
广西●河池学院
广西高校重点实验室培训基地
系统控制与信息处理重点实验室
本篇博客来自河池学院: 409教育机器人组
写作时间: 2020年8月8日
回顾上节课内容
前两节课主要运用了声音传感器,颜色传感器,陀螺仪,每个传感器都可以运用到实际中,让程小奔活灵活现,这节课来认识新的传感器“超声波传感器”,用它来实现一个避障的功能,这节课来学习《程小奔之避障》。
课程简介
本节课主要是应用程小奔的超声波传感器,程小奔通过超声波传感器来获取外界的障碍和距离,获取到获取外界的障碍和距离从而执行相应的程序,如程小奔遇到障碍,那么就显示难过的图案,再向后退20%动力0.5秒,再右转20%动力1秒,否则就显示开心图案,以20%动力向前进。
开始创作之旅
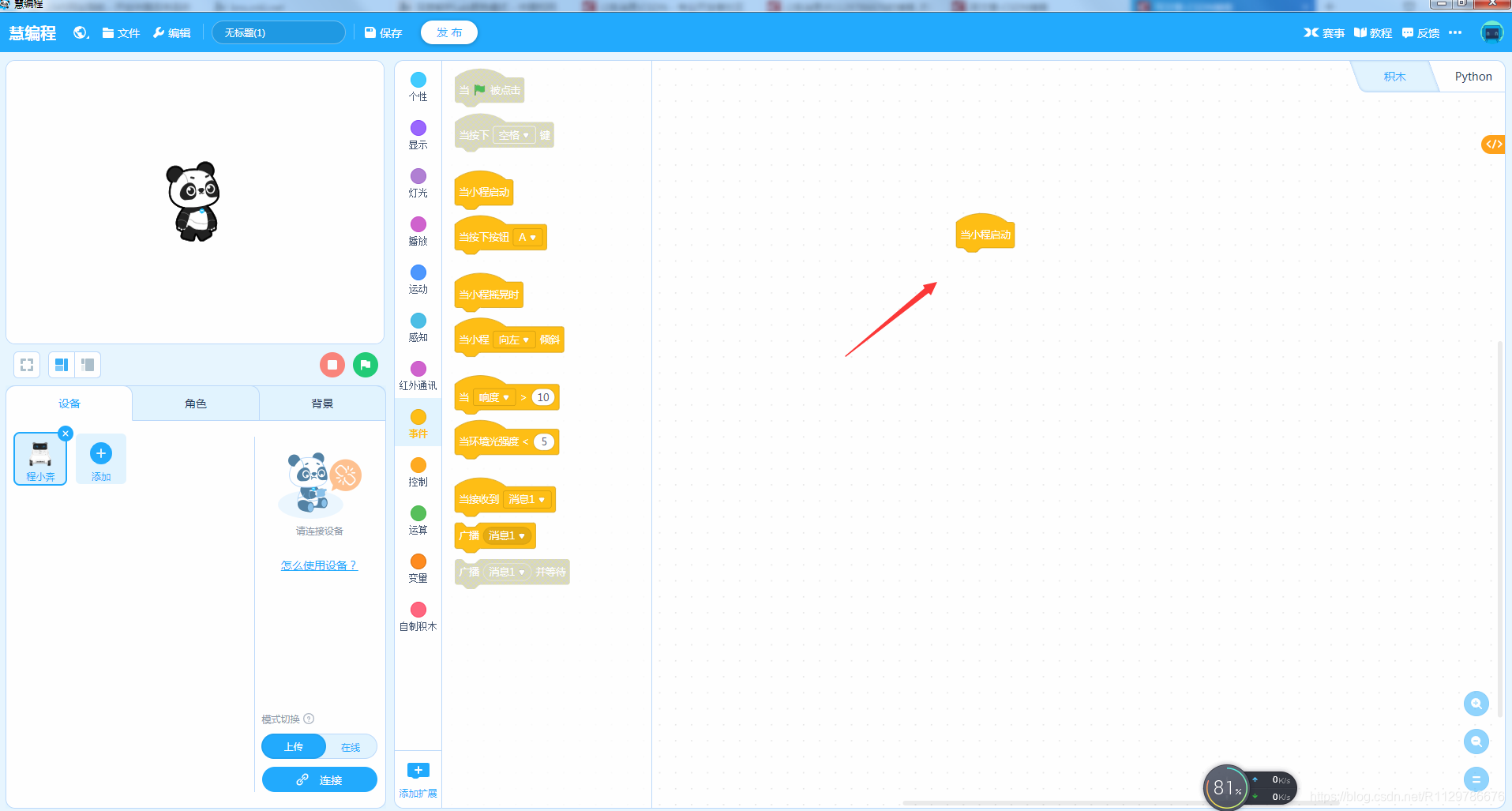
首先打开慧编程初始界面,将事件模块的"当小程启动"拖至脚本区,如下图
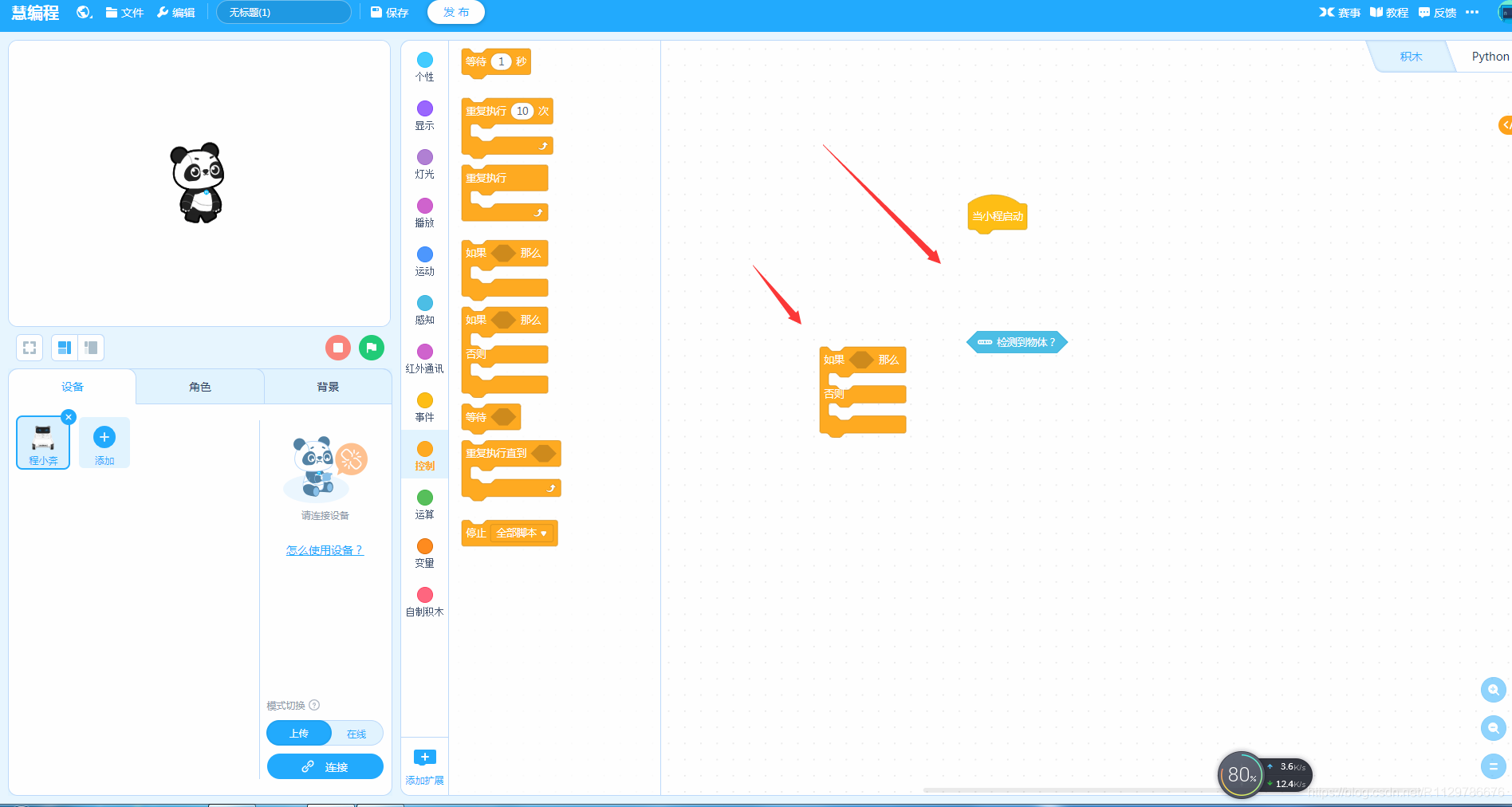
超声波传感器主要是程小奔检测障碍,从而进行判断前进还是后退右转,那么就要用到感知模块和控制模块,控制模块主要是对感知模块进行判断,那么我们需要将感知模块的“检测到物体?”和控制模块的“如果…那么…否则”拖至脚本区,如下图
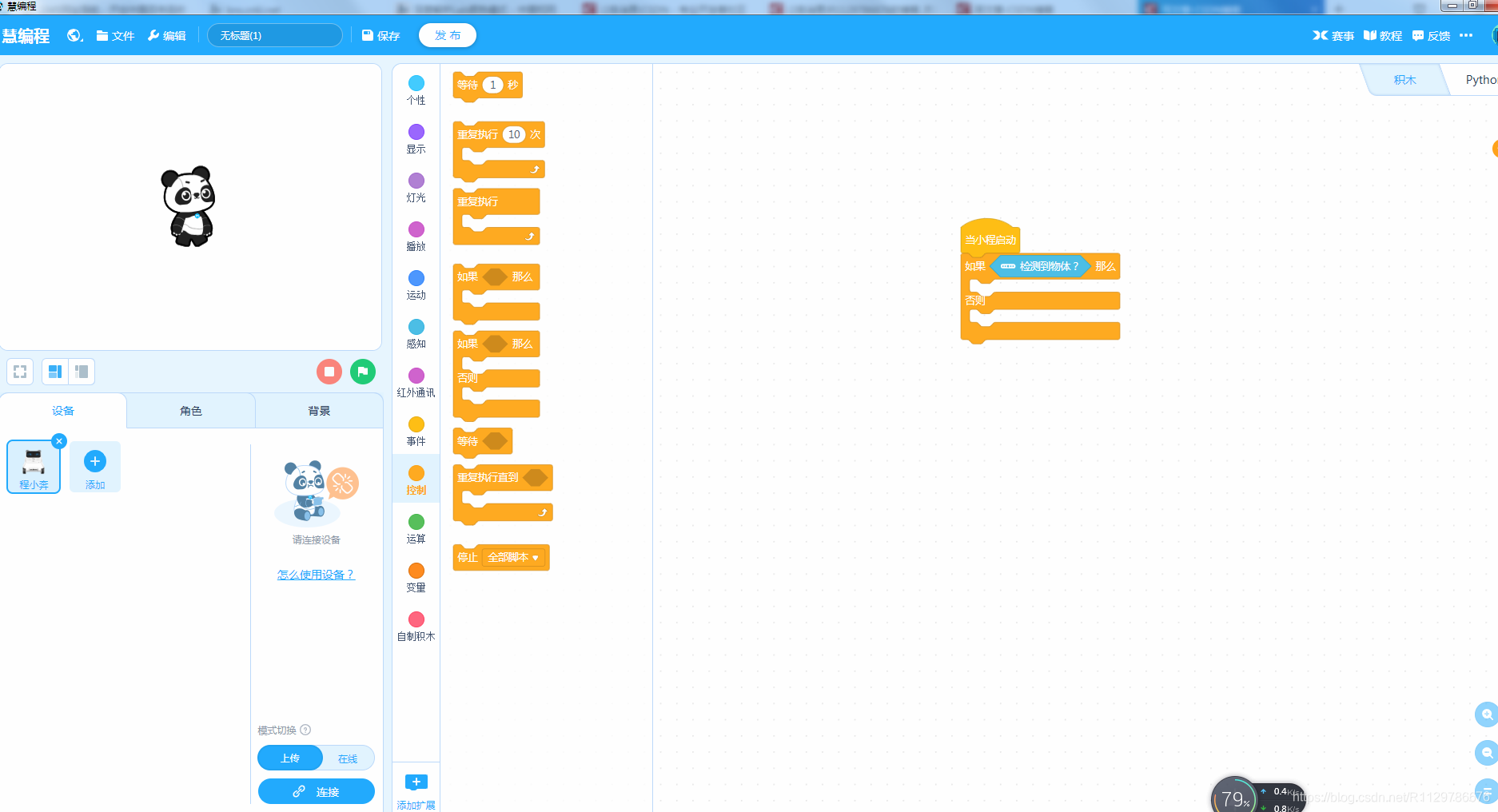
首先进行判断是否检测到障碍物再输出结果,检测不到障碍物,那么就输出结果,先将感知模块的“检测到障碍?”放置判断模块中,如下图
当程小奔检测到障碍物那么就显示难过的图案,再向后退20%动力0.5秒,再右转20%动力1秒,如下图
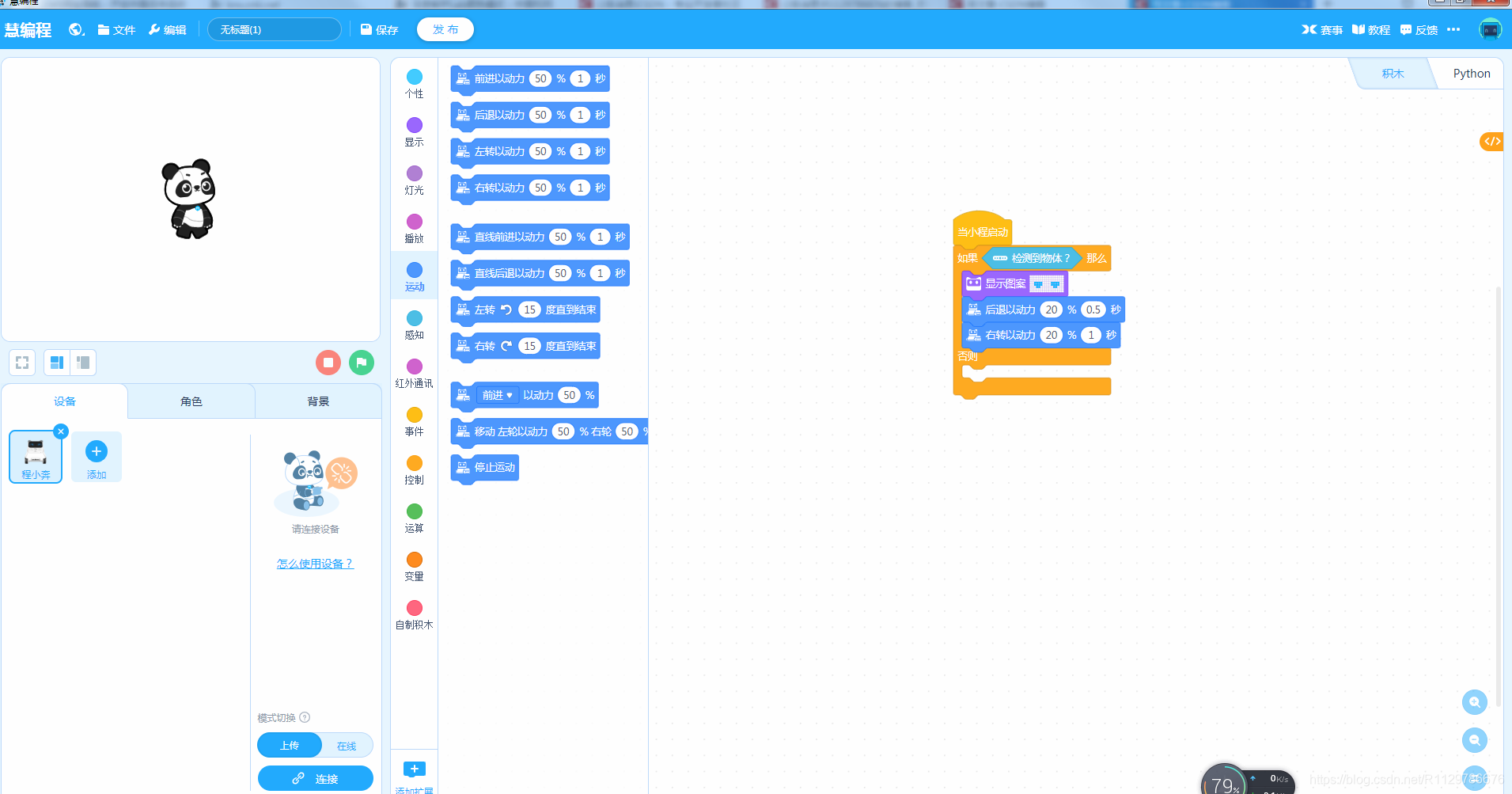
否则就显示开心图案,以20%动力向前进,如下图
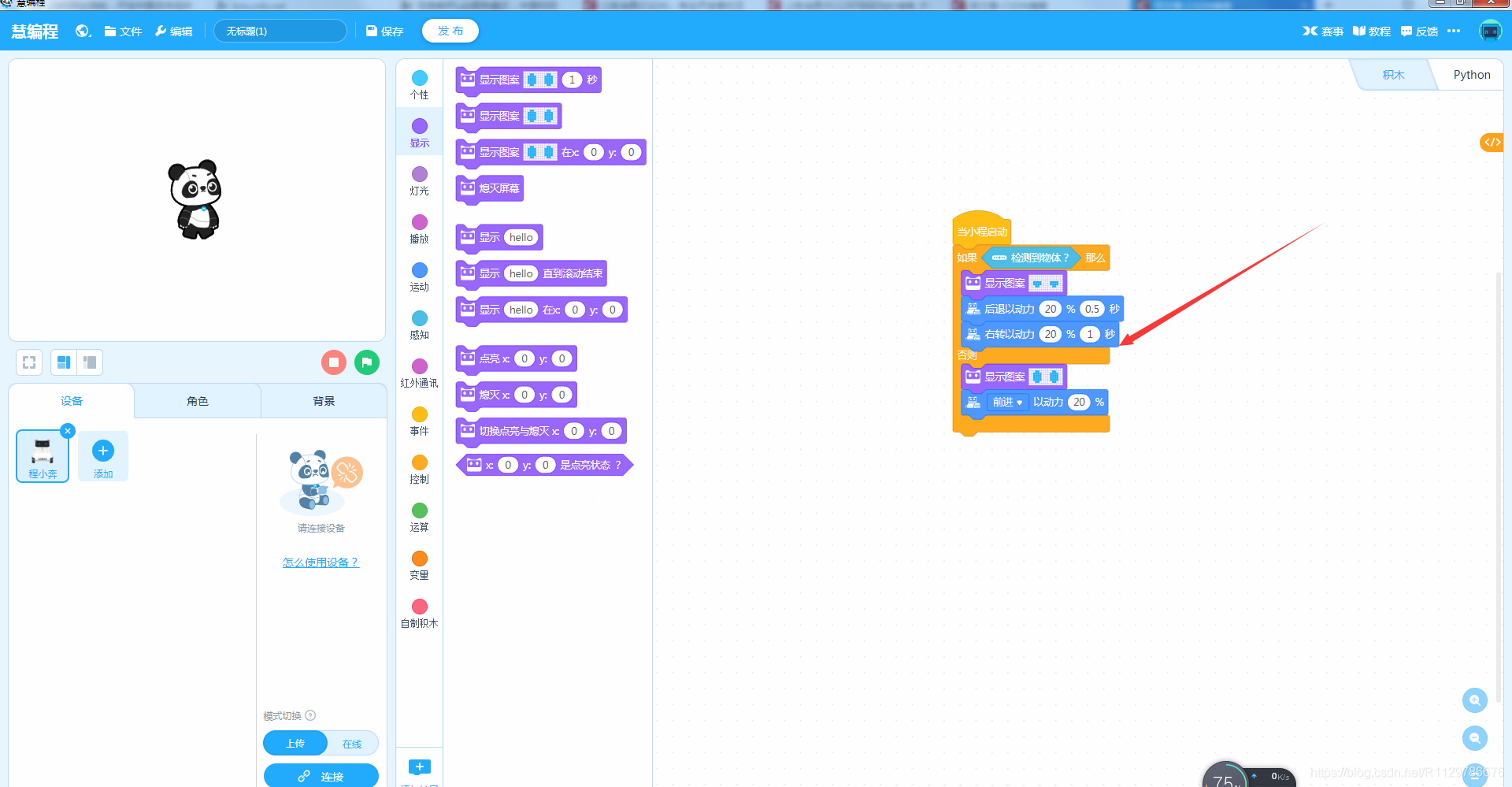
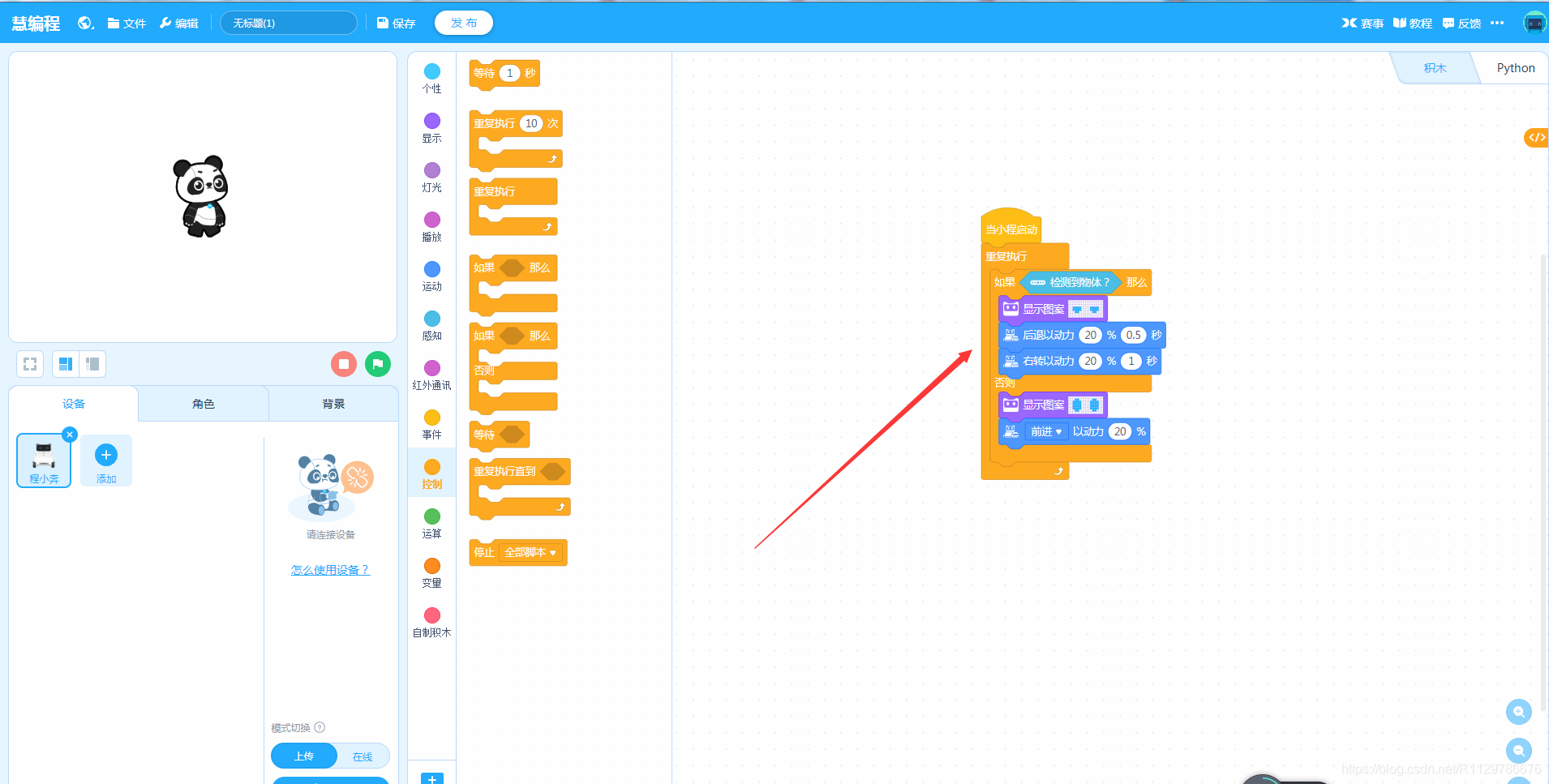
写程序的时候记得要检查,注意细节,程序中少了重复执行,如果没有重复执行程序只能执行一次,如下图
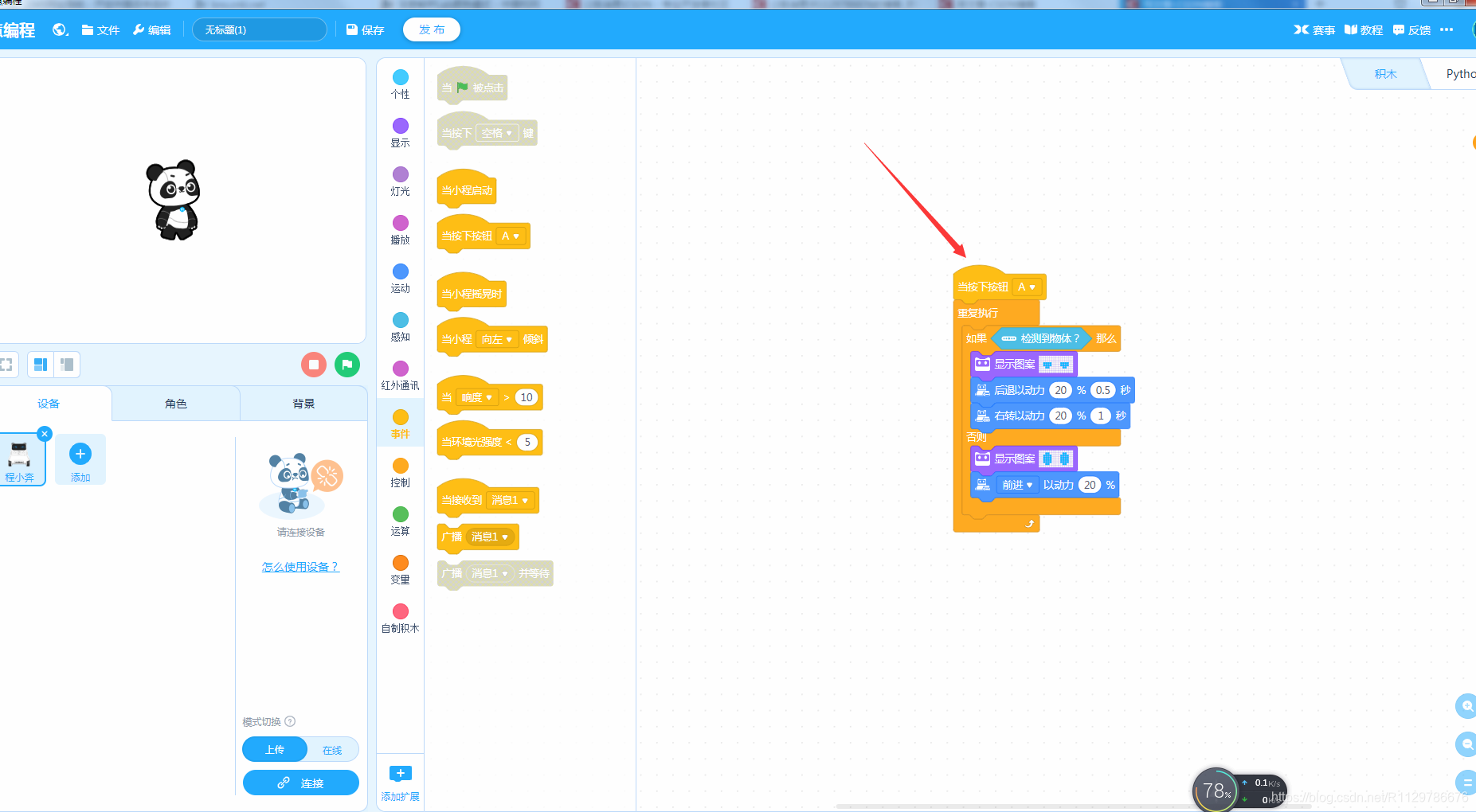
那么简简单单的避障程序就做好了啦,我们可以将程序优化一下,可以当按下A键时启动程序,这样就更加方便啦,不用上传程序到设备马上执行。如下图
最后将程小奔连接上,再上传设备,就可以验证程序啦。
创作效果
我们来看看创作效果如何,点击或复制下方链接即可。
http://m.v.qq.com/play.html?cid=&vid=l31315nkwmj&vuid24
总结
本节课主要运用超声波传感器,可以实现避障的功能,大家可以修改以上程序把程小奔“使唤”得更加完美,想怎么玩就怎么玩,每次记得将写好的程序进行保存,期待下节课精彩的内容。