#include <string>
#include <opencv2/core/core.hpp>
#include "Tracking.h"
#include "FrameDrawer.h"
#include "MapDrawer.h"
#include "Map.h"
#include "LocalMapping.h"
#include "LoopClosing.h"
#include "KeyFrameDatabase.h"
#include "ORBVocabulary.h"
#include "Viewer.h"
#include "System.h"
#include "Converter.h"
#include <thread>
#include <pangolin/pangolin.h>
#include <iomanip>
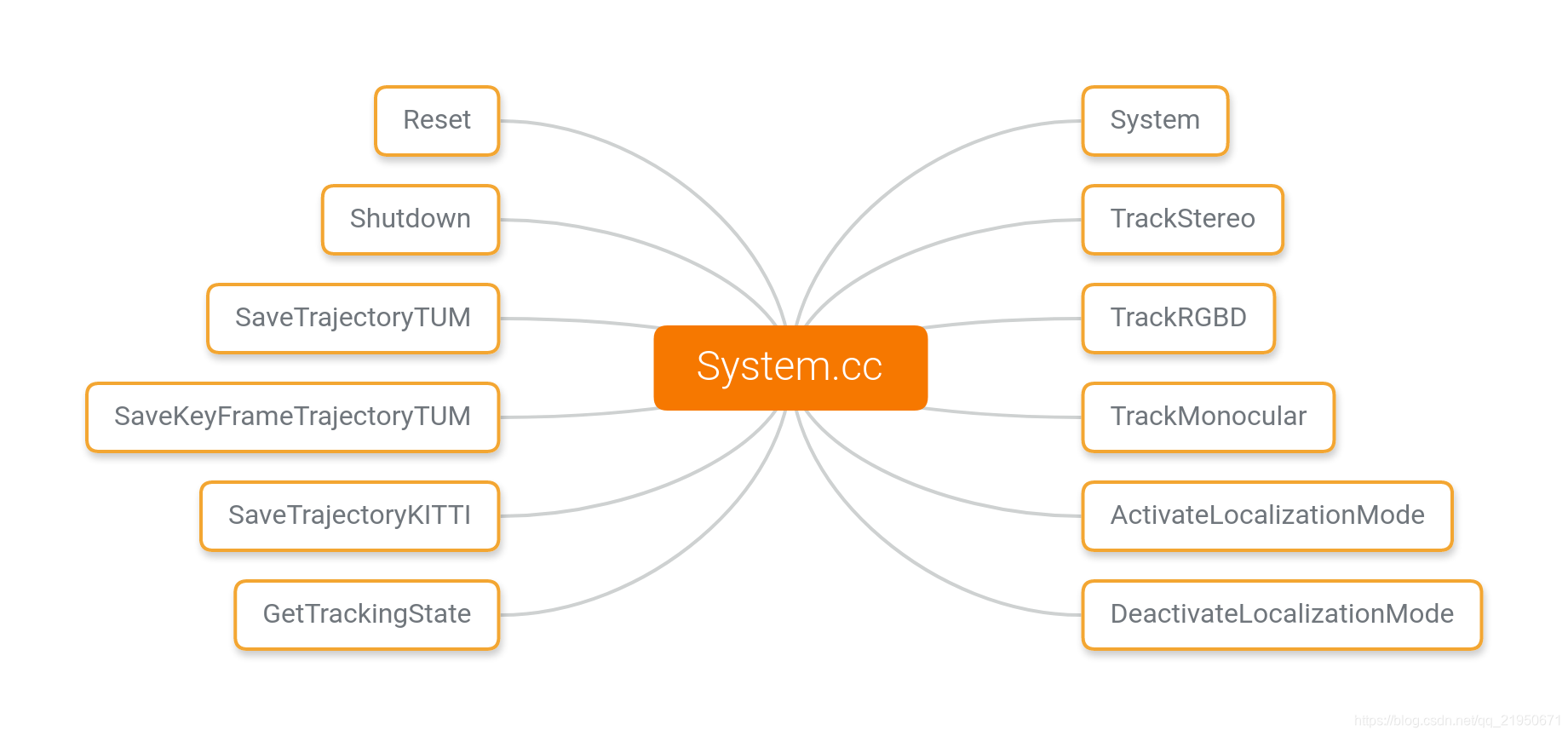
/**
* ORB-SLAM2系统主线程结构,各模块由这里开始被调用
*/
namespace ORB_SLAM2{
/**
* const string &strVocFile, 指定ORB字典文件的路径
* const string &strSettingsFile, 指定配置文件的路径
* const eSensor sensor, 指定配置文件的路径
* const bool bUseViewer, 指定是否使用可视化界面
* 创建可视化指针用Pangolin显示地图,相机位姿 Viewer* mpViewer
* mSensor(sensor), 初始化传感器类型
* 枚举类型 本系统所使用的传感器类型
* enum eSensor{
* MONOCULAR=0,
* STEREO=1,
* RGBD=2};
*
* mbReset(false), 复位标志
* mbActivateLocalizationMode(false),定位建图模式 记录模式的变量
* mbDeactivateLocalizationMode(false),定位模式 记录模式的变量
*
* 类变量前缀 m
* 指针类型变量前缀 p
* 进程前缀 t
* Initialize the SLAM system. It launches the Local Mapping, Loop Closing and Viewer threads.
*/
System::System(
const string &strVocFile,
const string &strSettingsFile,
const eSensor sensor,
const bool bUseViewer):
mSensor(sensor),
mpViewer(static_cast<Viewer*>(NULL)),
mbReset(false),
mbActivateLocalizationMode(false),
mbDeactivateLocalizationMode(false)
{
cout << "Input sensor was set to: "; //输出当前传感器类型
if(mSensor==MONOCULAR)
cout << "Monocular" << endl;
else if(mSensor==STEREO)
cout << "Stereo" << endl;
else if(mSensor==RGBD)
cout << "RGB-D" << endl;
// Check settings file 如果打开失败,输出调试信息
cv::FileStorage fsSettings(strSettingsFile.c_str(),cv::FileStorage::READ);
if(!fsSettings.isOpened()){
cerr << "Failed to open settings file at: " << strSettingsFile << endl;
exit(-1);
}
/**
* Load ORB Vocabulary
* ORB vocabulary used for place recognition and feature matching.
* 建立一个新的ORB字典 typedef DBoW2::TemplatedVocabulary<DBoW2::FORB::TDescriptor, DBoW2::FORB> ORBVocabulary;
* 定义存储ORB字典的指针 ORBVocabulary* mpVocabulary;
*/
cout << endl << "Loading ORB Vocabulary. This could take a while..." << endl;
mpVocabulary = new ORBVocabulary();
bool bVocLoad = mpVocabulary->loadFromTextFile(strVocFile); //获取字典加载状态
if(!bVocLoad){//如果加载失败 输出调试信息 然后退出
cerr << "Wrong path to vocabulary. " << endl;
cerr << "Falied to open at: " << strVocFile << endl;
exit(-1);
}
cout << "Vocabulary loaded!" << endl << endl;// 加载成功
/**
* Create KeyFrame Database
* KeyFrame database for place recognition (relocalization and loop detection).
* 定义存储关键帧数据库的指针,用于重定位和回环检测 KeyFrameDatabase* mpKeyFrameDatabase;
* 构造函数, KeyFrameDatabase::KeyFrameDatabase (const ORBVocabulary &voc):
*/
mpKeyFrameDatabase = new KeyFrameDatabase(*mpVocabulary);
/**
* Create the Map Map structure that stores the pointers to all KeyFrames and MapPoints.
* 定义存储地图的指针,地图包括关键帧和地图点
* 地图构造函数 Map* mpMap; Map::Map():mnMaxKFid(0)
*/
mpMap = new Map();
/**
* Create Drawers. These are used by the Viewer 这里的帧绘制器和地图绘制器将会被可视化的Viewer所使用
* FrameDrawer* mpFrameDrawer; 创建帧显示对象指针
* FrameDrawer::FrameDrawer(Map* pMap):mpMap(pMap) 初始化构造函数
*/
mpFrameDrawer = new FrameDrawer(mpMap);
/**
* MapDrawer* mpMapDrawer; 创建地图显示对象指针
* MapDrawer::MapDrawer(Map* pMap, const string &strSettingPath):mpMap(pMap) 初始化构造函数
*/
mpMapDrawer = new MapDrawer(mpMap, strSettingsFile);
/**
* Tracker. It receives a frame and computes the associated camera pose.
* It also decides when to insert a new keyframe, create some new MapPoints and performs(执行) relocalization if tracking fails.
* 跟踪接收帧和帧的位姿,负责创建关键帧,新地图点,跟踪失败后的重定位.
* Initialize the Tracking thread (it will live in the main thread of execution, the one that called this constructor)
* 在主线程中初始化跟踪线程
* Tracking* mpTracker;
*
* mpVocabulary, // 字典
* mpFrameDrawer, // 帧可视化
* mpMapDrawer, // 地图可视化
* mpMap, // 地图
* mpKeyFrameDatabase, // 关键帧地图
* strSettingsFile, // 参数配置文件路径
* mSensor); // 传感器类型
*/
mpTracker = new Tracking(this,
mpVocabulary,
mpFrameDrawer,
mpMapDrawer,
mpMap,
mpKeyFrameDatabase,
strSettingsFile,
mSensor);
/**
* Local Mapper. It manages the local map and performs local bundle adjustment. 创建局部建图对象指针 管理局部地图并进行局部BA
* Initialize the Local Mapping thread and launch 初始化局部建图线程并运行
* LocalMapping* mpLocalMapper;
* LocalMapping::LocalMapping(Map *pMap, const float bMonocular): 初始化构造函数
*
* System threads: Local Mapping, Loop Closing, Viewer. 系统在运行主进程跟踪的同时创建局部建图,回环检测,可视化线程
* The Tracking thread "lives" in the main execution thread that creates the System object.
* std::thread* mptLocalMapping;
* std::thread* mptLoopClosing;
* std::thread* mptViewer;
*/
mpLocalMapper = new LocalMapping(mpMap,mSensor==MONOCULAR);
mptLocalMapping = new thread(&ORB_SLAM2::LocalMapping::Run,mpLocalMapper);
/**
* Loop Closer. It searches loops with every new keyframe.
* If there is a loop it performs a pose graph optimization and full bundle adjustment (in a new thread) afterwards.
* 创建回环检测指针,搜索回环执行位姿图优化并且开启新线程进行全局BA
* Initialize the Loop Closing thread and launchiomanip
* LoopClosing* mpLoopCloser;
* LoopClosing::LoopClosing(Map *pMap, KeyFrameDatabase *pDB, ORBVocabulary *pVoc, const bool bFixScale): 初始化构造函数
*
* System threads: Local Mapping, Loop Closing, Viewer. 系统在运行主进程跟踪的同时创建局部建图线程,回环检测线程,可视化线程
* The Tracking thread "lives" in the main execution thread that creates the System object.
* std::thread* mptLocalMapping;
* std::thread* mptLoopClosing;
* std::thread* mptViewer;
*/
mpLoopCloser = new LoopClosing(mpMap,mpKeyFrameDatabase,mpVocabulary,mSensor!=MONOCULAR);
mptLoopClosing = new thread(&ORB_SLAM2::LoopClosing::Run,mpLoopCloser);
// Initialize the Viewer thread and launch
if(bUseViewer){
mpViewer = new Viewer(this,mpFrameDrawer,mpMapDrawer,mpTracker,strSettingsFile);
// 新建viewer线程
mptViewer = new thread(&Viewer::Run, mpViewer);
// 为跟踪设置对应的可视化
mpTracker->SetViewer(mpViewer);
}
/**
* Set pointers between threads 设置进程间的通信指针 和论文的三个线程相对应
* ORB-SLAM2 is composed of three main parallel threads: tracking, local mapping and loop closing,
* which can create a fourth thread to perform full BA after a loop closure.
* The tracking thread pre-processes the stereo or RGB-D input
* so that the rest of the system operates independently of the input sensor.
*/
mpTracker->SetLocalMapper(mpLocalMapper);
mpTracker->SetLoopClosing(mpLoopCloser);
mpLocalMapper->SetTracker(mpTracker);
mpLocalMapper->SetLoopCloser(mpLoopCloser);
mpLoopCloser->SetTracker(mpTracker);
mpLoopCloser->SetLocalMapper(mpLocalMapper);
}
/**
* Proccess the given stereo frame. Images must be synchronized(同步) and rectified(校正)
* Input images: RGB (CV_8UC3) or grayscale (CV_8U). RGB is converted to grayscale.
* Returns the camera pose (empty if tracking fails). 双目图像跟踪求位姿
*
* const cv::Mat &imLeft, 左目图像
* const cv::Mat &imRight, 右目图像
* const double ×tamp, 时间戳
*
* 针对三种不同类型的传感器设计三种运动跟踪接口
* 彩色图像为CV_8UC3类型,并且都将会被转换成为灰度图像
* 跟踪接口返回估计的相机位姿,如果跟踪失败则返回NULL
*/
cv::Mat System::TrackStereo(const cv::Mat &imLeft, const cv::Mat &imRight, const double ×tamp){
if(mSensor!=STEREO){
cerr << "ERROR: you called TrackStereo but input sensor was not set to STEREO." << endl;
exit(-1);
}
// Check mode change
{
unique_lock<mutex> lock(mMutexMode);
// 只开启定位模式 |跟踪|求位姿
if(mbActivateLocalizationMode){
mpLocalMapper->RequestStop();// 局部建图停止
// Wait until Local Mapping has effectively stopped
while(!mpLocalMapper->isStopped()){
usleep(1000);
}
mpTracker->InformOnlyTracking(true);// 只跟踪
mbActivateLocalizationMode = false;// 设置定位模式状态
}
// 定位模式和建图模式同时开启
if(mbDeactivateLocalizationMode){
mpTracker->InformOnlyTracking(false); //开启地图构建和跟踪模式
mpLocalMapper->Release();// 局部建图工作
mbDeactivateLocalizationMode = false;// 设置定位模式状态
}
}
// Check reset,检查是否有复位的操作
// Reset flag 复位标志
// std::mutex mMutexReset;
// bool mbReset;
{
unique_lock<mutex> lock(mMutexReset);//上锁
//是否有复位请求
if(mbReset){
mpTracker->Reset(); //有跟踪复位
mbReset = false; // 清除标志
}
}
/**
* 进行tracking过程
* Tracking* mpTracker; 获取运动跟踪状态
* GrabImageStereo运动估计函数输入左右目图像,可以为RGB、BGR、RGBA、GRAY
* 将图像转为mImGray和imGrayRight并初始化mCurrentFrame
* 用矩阵Tcw来保存估计的相机位姿,输出世界坐标系到该帧相机坐标系的变换矩阵
* const cv::Mat &imRectLeft, 左侧图像
* const cv::Mat &imRectRight, 右侧图像
* const double ×tamp, 时间戳
*/
cv::Mat Tcw = mpTracker->GrabImageStereo(imLeft,imRight,timestamp);
// 运动跟踪状态上锁
unique_lock<mutex> lock2(mMutexState);
// 获取运动跟踪状态
mTrackingState = mpTracker->mState;
// 获取当前帧跟踪到的地图点向量指针
mTrackedMapPoints = mpTracker->mCurrentFrame.mvpMapPoints;
// 获取当前帧跟踪到的关键帧特征点向量的指针
mTrackedKeyPointsUn = mpTracker->mCurrentFrame.mvKeysUn;
// 返回获得的相机运动估计
return Tcw;
}
/**
* Process the given rgbd frame. Depthmap must be registered(配准|匹配)to the RGB frame.
* Input image: RGB (CV_8UC3) or grayscale (CV_8U). RGB is converted to grayscale.
* Input depthmap: Float (CV_32F).
* Returns the camera pose (empty if tracking fails). RGBD图像跟踪
*
* const cv::Mat &im, 彩色图像
* const cv::Mat &depthmap, 深度图像
* const double ×tamp, 时间戳
*/
cv::Mat System::TrackRGBD(const cv::Mat &im, const cv::Mat &depthmap, const double ×tamp){
// 判断输入数据类型和摄像头类型是否符合
if(mSensor!=RGBD){
cerr << "ERROR: you called TrackRGBD but input sensor was not set to RGBD." << endl;
exit(-1);
}
// Check mode change 记录模式的变量 设置运行模式 定位同时建图,指定为不建图,载入之前建立好的地图。
// std::mutex mMutexMode;
// bool mbActivateLocalizationMode;
// bool mbDeactivateLocalizationMode;
{
unique_lock<mutex> lock(mMutexMode);
// OnlyTracking 只计算位姿
if(mbActivateLocalizationMode){
// Local Mapper. It manages the local map and performs local bundle adjustment.
mpLocalMapper->RequestStop();
// Wait until Local Mapping has effectively stopped
while(!mpLocalMapper->isStopped()){
usleep(1000);
}
mpTracker->InformOnlyTracking(true);
mbActivateLocalizationMode = false;
}
// Tracking and Mapping 计算位姿 计算点云 建立地图
if(mbDeactivateLocalizationMode){
mpTracker->InformOnlyTracking(false);
mpLocalMapper->Release();
mbDeactivateLocalizationMode = false;
}
}
// Check reset 是否被强制复位
{
unique_lock<mutex> lock(mMutexReset);
if(mbReset){
mpTracker->Reset();
mbReset = false;
}
}
/**
* const cv::Mat &imRGB,彩色图像
* const cv::Mat &imD,深度图像
* const double ×tamp,时间戳
* 输入左目RGB或RGBA图像和深度图
* 将图像转为mImGray灰度图和imDepth一起初始化mCurrentFrame
* 进行tracking跟踪过程,也就是求位姿的过程
* 输出世界坐标系到该帧相机坐标系的变换矩阵 获得相机位姿的估计
*/
cv::Mat Tcw = mpTracker->GrabImageRGBD(im,depthmap,timestamp);
/**
* Linux中提供一把互斥锁mutex(也称之为互斥量)
* 一个线程在对资源操作前都尝试先加锁,成功加锁才能操作,操作结束解锁。
* 同一时刻,只能有一个线程持有该锁
*/
unique_lock<mutex> lock2(mMutexState);
// eTrackingState mState; 跟踪状态
// Tracking state 记录跟踪状态
// int mTrackingState;
mTrackingState = mpTracker->mState;
/**
* MapPoints associated to keypoints, NULL pointer if no association.
* 每个特征点keypoints对应地图点MapPoint, 如果特征点没有对应的地图点,将存储一个空指针.
* std::vector<MapPoint*> mTrackedMapPoints;
* Frame mCurrentFrame; 跟踪线程的一个Current Frame(当前帧)
* std::vector<MapPoint*> mvpMapPoints;
* std::vector<cv::KeyPoint> mTrackedKeyPointsUn;
* std::vector<cv::KeyPoint> mvKeysUn; 校正mvKeys后的特征点
*/
mTrackedMapPoints = mpTracker->mCurrentFrame.mvpMapPoints;
mTrackedKeyPointsUn = mpTracker->mCurrentFrame.mvKeysUn;
return Tcw;
}
/**
* Proccess the given monocular frame
* Input images: RGB (CV_8UC3) or grayscale (CV_8U). RGB is converted to grayscale.
* Returns the camera pose (empty if tracking fails).单目图像跟踪
*
* const cv::Mat &im, 图像
* const double ×tamp, 时间戳
*/
cv::Mat System::TrackMonocular(const cv::Mat &im, const double ×tamp){
if(mSensor!=MONOCULAR){
cerr << "ERROR: you called TrackMonocular but input sensor was not set to Monocular." << endl;
exit(-1);
}
// Check mode change
{
// 独占锁,主要是为了mbActivateLocalizationMode和mbDeactivateLocalizationMode不会发生混乱
unique_lock<mutex> lock(mMutexMode);
// mbActivateLocalizationMode为true会关闭局部地图线程
if(mbActivateLocalizationMode){
mpLocalMapper->RequestStop();
// Wait until Local Mapping has effectively stopped
while(!mpLocalMapper->isStopped()){
usleep(1000);
}
// 局部地图关闭以后,设置mbOnlyTracking为真,只进行跟踪的线程,只计算相机的位姿,没有对局部地图进行更新
mpTracker->InformOnlyTracking(true);
// 关闭线程可以使得别的线程得到更多的资源
mbActivateLocalizationMode = false;
}
// 如果mbDeactivateLocalizationMode是true,局部地图线程就被释放, 关键帧从局部地图中删除.
if(mbDeactivateLocalizationMode){
mpTracker->InformOnlyTracking(false);
mpLocalMapper->Release();
mbDeactivateLocalizationMode = false;
}
}
// Check reset
{
unique_lock<mutex> lock(mMutexReset);
if(mbReset){
mpTracker->Reset();
mbReset = false;
}
}
// 获取相机位姿的估计结果
cv::Mat Tcw = mpTracker->GrabImageMonocular(im,timestamp);
unique_lock<mutex> lock2(mMutexState);
mTrackingState = mpTracker->mState;
mTrackedMapPoints = mpTracker->mCurrentFrame.mvpMapPoints;
mTrackedKeyPointsUn = mpTracker->mCurrentFrame.mvKeysUn;
return Tcw;
}
/**
* Save camera trajectory in the TUM RGB-D dataset format.
* NOTE Only for stereo and RGB-D. This method does not work for monocular.
* Call first Shutdown()
* See format details at: http://vision.in.tum.de/data/datasets/rgbd-dataset
* 保存相机的运动轨迹TUM数据集的格式,保存轨迹操作要在Shutdown函数之后调用
* 按照TUM格式保存相机运行轨迹并保存到指定的文件 filename 用来存储轨迹的文件名字
*/
void System::SaveTrajectoryTUM(const string &filename){
cout << endl << "Saving camera trajectory to " << filename << " ..." << endl;
// 只有在传感器为双目或者RGBD时才可以工作
if(mSensor==MONOCULAR){
cerr << "ERROR: SaveTrajectoryTUM cannot be used for monocular." << endl;
return;
}
// 从地图中获取所有的关键帧
vector<KeyFrame*> vpKFs = mpMap->GetAllKeyFrames();
// 根据关键帧生成的先后顺序(lId)进行排序
sort(vpKFs.begin(),vpKFs.end(),KeyFrame::lId);
// Transform all keyframes so that the first keyframe is at the origin.
// After a loop closure the first keyframe might not be at the origin.
// 获取第一个关键帧的位姿的逆,并将第一帧作为世界坐标系
cv::Mat Two = vpKFs[0]->GetPoseInverse();
// 文件写入的准备工作
ofstream f;
f.open(filename.c_str());
// 输出浮点数的时候不使用科学计数法
f << fixed;
/**
* Frame pose is stored relative to its reference keyframe (which is optimized by BA and pose graph).
* We need to get first the keyframe pose and then concatenate the relative transformation.
* Frames not localized (tracking failure) are not saved.
* 之前的帧位姿都是基于其参考关键帧的,现在我们把它恢复
*
* For each frame we have a reference keyframe (lRit), the timestamp (lT) and a flag
* which is true when tracking failed (lbL).
* 参考关键帧列表
*/
list<ORB_SLAM2::KeyFrame*>::iterator lRit = mpTracker->mlpReferences.begin();
// 所有帧对应的时间戳列表
list<double>::iterator lT = mpTracker->mlFrameTimes.begin();
// 每帧的追踪状态组成的列表
list<bool>::iterator lbL = mpTracker->mlbLost.begin();
// 对于每一个mlRelativeFramePoses中的帧lit
for(list<cv::Mat>::iterator lit=mpTracker->mlRelativeFramePoses.begin(),
lend=mpTracker->mlRelativeFramePoses.end();
lit!=lend;
lit++, lRit++, lT++, lbL++)
{
// 如果该帧跟踪失败,进行下一个
if(*lbL)
continue;
// 获取其对应的参考关键帧
KeyFrame* pKF = *lRit;
// 变换矩阵的初始化,初始化为一个单位阵
cv::Mat Trw = cv::Mat::eye(4,4,CV_32F);
// If the reference keyframe was culled(剔除), traverse the spanning tree to get a suitable keyframe.
// 查看当前使用的参考关键帧是否为bad
while(pKF->isBad()){
// 更新关键帧变换矩阵的初始值,
Trw = Trw*pKF->mTcp;
// 并且更新到原关键帧的父关键帧
pKF = pKF->GetParent();
}
// 最后一个Two是原点校正
// 最终得到的是参考关键帧相对于世界坐标系的变换
Trw = Trw*pKF->GetPose()*Two;
// 在此基础上得到相机当前帧相对于世界坐标系的变换
cv::Mat Tcw = (*lit)*Trw;
// 然后分解出旋转矩阵
cv::Mat Rwc = Tcw.rowRange(0,3).colRange(0,3).t();
// 分解出平移向量
cv::Mat twc = -Rwc*Tcw.rowRange(0,3).col(3);
// 用四元数表示旋转
vector<float> q = Converter::toQuaternion(Rwc);
// 然后按照给定的格式输出到文件中
f << setprecision(6) << *lT << " " << setprecision(9) << twc.at<float>(0) << " " << twc.at<float>(1) << " " << twc.at<float>(2) << " " << q[0] << " " << q[1] << " " << q[2] << " " << q[3] << endl;
}
// 关闭文件
f.close();
cout << endl << "trajectory saved!" << endl;
}
/**
* 保存关键帧的轨迹
* filename 用来存储轨迹的文件名字
* Save keyframe poses in the TUM RGB-D dataset format.
* NOTE This method works for all sensor input.
* Call first Shutdown()
* See format details at: http://vision.in.tum.de/data/datasets/rgbd-dataset
* 保存相机的运动轨迹(TUM数据集的格式,保存轨迹操作要在Shutdown函数之后调用
*/
void System::SaveKeyFrameTrajectoryTUM(const string &filename){
cout << endl << "Saving keyframe trajectory to " << filename << " ..." << endl;
//获取关键帧vector并按照生成时间对其进行排序
vector<KeyFrame*> vpKFs = mpMap->GetAllKeyFrames();
sort(vpKFs.begin(),vpKFs.end(),KeyFrame::lId);
// Transform all keyframes so that the first keyframe is at the origin.
// After a loop closure the first keyframe might not be at the origin.
// cv::Mat Two = vpKFs[0]->GetPoseInverse();
ofstream f;
f.open(filename.c_str());
f << fixed;
// 遍历关键帧
for(size_t i=0; i<vpKFs.size(); i++)
{
// 获取该关键帧
KeyFrame* pKF = vpKFs[i];
// pKF->SetPose(pKF->GetPose()*Two);
if(pKF->isBad())
continue;
// 抽取旋转部分和平移部分,前者使用四元数表示
cv::Mat R = pKF->GetRotation().t();
vector<float> q = Converter::toQuaternion(R);
cv::Mat t = pKF->GetCameraCenter();
//按照给定的格式输出到文件中
f << setprecision(6) << pKF->mTimeStamp << setprecision(7) << " " << t.at<float>(0) << " " << t.at<float>(1) << " " << t.at<float>(2)
<< " " << q[0] << " " << q[1] << " " << q[2] << " " << q[3] << endl;
}
f.close();
cout << endl << "trajectory saved!" << endl;
}
/**
* 按照KITTI数据集的格式将相机的运动轨迹保存到文件中
* filename 用来存储轨迹的文件名字
* Save camera trajectory in the KITTI dataset format.
* NOTE Only for stereo and RGB-D. This method does not work for monocular.
* Call first Shutdown()
* See format details at: http://www.cvlibs.net/datasets/kitti/eval_odometry.php
* 保存相机的运动轨迹(以KITTI数据集的格式,保存轨迹操作要在Shutdown函数之后调用
*/
void System::SaveTrajectoryKITTI(const string &filename){
cout << endl << "Saving camera trajectory to " << filename << " ..." << endl;
if(mSensor==MONOCULAR){
cerr << "ERROR: SaveTrajectoryKITTI cannot be used for monocular." << endl;
return;
}
vector<KeyFrame*> vpKFs = mpMap->GetAllKeyFrames();
sort(vpKFs.begin(),vpKFs.end(),KeyFrame::lId);
// Transform all keyframes so that the first keyframe is at the origin.
// After a loop closure the first keyframe might not be at the origin.
cv::Mat Two = vpKFs[0]->GetPoseInverse();
ofstream f;
f.open(filename.c_str());
f << fixed;
// Frame pose is stored relative to its reference keyframe (which is optimized by BA and pose graph).
// We need to get first the keyframe pose and then concatenate the relative transformation.
// Frames not localized (tracking failure) are not saved.
// For each frame we have a reference keyframe (lRit), the timestamp (lT) and a flag
// which is true when tracking failed (lbL).
list<ORB_SLAM2::KeyFrame*>::iterator lRit = mpTracker->mlpReferences.begin();
list<double>::iterator lT = mpTracker->mlFrameTimes.begin();
for(list<cv::Mat>::iterator lit=mpTracker->mlRelativeFramePoses.begin(), lend=mpTracker->mlRelativeFramePoses.end();lit!=lend;lit++, lRit++, lT++)
{
ORB_SLAM2::KeyFrame* pKF = *lRit;
cv::Mat Trw = cv::Mat::eye(4,4,CV_32F);
while(pKF->isBad()){
Trw = Trw*pKF->mTcp;
pKF = pKF->GetParent();
}
Trw = Trw*pKF->GetPose()*Two;
cv::Mat Tcw = (*lit)*Trw;
cv::Mat Rwc = Tcw.rowRange(0,3).colRange(0,3).t();
cv::Mat twc = -Rwc*Tcw.rowRange(0,3).col(3);
f << setprecision(9) << Rwc.at<float>(0,0) << " " << Rwc.at<float>(0,1) << " " << Rwc.at<float>(0,2) << " " << twc.at<float>(0) << " " <<
Rwc.at<float>(1,0) << " " << Rwc.at<float>(1,1) << " " << Rwc.at<float>(1,2) << " " << twc.at<float>(1) << " " <<
Rwc.at<float>(2,0) << " " << Rwc.at<float>(2,1) << " " << Rwc.at<float>(2,2) << " " << twc.at<float>(2) << endl;
}
f.close();
cout << endl << "trajectory saved!" << endl;
}
/**
* This stops local mapping thread (map building) and performs only camera tracking.
* 激活定位模式 局部建图部分不工作载入已经有的地图 仅有跟踪部分工作
*/
void System::ActivateLocalizationMode(){
unique_lock<mutex> lock(mMutexMode);// 上锁
mbActivateLocalizationMode = true; // 设置标志
}
/**
* This resumes local mapping thread and performs SLAM again.
* 取消只定位模式 局部建图部分工作,跟踪部分工作,
*/
void System::DeactivateLocalizationMode(){
unique_lock<mutex> lock(mMutexMode);
mbDeactivateLocalizationMode = true;
}
/**
* Returns true if there have been a big map change (loop closure, global BA)
* since last call to this function
* 记录地图是否改变的变量
*/
bool System::MapChanged(){
static int n=0;
//其实整个函数功能实现的重点还是在这个GetLastBigChangeIdx函数上
int curn = mpMap->GetLastBigChangeIdx();
if(n<curn){
n=curn;
return true;
}
else
return false;
}
/**
* Reset the system (clear map)
* 复位SLAM系统就是清空地图
*/
void System::Reset(){
unique_lock<mutex> lock(mMutexReset);
mbReset = true;
}
/**
* All threads will be requested to finish.
* It waits until all threads have finished.
* This function must be called before saving the trajectory.
* 关闭SLAM系统的所有线程, 然后保存轨迹到地图.
*/
void System::Shutdown(){
// 对局部建图线程和回环检测线程发送终止请求
mpLocalMapper->RequestFinish();
mpLoopCloser->RequestFinish();
// 使用可视化窗口
if(mpViewer){
// 向可视化窗口发送终止请求
mpViewer->RequestFinish();
while(!mpViewer->isFinished())
usleep(5000);
}
// Wait until all thread have effectively stopped
while(!mpLocalMapper->isFinished() ||
!mpLoopCloser->isFinished() ||
mpLoopCloser->isRunningGBA())
{
usleep(5000);
}
if(mpViewer)
// 可视化窗口
pangolin::BindToContext("ORB-SLAM2: Map Viewer");
}
/**
* 获取当前帧的跟踪状态
* Information from most recent processed frame
* You can call this right after TrackMonocular (or stereo or RGBD)
* 记录最近的帧的跟踪状态 int GetTrackingState();
*
* std::mutex mMutexState;
*
* Tracking state 记录跟踪状态 int mTrackingState;
*/
int System::GetTrackingState(){
unique_lock<mutex> lock(mMutexState);
return mTrackingState;
}
/**
* 获取跟踪到的地图点
* std::mutex mMutexState;
* std::vector<MapPoint*> mTrackedMapPoints;
* std::vector<MapPoint*> GetTrackedMapPoints();
*/
vector<MapPoint*> System::GetTrackedMapPoints(){
unique_lock<mutex> lock(mMutexState);
return mTrackedMapPoints;
}
/**
* 获取跟踪到的关键帧上的关键点
* std::vector<cv::KeyPoint> GetTrackedKeyPointsUn();
* std::vector<cv::KeyPoint> mTrackedKeyPointsUn;
*
* The keypoint is characterized by the 2D position,
* a point feature found by one of many available keypoint detectors,
* such as cv::FAST, cv::StarDetector, cv::SURF, cv::SIFT,
*/
vector<cv::KeyPoint> System::GetTrackedKeyPointsUn(){
unique_lock<mutex> lock(mMutexState);
return mTrackedKeyPointsUn;
}
} //namespace ORB_SLAM