1.kdtree原理介绍:
参考:详解KDTree
2.K近邻搜索
#include <iostream>
#include <vector>
#include <pcl/kdtree/kdtree_flann.h> //kdtree近邻搜索
#include <pcl/io/pcd_io.h> //文件输入输出
#include <pcl/point_types.h> //点类型相关定义
#include <pcl/visualization/pcl_visualizer.h>//可视化相关定义
using namespace std;
int main()
{
//读取点云数据
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
if (pcl::io::loadPCDFile<pcl::PointXYZRGB>("Road - Cloud.pcd", *cloud) == -1)
{
PCL_ERROR("Cloudn't read file!");
return -1;
}
//建立kd-tree
pcl::KdTreeFLANN<pcl::PointXYZRGB> kdtree; //建立kdtree对象
kdtree.setInputCloud(cloud); //设置需要建立kdtree的点云指针
//K近邻搜索
pcl::PointXYZRGB searchPoint = cloud->points[1000]; //设置查找点
cloud->points[1000].r = 0;//查询点着色(绿色)
cloud->points[1000].g = 255;
cloud->points[1000].b = 0;
int K = 100; //设置需要查找的近邻点个数
vector<int> pointIdxNKNSearch(K); //保存每个近邻点的索引
vector<float> pointNKNSquaredDistance(K); //保存每个近邻点与查找点之间的欧式距离平方
cout << "K nearest neighbor search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with K=" << K << endl;
if (kdtree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
for (size_t i = 1; i < pointIdxNKNSearch.size(); ++i){ //i=1时不包含被查询点本身,i=0时包含被查询点
cloud->points[pointIdxNKNSearch[i]].r = 255;//查询点邻域内的点着色
cloud->points[pointIdxNKNSearch[i]].g = 0;
cloud->points[pointIdxNKNSearch[i]].b = 0;
}
}
cout << "K = 100近邻点个数:" << pointIdxNKNSearch.size() << endl;
//可视化
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
viewer->addPointCloud<pcl::PointXYZRGB>(cloud, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud"); // 设置点云大小
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(10000));
}
return 0;
}
3.KD树半径搜索
#include <iostream>
#include <vector>
#include <pcl/kdtree/kdtree_flann.h> //kdtree近邻搜索
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>//可视化相关定义
using namespace std;
int main()
{
//读取点云
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
if (pcl::io::loadPCDFile<pcl::PointXYZRGB>("Road - Cloud.pcd", *cloud) == -1)
{
PCL_ERROR("Cloudn't read file!");
return -1;
}
//建立kd-tree
pcl::KdTreeFLANN<pcl::PointXYZRGB> kdtree; //建立kdtree对象
kdtree.setInputCloud(cloud); //设置需要建立kdtree的点云指针
//radius半径搜索
pcl::PointXYZRGB searchPoint = cloud->points[1000]; //设置查找点
cloud->points[1000].r = 0;
cloud->points[1000].g = 255;
cloud->points[1000].b = 0;
vector<int> pointIdxRadiusSearch; //保存每个近邻点的索引
vector<float> pointRadiusSquaredDistance; //保存每个近邻点与查找点之间的欧式距离平方
float radius = 3; //设置查找半径范围
cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << endl;
if (kdtree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (size_t i = 1; i < pointIdxRadiusSearch.size(); ++i){
cloud->points[pointIdxRadiusSearch[i]].r = 255;
cloud->points[pointIdxRadiusSearch[i]].g = 0;
cloud->points[pointIdxRadiusSearch[i]].b = 0;
}
}
cout << "半径3近邻点个数: " << pointIdxRadiusSearch.size() << endl;
//可视化
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
viewer->addPointCloud<pcl::PointXYZRGB>(cloud, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud"); // 设置点云大小
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(10000));
}
return 0;
}
4.结果展示
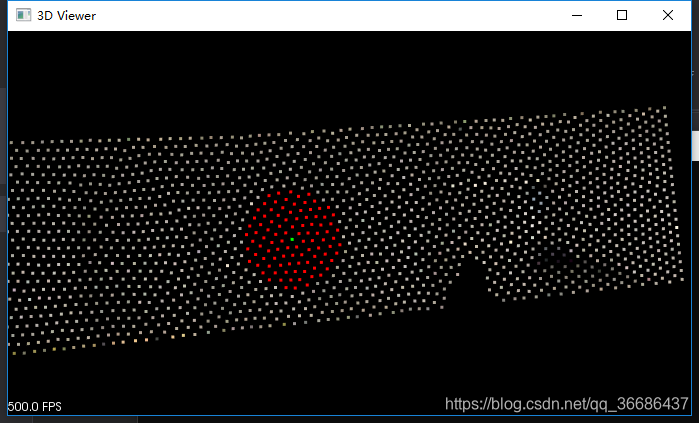
绿色为搜索点,红色为搜索点邻域内的点