问题B 智能RGV的动态调度策略
图1是一个智能加工系统的示意图,由8台计算机数控机床(Computer Number Controller,CNC)、1辆轨道式自动引导车(Rail Guide Vehicle,RGV)、1条RGV直线轨道、1条上料传送带、1条下料传送带等附属设备组成。RGV是一种无人驾驶、能在固定轨道上自由运行的智能车。它根据指令能自动控制移动方向和距离,并自带一个机械手臂、两只机械手爪和物料清洗槽,能够完成上下料及清洗物料等作业任务(参见附件1)。
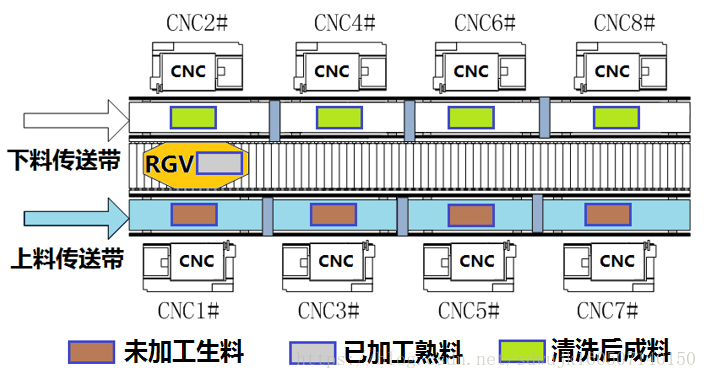
图1:智能加工系统示意图
针对下面的三种具体情况:
(1)一道工序的物料加工作业情况,每台CNC安装同样的刀具,物料可以在任一台CNC上加工完成;
(2)两道工序的物料加工作业情况,每个物料的第一和第二道工序分别由两台不同的CNC依次加工完成;
(3)CNC在加工过程中可能发生故障(据统计:故障的发生概率约为1%)的情况,每次故障排除(人工处理,未完成的物料报废)时间介于10~20分钟之间,故障排除后即刻加入作业序列。要求分别考虑一道工序和两道工序的物料加工作业情况。
请你们团队完成下列两项任务:
任务1:对一般问题进行研究,给出RGV动态调度模型和相应的求解算法;
任务2:利用表1中系统作业参数的3组数据分别检验模型的实用性和算法的有效性,给出RGV的调度策略和系统的作业效率,并将具体的结果分别填入附件2的EXCEL表中。
表1:智能加工系统作业参数的3组数据表 时间单位:秒
| 系统作业参数 |
第1组 |
第2组 |
第3组 |
| RGV移动1个单位所需时间 |
20 |
23 |
18 |
| RGV移动2个单位所需时间 |
33 |
41 |
32 |
| RGV移动3个单位所需时间 |
46 |
59 |
46 |
| CNC加工完成一个一道工序的物料所需时间 |
560 |
580 |
545 |
| CNC加工完成一个两道工序物料的第一道工序所需时间 |
400 |
280 |
455 |
| CNC加工完成一个两道工序物料的第二道工序所需时间 |
378 |
500 |
182 |
| RGV为CNC1#,3#,5#,7#一次上下料所需时间 |
28 |
30 |
27 |
| RGV为CNC2#,4#,6#,8#一次上下料所需时间 |
31 |
35 |
32 |
| RGV完成一个物料的清洗作业所需时间 |
25 |
30 |
25 |
注:每班次连续作业8小时。
附件1:智能加工系统的组成与作业流程
1.系统的场景及实物图说明
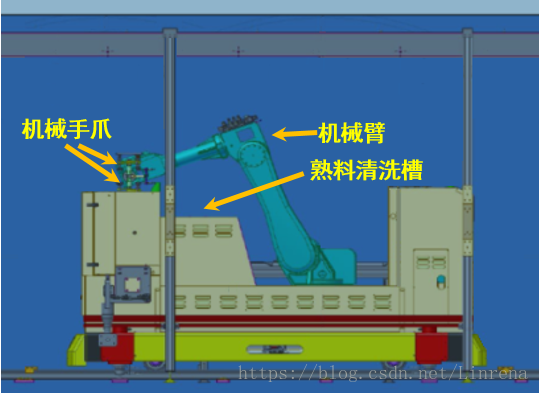
在附图1中,中间设备是自带清洗槽和机械手的轨道式自动引导车RGV,清洗槽每次只能清洗1个物料,机械手臂前端有2个手爪,通过旋转可以先后各抓取1个物料,完成上下料作业。两边排列的是CNC,每台CNC前方各安装有一段物料传送带。右侧为上料传送带,负责为CNC输送生料(未加工的物料);左边为下料传送带,负责将成料(加工并清洗完成的物料)送出系统。其他为保证系统正常运行的辅助设备。

附图一 附图二
附图三 附图四
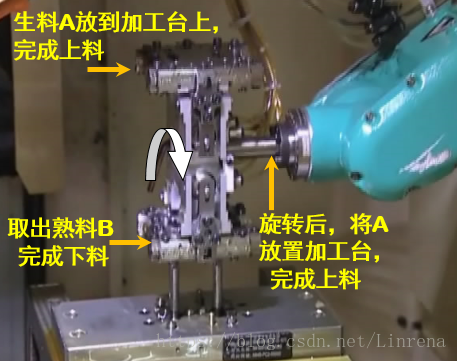
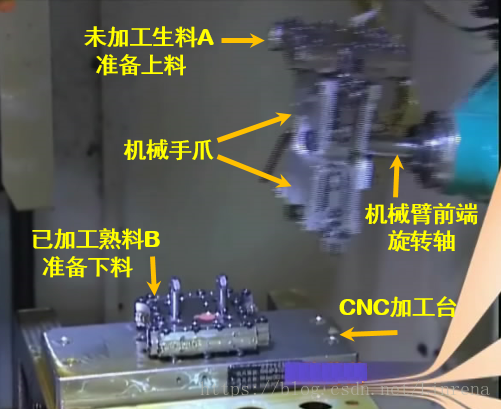
在附图3左图中,机械臂前端上方手爪抓有1个生料A,CNC加工台上有1个熟料B。RGV机械臂移动到CNC加工台上方,机械臂下方空置的手爪准备抓取熟料B,在抓取了熟料B后即完成下料作业。
在附图3右图中,RGV机械臂下方手爪已抓取了CNC加工台上的熟料B抬高手臂,并旋转手爪,将生料A对准加工位置,安放到CNC加工台上,即完成上料作业。
2.系统的构成及说明
智能加工系统由8台CNC、1台带机械手和清洗槽的RGV、1条RGV直线轨道、1条上料传送带和1条下料传送带等附属设备构成。
(1)CNC:在上料传送带和下料传送带的两侧各安装4台CNC,等距排列,每台CNC同一时间只能安装1种刀具加工1个物料。
如果物料的加工过程需要两道工序,则需要有不同的CNC安装不同的刀具分别加工完成,在加工过程中不能更换刀具。第一和第二道工序需要在不同的CNC上依次加工完成,完成时间也不同,每台CNC只能完成其中的一道工序。
(2)RGV:RGV带有智能控制功能,能够接收和发送指令信号。根据指令能在直线轨道上移动和停止等待,可连续移动1个单位(两台相邻CNC间的距离)、2个单位(三台相邻CNC间的距离)和3个单位(四台相邻CNC间的距离)。RGV同一时间只能执行移动、停止等待、上下料和清洗作业中的一项。
(3)上料传送带:上料传送带由4段组成,在奇数编号CNC1#、3#、5#、7#前各有1段。由系统传感器控制,只能向一个方向传动,既能连动,也能独立运动。
(4)下料传送带:下料传送带由4段组成,在偶数编号CNC2#、4#、6#、8#前各有1段。由传感器控制,只能向同一个方向传动,既能连动,也能独立运动。
3. 系统的作业流程
(1)智能加工系统通电启动后,RGV在CNC1#和CNC2#正中间的初始位置,所有CNC都处于空闲状态。
(2)在工作正常情况下,如果某CNC处于空闲状态,则向RGV发出上料需求信号;否则,CNC处于加工作业状态,在加工作业完成即刻向RGV发出需求信号。
(3)RGV在收到某CNC的需求信号后,它会自行确定该CNC的上下料作业次序,并依次按顺序为其上下料作业。根据需求指令,RGV运行至需要作业的某CNC处,同时上料传送带将生料送到该CNC正前方,供RGV上料作业。
RGV为偶数编号CNC一次上下料所需时间要大于为奇数编号CNC一次上下料所需时间。
(4)在RGV为某CNC完成一次上下料作业后,就会转动机械臂,将一只机械手上的熟料移动到清洗槽上方,进行清洗作业(只清洗加工完成的熟料)。
具体过程:首先用另一只机械手抓取出清洗槽中的成料、转动手爪、放入熟料到清洗槽中,然后转动机械臂,将成料放到下料传送带上送出系统。这个作业过程所需要的时间称为RGV清洗作业时间,并且在这个过程中RGV不能移动。
熟料在清洗槽中的实际清洗时间是很短的,远小于机械手将成料放到下料传送带上的时间。
(5)RGV在完成一项作业任务后,立即判别执行下一个作业指令。此时,如果没有接到其他的作业指令,则RGV就在原地等待直到下一个作业指令。
某CNC完成一个物料的加工作业任务后,即刻向RGV发出需求信号。如果RGV没能即刻到达为其上下料,该CNC就会出现等待。
(6)系统周而复始地重复(3)至(5),直到系统停止作业,RGV回到初始位置。
相关算法:
神经网络
遗传算法
贪婪算法
蒙特卡洛
最优化
最短路径问题
排队论
动态规划
多元统计分析
版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/Linrena/article/details/82718349
