ROS学习【18】-----利用Gazebo搭建赛道,控制小车完成比赛目录
现在很多小伙伴在为全国大学生智能车比赛做准备,但在进行小车组装之前,一定会通过ROS进行赛道模拟,调试,一切准备就绪后才会进行现实中小车的组装,因此,测试是非常重要的,本次博客,林君学长主要带大家利用Gazebo搭建全国大学生智能车比赛的规则赛道,控制小车,跑完赛道,虽然只是简单的模拟,但对参赛的小伙伴来说,可以说非常重要了,有了一个入门的基础,接下来,一起看步骤了解吧!
- ubuntu版本:ubuntuKylin-16.04
- ROS版本:ROS-kinetic
- Gazebo版本:Gazebo-7.16
一、 ROS仿真功能包下载编译
一下ROS的仿真功能包需要通过GitHub克隆下载,当然是网络的大佬写好了的,小伙伴如需要自己写,可以参考其中的代码,进行自行构建,这里,林君学长推荐模仿该仿真功能包,进行自行搭建,毕竟对于才参赛的同学来说,动手能力非常的重要!
1、racecar功能包下载
1)、新建终端进入ROS工作空间的src目录下
cd ~/lenovo/ros/src
2)、下载Gazebo搭建赛道功能包racecar
git clone https://github.com/xmy0916/racecar.git
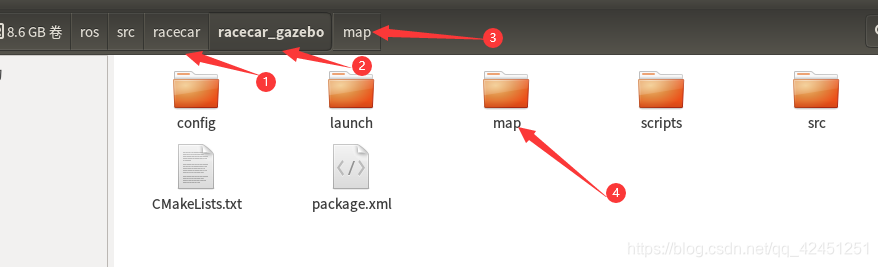
3)、racecar功能包中资源展示
4)、建议及推荐
(1)、小伙伴如果下载过慢,可以尝试通过手机开热点后,通过电脑进行连接,然后下载,这样可能会下载成功,因为林君学长就是这样下载成功的
(2)、小伙伴如果实在不能够下载,林君学长已经将该源码资源包啥贯穿到我的资源模块,小伙伴可以去林君学长的后台下载,下载链接如下所示:
https://download.csdn.net/download/qq_42451251/12483862

以上资源包的内容和林君学长下面讲解资源包的内容完全一样哦,接下来,让我们进入正题吧!
2、安装该功能包运行需要的控件
在上面的终端不关闭的情况下,新建一个终端,进行控件的安装,控件的安装是为了本次实验任务需要,不安装,在编译或者运行的时候会出现错误的哦!
1)、driver_base的控件安装
sudo apt-get install ros-kinetic-driver-base
输入y进行下载,以上截图为操作现状,后面的控件下载将不给出截图了哦,输入y对应下载就好!
2)、controllers控件安装
sudo apt-get install ros-kinetic-gazebo-ros-control
sudo apt-get install ros-kinetic-effort-controllers
sudo apt-get install ros-kinetic-joint-state-controller
3)、ackermann_msgs控件安装
sudo apt-get install ros-kinetic-ackermann-msgs
4)、planner控件安装
sudo apt-get install ros-kinetic-global-planner
sudo apt-get install ros-kinetic-teb-local-planner
以上就是需要编译之前准备的控件安装啦,控件安装成功后,关闭这个终端;有些控件是之前在进行ROS学习的时候安装过的,但也是本次任务需要的控件,小伙伴对应安装就好,如果安装过,他会提示已安装的哦。接下来,我们开始进行编译吧!
3、racecar功能包编译
1)、返回ROS工作空间
cd ~/lenovo/ros
2)、编译
catkin_make
3)、编译成功如下所示:
编译过程中,如果遇到问题,则可根据提示修改,由于林君学长在编译之后,没有遇到过问题,编译很流畅,如果小伙伴遇到问题,可以给林君学长留言或者私信,看到后,能够解决的会帮大家解决的哦!
4、测试是否编译成功
1)、程序注册
source ./devel/setup.bash
2)、在终端输入以下命令,运行小车模型,测试编译是否成功
roslaunch racecar_gazebo racecar.launch
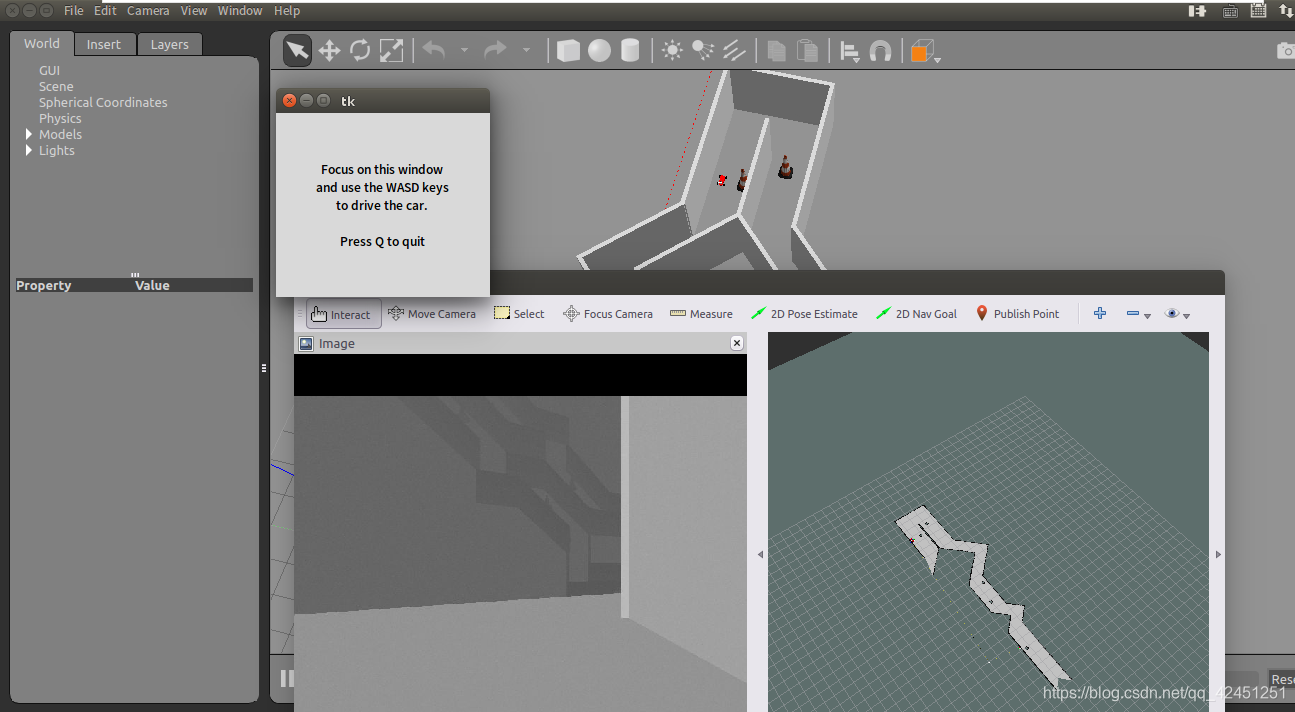
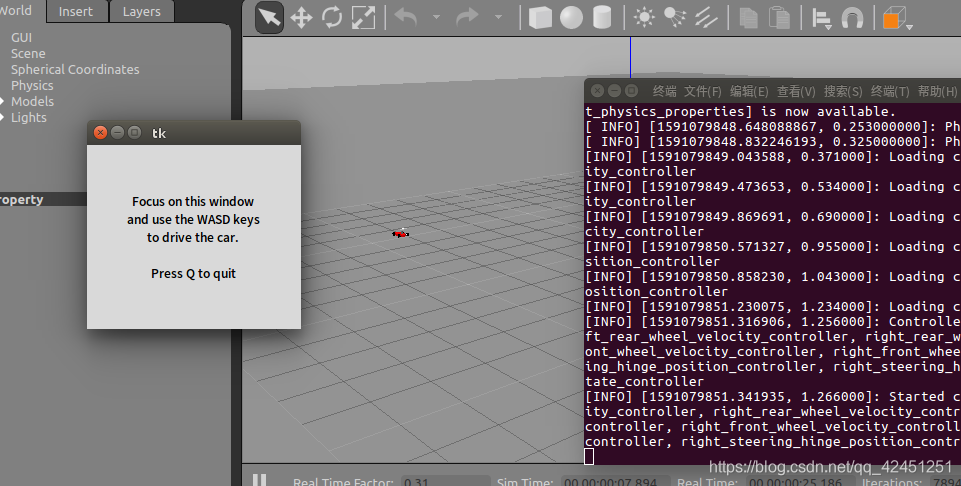
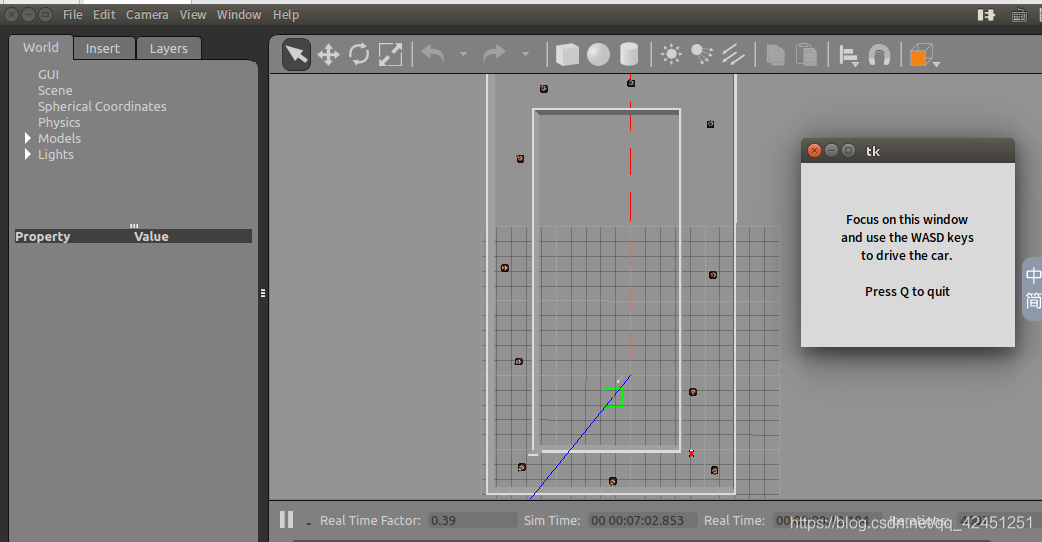
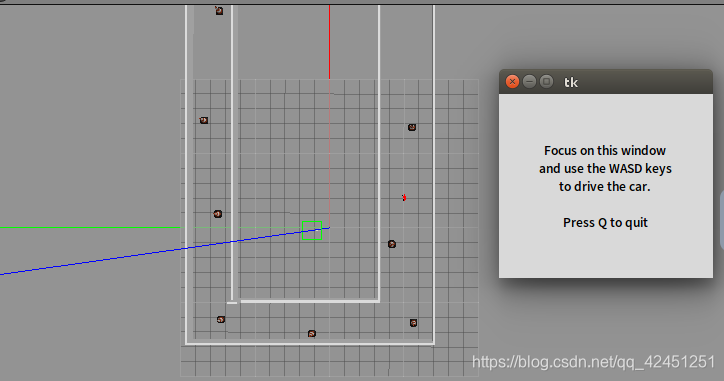
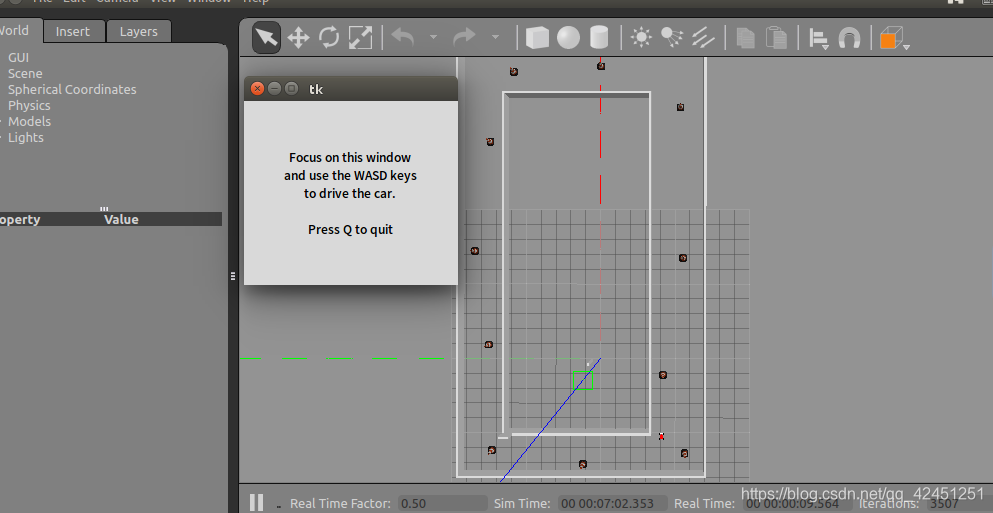
以上命令运行之后,系统将会打开一个tk的控制界面小窗,控制小车的移动,同时,系统会打开Gazebo仿真软件,里面会有一个小车模型,如下所示:
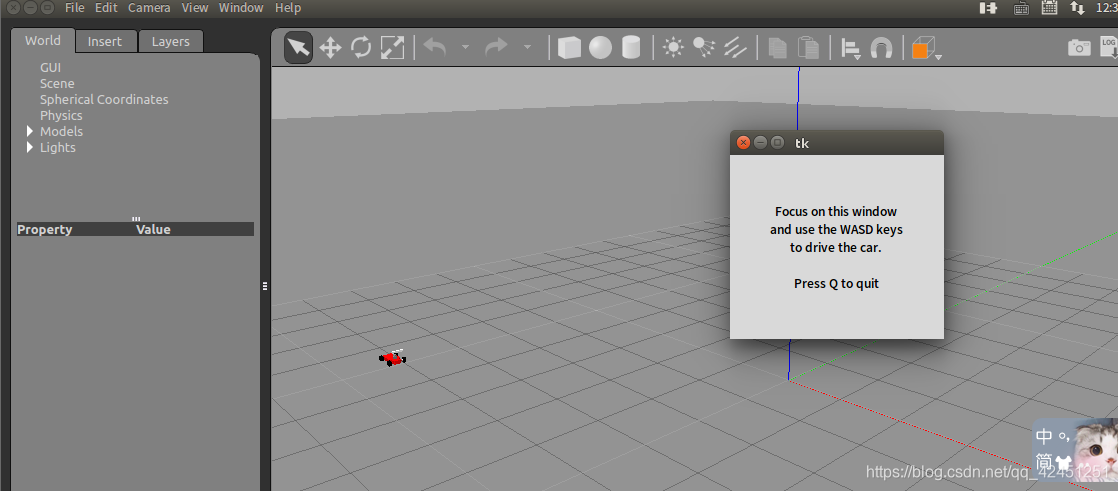
该tk窗口可以通过键盘的WSAD来控制小车进行位移!
二、 运行功能包自带的赛道
1、运行赛道,控制小车进行位移
1)、在上面ctrl+c结束gazebo的运行,然后运行如下命令,运行赛道
roslaunch racecar_gazebo racecar_runway.launch
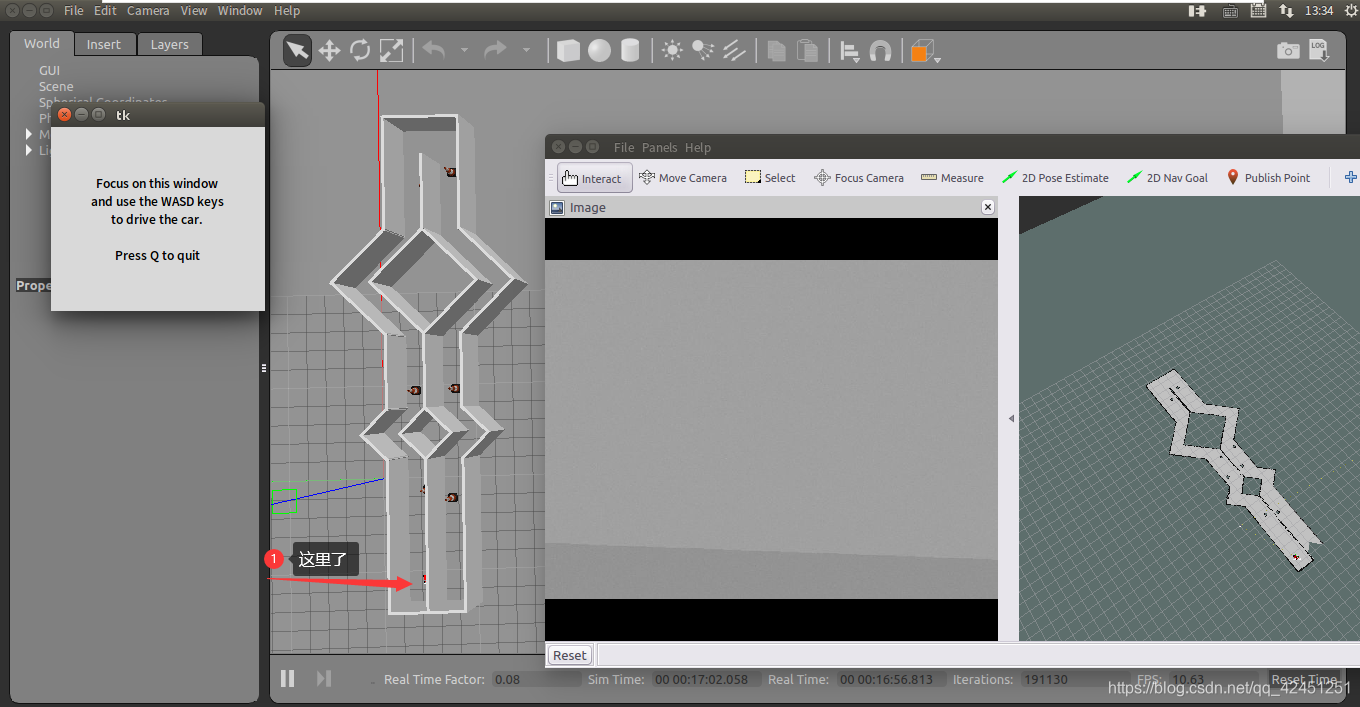
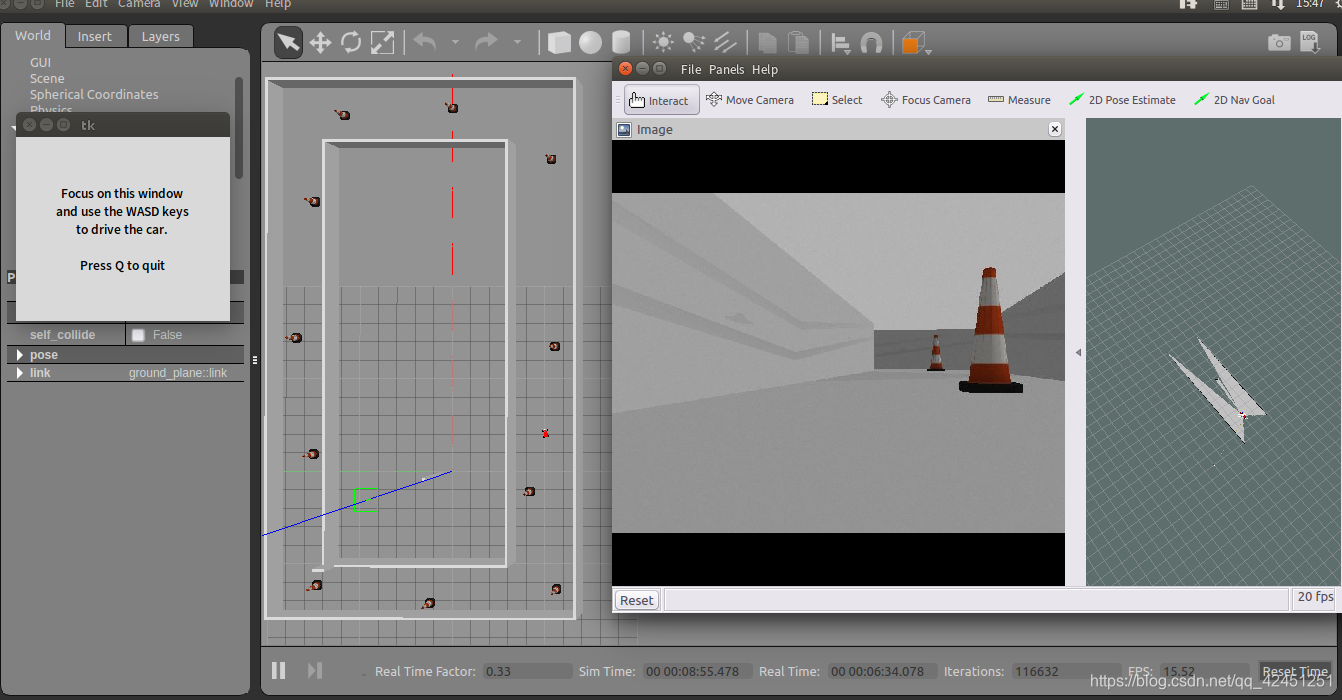
2)、运行结果如下:
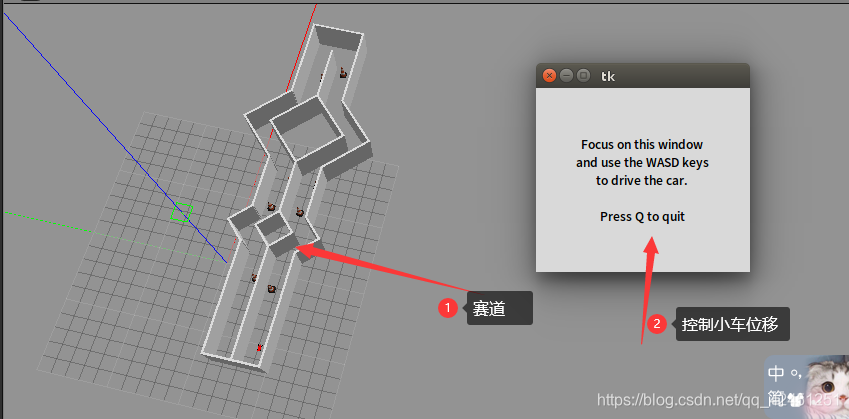
3)、控制小车进行位移:
2、进行gmapping建图
1)、新建终端,运行rviz,进行gmapping建图
cd ~/lenovo/ros
source ./devel/setup.bash
roslaunch racecar_gazebo slam_gmapping.launch
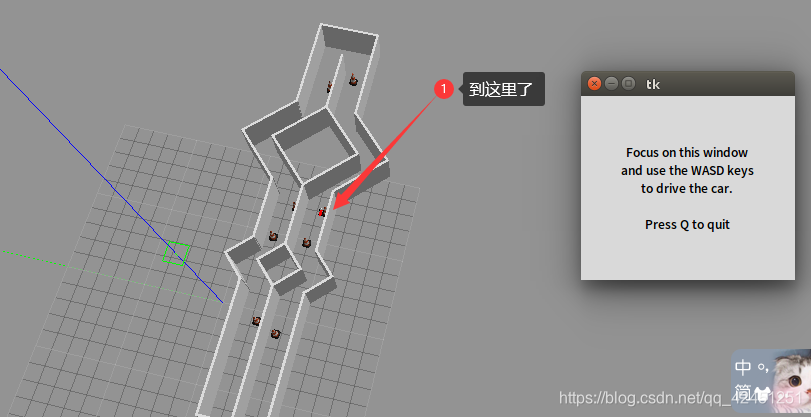
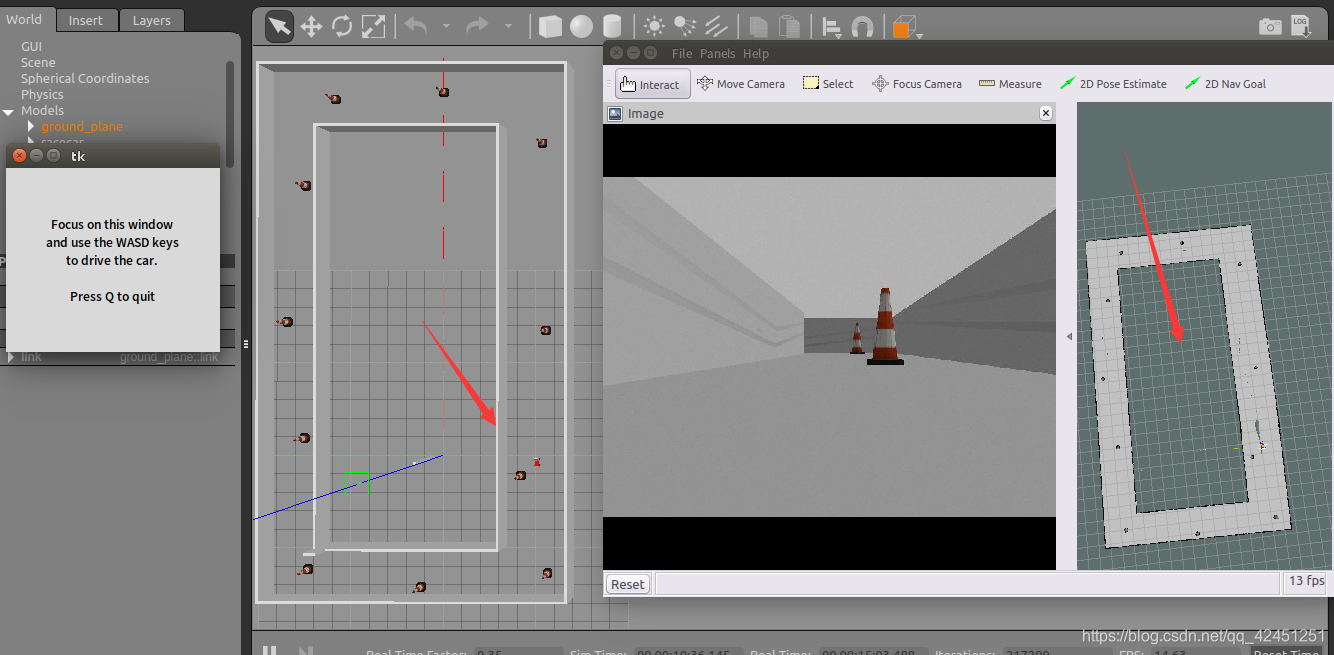
3)、控制小车跑完全图,进行gmapping建图
(1)、赛道跑到一半
(2)、赛道跑完
现在gmapping地图就建立好了,操控小车进行跑图需要有点耐心,需要一定的时间,而且操作不到位,可能导致小车翻车,所以小心操控呀!接下来就进行地图的保存吧
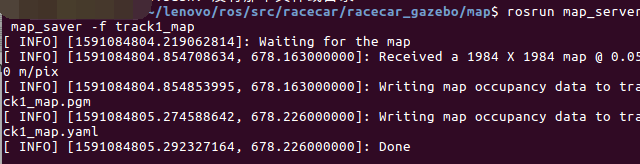
4)、通过以下命令,保存gmapping图
rosrun map_server map_saver -f test_map

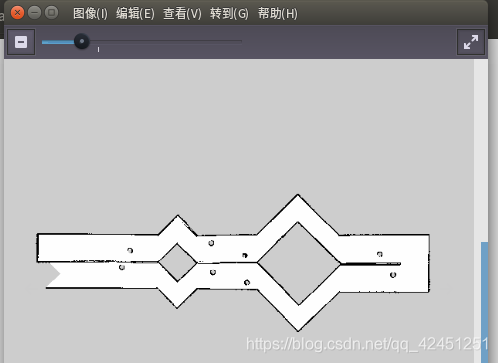
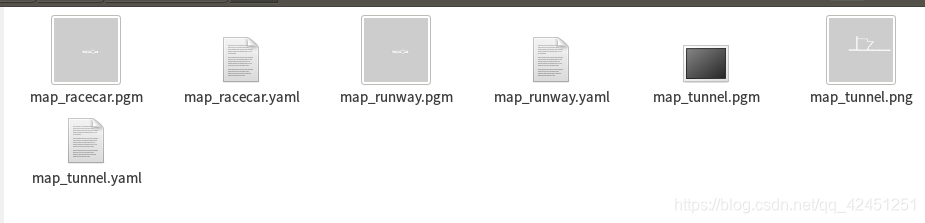
保存的地图如下所示:
注意: 由于我们是在ros下运行的,所以地图在ros工作空间下,小伙伴也可以自行定位地图保存的位置例如:
rosrun map_server map_saver -f xxx/xxx/test_map
一般来说,地图需要保存到map文件夹内,该文件夹专门用来保存我们创建模型的gmapping地图,如下所示:
好了,接下来,我们关闭上面运行的所有程序及所有终端,然后我们就可以开始进行我们自己搭建地图了。
接下来,我们自己搭建一个地图,然后添加障碍物进行小车跑图吧!
三、 自行进行赛道搭建
为了区别刚刚的地图,我们自行创建一个较为简单的地图吧,这也是为了方便本次博客的讲解,下面,我们开始吧!
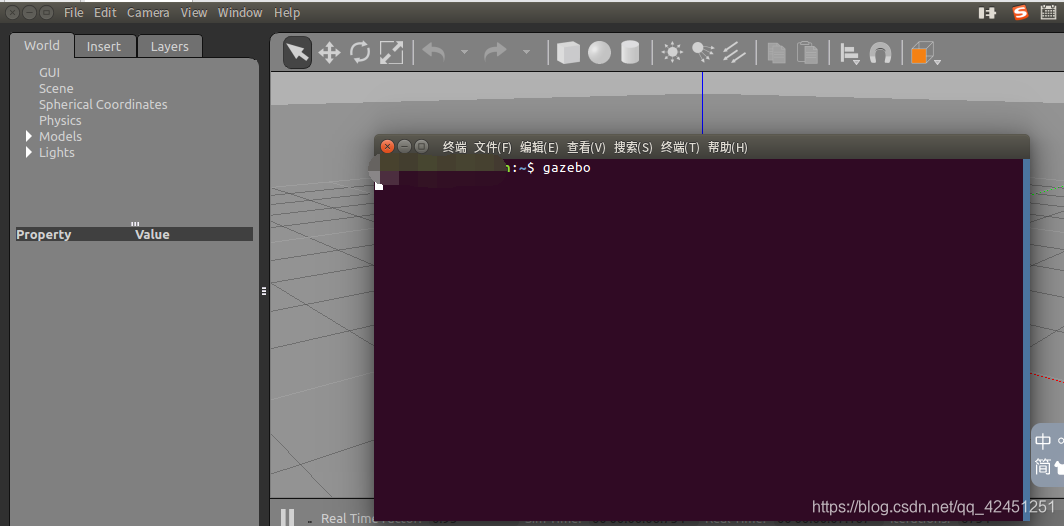
1、新建终端,打开Gazebo
1)、输入如下命令,打开gazebo
gazebo
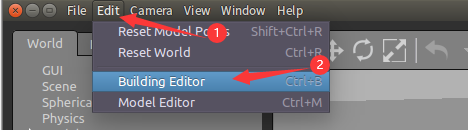
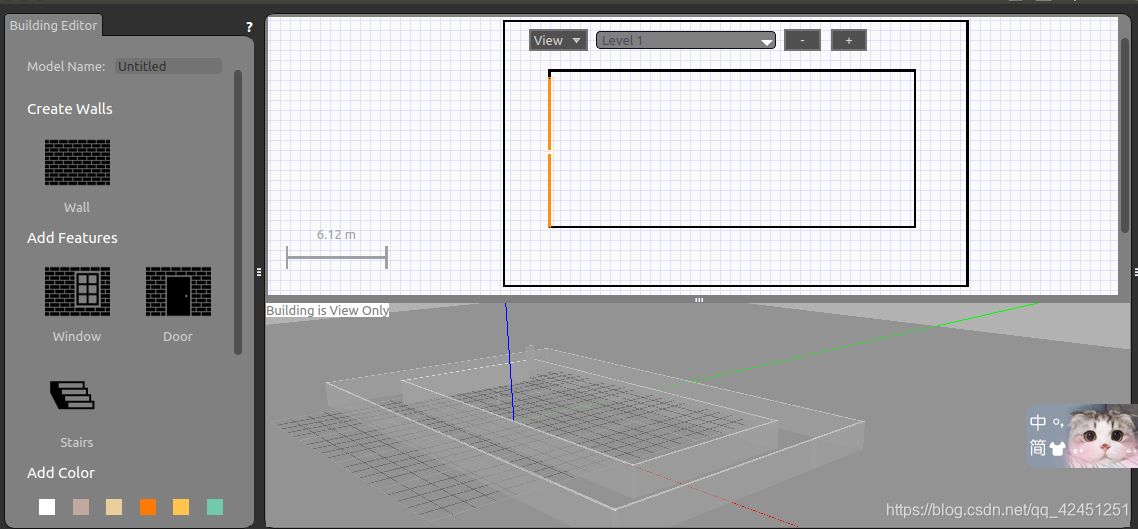
2)、点击Edit->Build Editor,进行模型创建
3)、模型创建完成图如下所示:
对于gazebo怎么创建模型图,小伙伴们可以参考林君学长的另一篇博客,讲解了如何通过gazebo创建仿真模型图及对应的保存,博客链接如下所示:
https://blog.csdn.net/qq_42451251/article/details/105161520
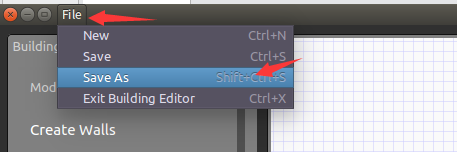
4)、接下来,将创建好的地图模型保存
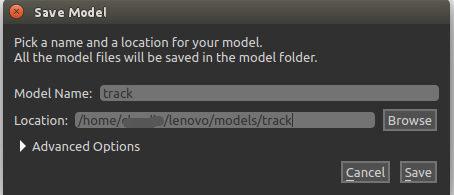
在对应的位置,我们便可以看到我们创建的赛道模型了:
5)、关闭gazebo
2、运行小车模型,导入刚刚的模型框架,然后保存world文件
1)、通过以下代码运行小车模型
cd ~/lenovo/ros
source ./devel/setup.bash
roslaunch racecar_gazebo racecar.launch
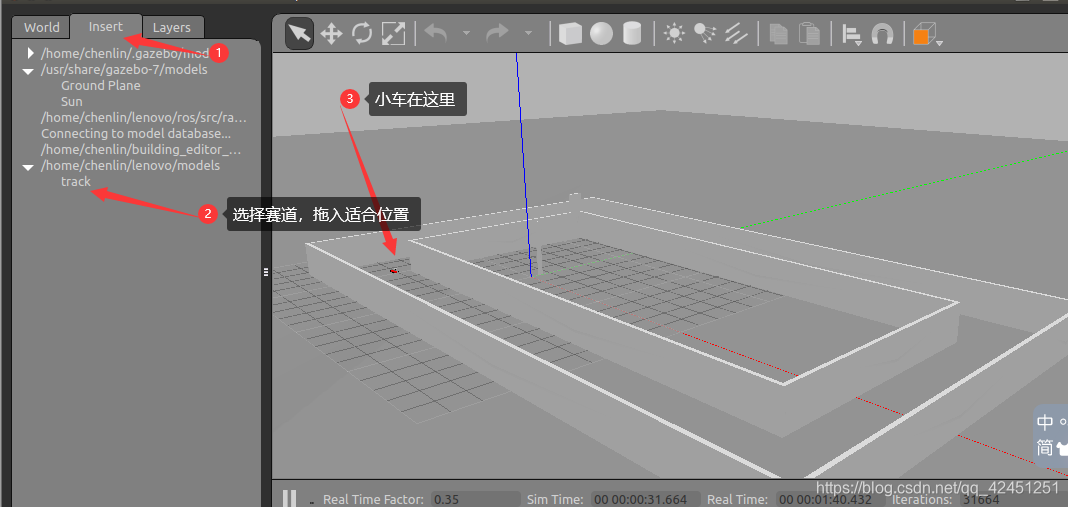
2)、拖入刚刚我们创建的地图到合适的位置
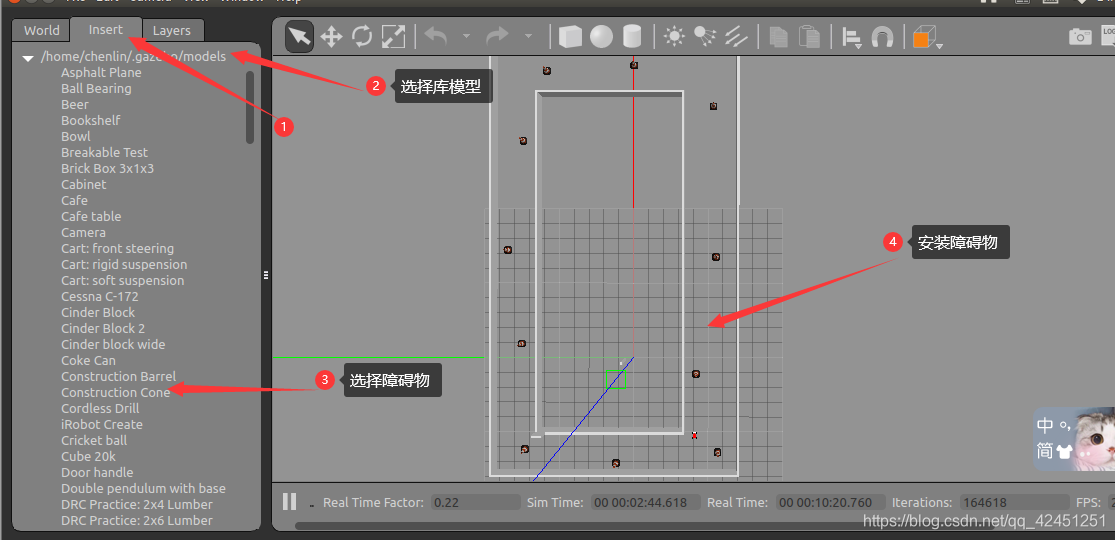
3)、添加障碍物
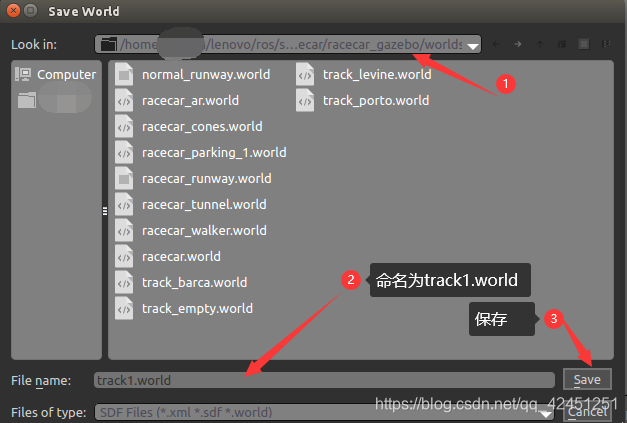
4)、保存world文件到下载功能包中的racecar_gazebo包中的worlds文件夹中
(1)、选择File->Save World AS
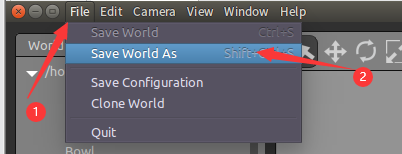
(2)、选择racecar_gazebo包中的worlds文件夹进行保存,自己命名吧,不要和里面的名字重复就好,学长命名为track1
(3)、查看是够保存成功
可以看到模型导入成功,接下来,我们就创建launch文件运行自己的地图吧!
3、创建launch文件,填写赛道配置参数
1)、新建终端,进入racecar_gazebo工程包中的launch文件夹
cd ~/lenovo/ros/src/racecar/racecar_gazebo/launch
2)、创建track1.launch文件
touch track1.launch
3)、打开track1.launch文件,写入配置参数
gedit track1.launch
写入如下代码:
<?xml version="1.0"?>
<launch>
<!-- Launch the racecar -->
<include file="$(find racecar_gazebo)/launch/racecar.launch">
<arg name="world_name" value="track1"/>
</include>
</launch>
然后点击保存后关闭!接下来就可以运行我们自己的赛道了
4、运行我们的地图
1)、运行地图
source ./devel/setup.bash
roslaunch racecar_gazebo track1.launch
2)、控制小车跑图
5、进行gmapping建图
1)、上面运行的终端不关闭,新建终端,接着输入如下命令,进行gmapping建图
roslaunch racecar_gazebo slam_gmapping.launch
2)、控制小车,跑完全图,全图如下所示:
3)、新建终端,保存gmapping创建的地图
cd ~/lenovo/ros/src/racecar/racecar_gazebo/map
rosrun map_server map_saver -f track1_map
4)查看地图是否保存成功
可以看到,地图已经完整的保存了哦;到这里,我们的基本任务就完成了哦,关闭以上运行的所有软件,及所有终端;接下来,我们就让小车自动导航吧,避免人工操作过于繁琐,让它自己跑起来!
四、 实现 小车自主定位导航
1、创建手工导航launch文件
1)、新建终端,创建track2.launch文件
cd ~/lenovo/ros/src/racecar/racecar_gazebo/launch
touch track2.launch
gedit track2.launch
2)、写入配置文件代码
<?xml version="1.0"?>
<launch>
<!-- Launch the racecar -->
<include file="$(find racecar_gazebo)/launch/racecar.launch">
<arg name="world_name" value="track1"/>
</include>
<!-- Launch the built-map -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find racecar_gazebo)/map/track1_map.yaml" />
<!--Launch the move base with time elastic band-->
<param name="/use_sim_time" value="true"/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find racecar_gazebo)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find racecar_gazebo)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find racecar_gazebo)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find racecar_gazebo)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find racecar_gazebo)/config/teb_local_planner_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="planner_frequency" value="0.01" />
<param name="planner_patience" value="5.0" />
<!--param name="use_dijkstra" value="false" /-->
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" />
<param name="controller_frequency" value="5.0" />
<param name="controller_patience" value="15.0" />
<param name="clearing_rotation_allowed" value="false" />
</node>
</launch>
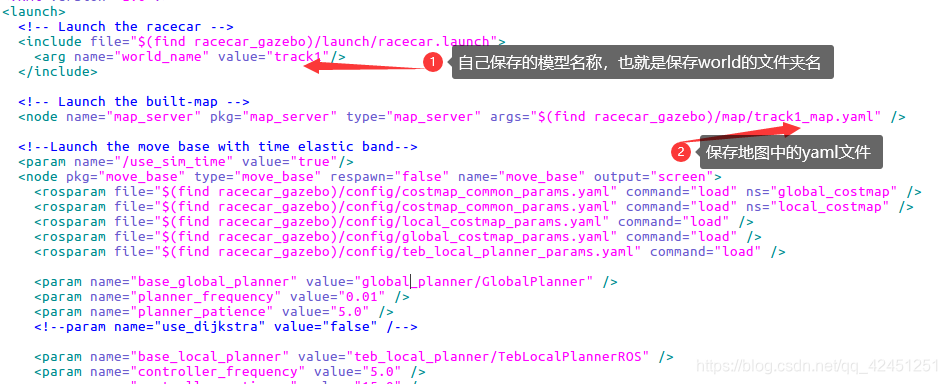
3)、如何改为你们的?
小伙伴只需要如下图所示,该其中两个地方,改为你们自己的模型名和保存地图的yaml文件就可以了:
2、运行手工导航
1)、输入如下命令,运行我们的赛道
cd ~/lenovo/ros
source ./devel/setup.bash
roslaunch racecar_gazebo track2.launch
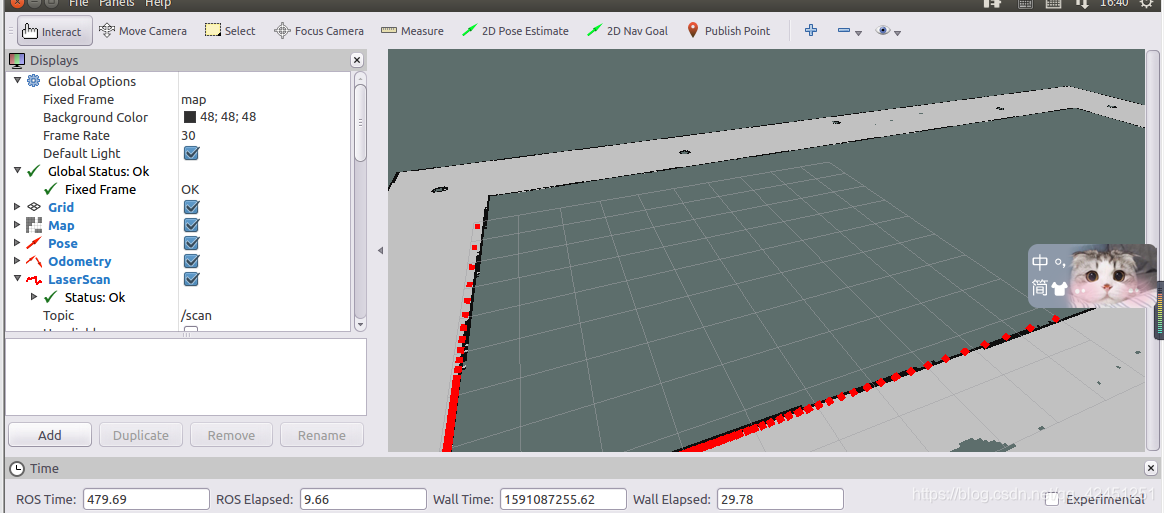
2)、新建终端,运行RVIZ进行手工导航
cd ~/lenovo/ros
source ./devel/setup.bash
roslaunch racecar_gazebo racecar_rviz.launch
3)、新建终端,启动导航的path_pursuit.py文件
cd ~/lenovo/ros
source ./devel/setup.bash
rosrun racecar_gazebo path_pursuit.py
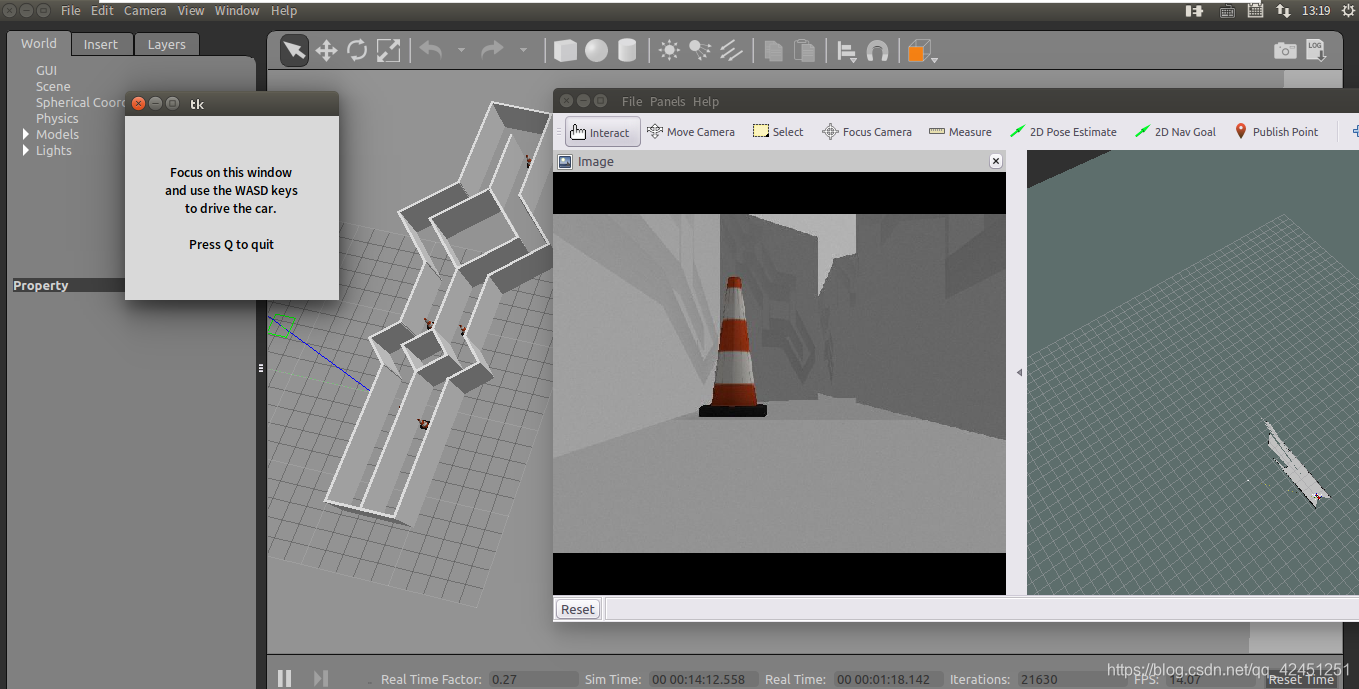
3、选择2D Nav Goal指针,进行手工导航
1)、选择2D Nav Goal指针
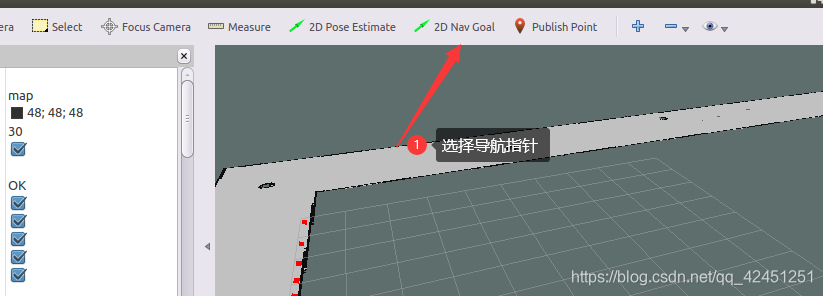
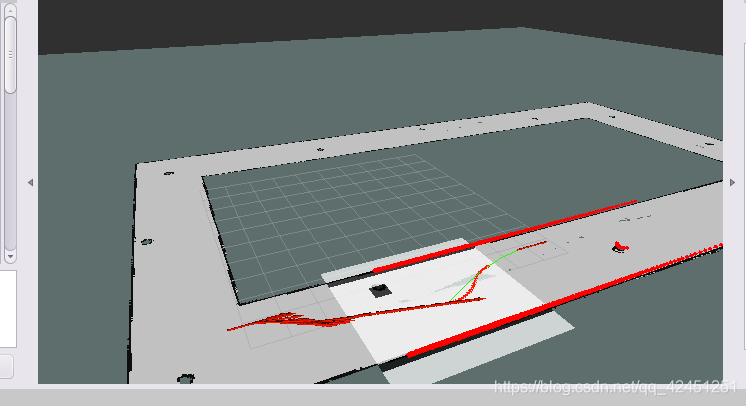
2)、通过2D Nav Goal指针选择地图上面的一个点进行手工导航
3)、新建终端,运行路径python文件,提示是否到达终点
cd ~/lenovo/ros
source ./devel/setup.bash
rosrun racecar_gazebo path_pursuit.py
4)、观察小车的移动情况
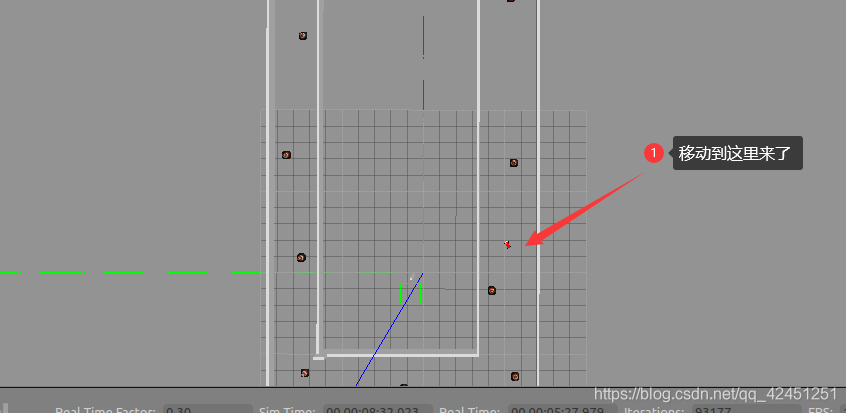
到达终点之后,运行路径python文件的终端就会显示已到达:

小车自动导航很慢的,小伙伴耐心等待就行了!
以上就是本次博客的全部内容啦,希望小伙伴通过对本次博客的阅读,可以帮助小伙伴理解,如何进行赛道搭建并进行小车吧比赛建模,对小伙伴参加全国智能车大赛是非常有帮助的哦!
遇到问题的小伙伴评论区留言,林君学长看到会为大家解答的,这个学长不太冷!
陈一月的又一天编程随岁月^ _ ^