以前我们在用px4和地面站时,是通过数传来连接飞控和地面站。现在我们在飞控上连接了带有wifi的机载计算机,能够通过机载计算机作为中转,让飞控有线连接机载计算机,然后机载计算机通过wifi连接地面站。
方法
机载计算机和地面站计算机需要连在一个wifi下才行
启动mavros时加上连接地面站的参数即可:
我们原先没有连地脉站的命令是:
roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:921600
里面fcu_url参数是飞控的端口。
现在我们加上地面站的参数:
roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:921600 gcs_url:=udp://@172.16.254.1
其中gcs_url:=udp:后面跟的就是地面站所在计算机的ip地址
**
(注意:机载计算机和地面站计算机需要连在一个wifi下才行)
**
查看地面站ip地址方法:ifconfig
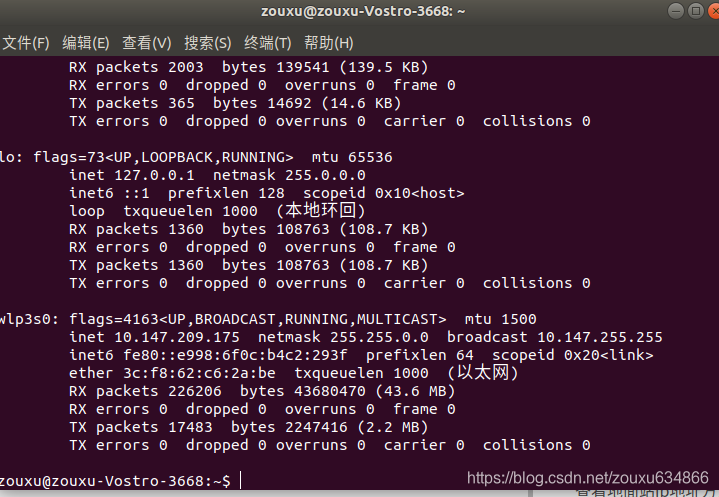
其中wlp3s0的inet那一项就是ip。
只要地面站是打开的,运行roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:921600 gcs_url:=udp://@172.16.254.1就会自动连上
补充:如果我们不知道地脉站ip,还可以通过:
扫描二维码关注公众号,回复:
11310649 查看本文章

roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:921600 gcs_url:=udp-b://@
这个会一直寻找地址直到QGC连上为止