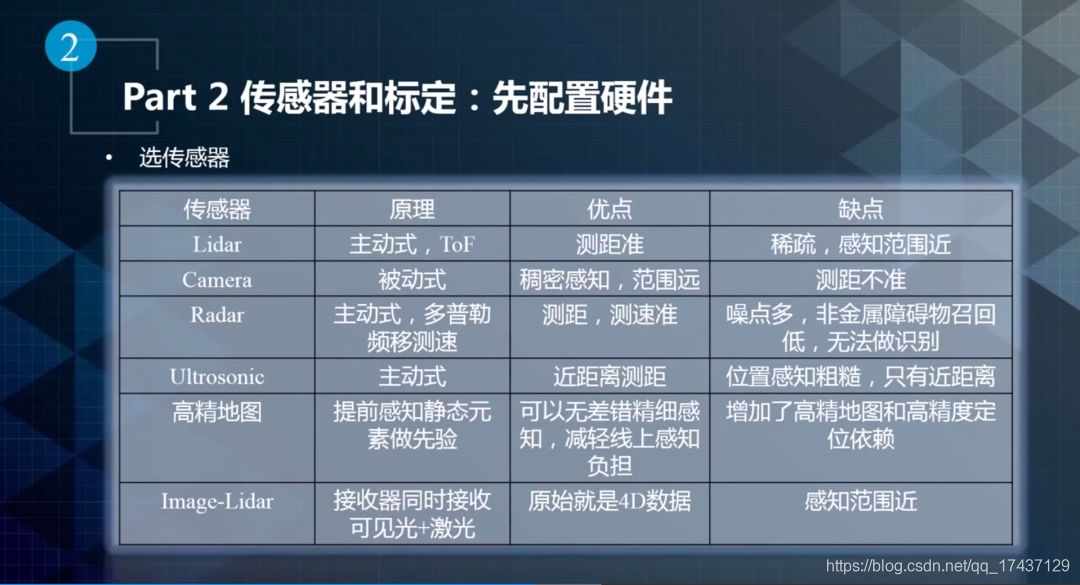
本节主要介绍无人车感知系统硬件的搭建,重点讲述传感器的选择和标定。目前,无人车中使用的传感器主要有激光雷达Lidar,相机和毫米波雷达Radar。
激光雷达
激光雷达的测距原理是激光头发射光束,打到障碍物上反射回来,到接收器接收到之反射信号的时间间隔乘以光速再除以二得到障碍物的距离,叫做TOF(Time of flight,飞行时间测距法)。
激光雷达传感器的好处在于自带光源不受外界干扰,白天晚上都可以,而且测距准确度高(厘米级的精度)。其缺点是多线激光雷达扫描还比较稀疏,尤其是当障碍物距离比较远的时候,因此,激光雷达目前并不适合做识别任务。
另外,激光雷达需要发射激光,功率限制其不能发射很远,发射太远反弹回来的信号就会很弱。目前,64线激光雷达的感知距离只有60~70米,对于高速行驶的无人车还不够。
相机
相机是最像人的一个传感器。它是被动式的,接受自然可见光的反射最后成像,受光照影响很大,白天的算法在晚上使用,开路灯和不开路灯的对感知结果影响很大,所以对算法研发挑战很大。它的优点是可以稠密感知,比如说现在的1080p图像,可以感知所有细节。
另外通过配置焦距,相机可以感知很远距离的物体,例如可以看到几百米外的物体。相机传感器的缺点是单目相机测距不准,无法做到激光雷达厘米级的测距精度。
Radar毫米波
毫米波雷达的原理和激光类似,只不过发射的是毫米波。由于它也是主动式感知设备,不太受天气、光照的影响。同时毫米波雷达还有多普勒频移效应可以测量与障碍物之间的相对速度。
其优点是测距、测速比较准,缺点是噪点很多,例如在空旷的地方反馈很多的回波,实际可能是路面的反馈信号而不是障碍物。其次它对于非金属的反射信号比较弱,召回比较低,例如在它面前走过行人有可能漏掉。最后毫米波雷达也是稀疏感知,无法做识别任务。

除了以上三种常见的传感器,还有一些用的相对少的传感方法,例如超声波,高精地图,Image-Lidar。
超声波的感知距离有限,对金属感知距离3米左右,对非金属只有1~2米。此外它的发射头是扇形的,扇形之外无法感知。
高精地图是先把静态元素储存好做成先验知识。它的优点是可以无差错的精确感知,减轻现场感知负担和依赖,其缺点是加重了整个系统对高精度地图和高精度定位的依赖。
Image-Lidar同时集结了激光和图像的好处,接收器同时对可见光、激光都有响应。
各种传感器的特性
安装传感器
传感器的安装对于后续步骤至关重用,需要科学、合理的安装。
首先需要对车辆建立,可以由厂家提供CAD模型,在真正安装之前,需要在软件环境里面放传感器,考虑以下因素对传感器的安装位置做出最合适的决定。第一是障碍物遮挡情况,这就是为什么很多无人驾驶车的传感器安装在车顶的原因。第二是方便传感器融合。传感器的融合需要不同传感器在视野上有重叠,否则很难进行传感器融合。传感器的安装还需要从整车的角度考虑,需要考虑安全,风阻,美观和清洗等因素。