人工智能:物体检测之Faster RCNN模型
物体检测
- 什么是物体检测
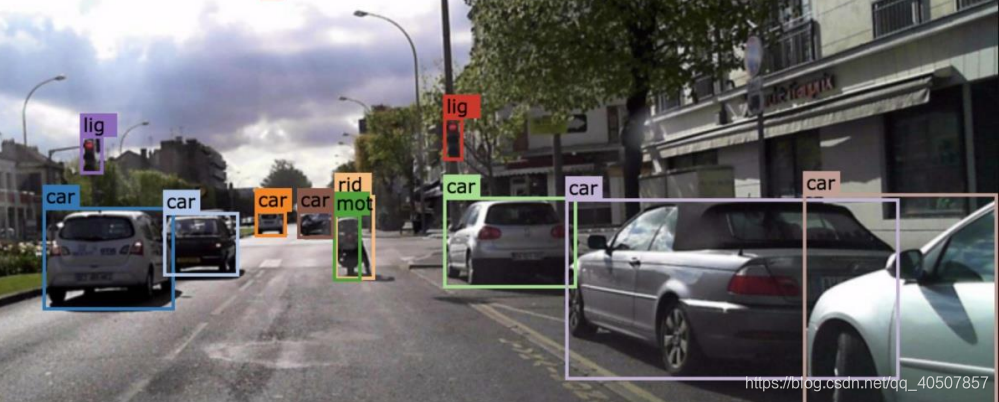
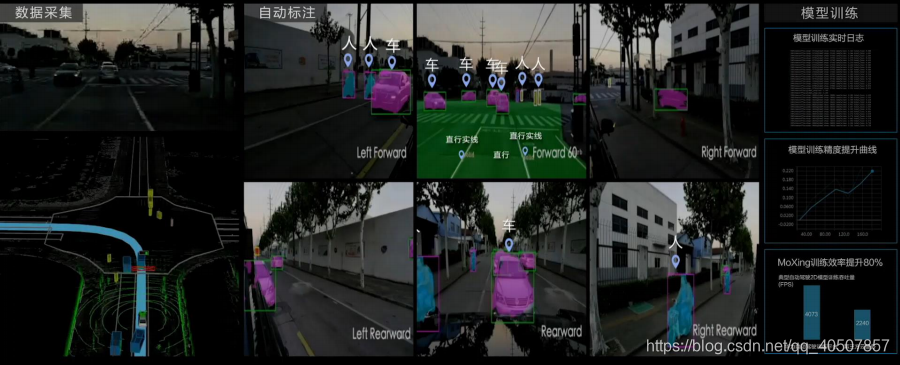
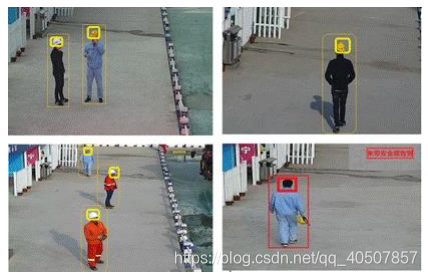
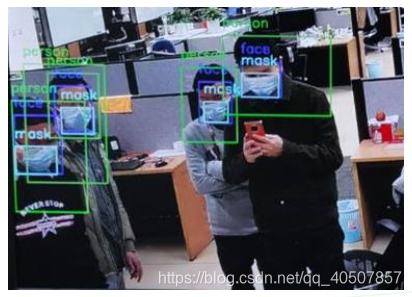
- 物体检测应用场景
- 物体检测开源数据集


Faster RCNN模型
简介
-
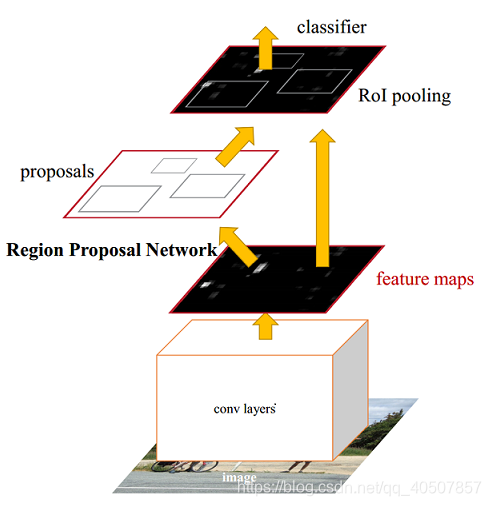
Faster RCNN由Ross Girshick等人于2016年将其用于目标检测任务中,与传统RCNN相比,利用RPN(Region Proposal Networks)完成候选框的选择,Faster RCNN的结构如下所示。
-
Faster R-CNN模型分为两部分,一是RPN(Region Proposal Network),二是Faster R-CNN。
-
RPN包括proposal和conv layers,Faster R-CNN包括卷积层、ROI Pooling及后面的全连接层部分。
-
首先将整张图片输入CNN,提取图片的features maps,再将图片特征输入RPN,得到候选框的特征信息。
-
RPN对于候选框提出的特征,使用分类器判别是否属于待识别的目标,将属于某一类别的候选框,用回归器进一步调整其位置。
-
最后将目标框和图片特征向量输入到Roi Pooling中层,再通过分类器进行分类,完成目标检测的任务。RPN能够协助Fast RNN将注意力集中在候选框中。
卷积层
- Faster RCNN首先将整张图片输进CNN,提取图片的feature map,再将其输入到到RPN,得到候选框的特征信息。
- 这里采用VGG16完成feature map的提取。
- 卷积层是被RPN和Fast R-CNN两部分共享的。
RPN
- 相比于Fast RCNN,Faster R-CNN引入RPN(Region Proposal Network)完成候选框的提取,使得算法效率得到进一步提升。
- RPN将任意尺寸大小的图片作为输入,输出若干个矩形候选框。为了生成区域候选框,在卷积层最后一层feature map上滑动一个(nn)的网络,将卷积生成的feature map与(nn)的窗口进行卷积运算。
- 每一个滑动窗口都映射为一个更低维的特征。得到的特征送入两个分支中,一个用于框分类,另一个用于框回归。此网络执行滑动窗口形式,所有空间位置都共享全连接层。
Roi Pooling
- Fast R-CNN改进了R-CNN,应用了Roi Pooling。
- 由于在全连接层,需要输入固定大小的特征向量,R-CNN网络经过warp操作统一成固定的大小再送入后续网络,导致图像的变形和扭曲。
- 而且每一个proposal均需要单独进行特征提取,重复计算量大。
- Poipooling通过卷积计算将图像统一成固定大小的特征向量。
- Roi Pooling的输入是卷积层得到的feature map和RNP得到的anchor,将其分割成7 * 7大小的子窗口,对每个子窗口进行max-pooling操作,输出ROI(region of interest)的feature map。输入后续的全连接层判断目标。
Classifier
在这一步,分类器完成对候选区域的检测。利用RoI feature maps计算ROI类别,同时再次bounding box regression获得目标最终的位置。