Tensorflow2.0之 YOLO篇模型搭建与训练
这一篇我们就要结束yolo2的代码了,代码和相关资料的下载链接在博客的最后面,文章只是模型搭建和训练的过程,代码里面涉及到的一些函数是上几篇博客中提到的,有兴趣可以去看看。
模型搭建
YOLO的训练模型我们选择在进行优化Dartnet-19,并选择其的参数数据进行初始化
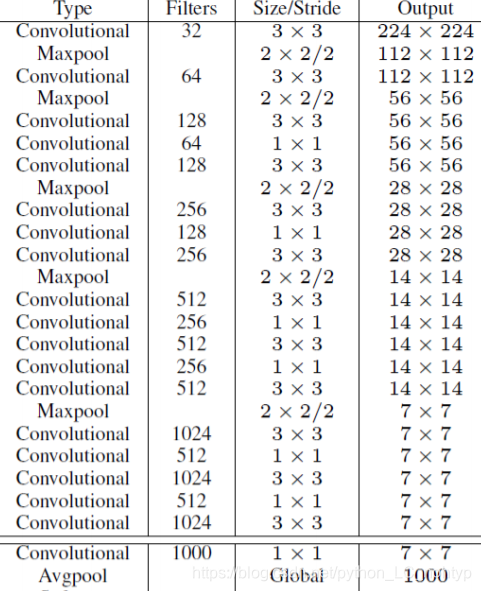
- DartNet
class SpaceToDepth(layers.Layer):
def __init__(self, block_size, **kwargs):
self.block_size = block_size
super(SpaceToDepth, self).__init__(**kwargs)
def call(self, inputs):
x = inputs
batch, height, width, depth = K.int_shape(x)
batch = -1
reduced_height = height // self.block_size
reduced_width = width // self.block_size
y = K.reshape(x, (batch, reduced_height, self.block_size,
reduced_width, self.block_size, depth))
z = K.permute_dimensions(y, (0, 1, 3, 2, 4, 5))
t = K.reshape(z, (batch, reduced_height, reduced_width, depth * self.block_size ** 2))
return t
def compute_output_shape(self, input_shape):
shape = (input_shape[0], input_shape[1] // self.block_size, input_shape[2] // self.block_size,
input_shape[3] * self.block_size ** 2)
return tf.TensorShape(shape)
# 3.1
input_image = layers.Input((IMGSZ, IMGSZ, 3), dtype='float32')
# unit1
x = layers.Conv2D(32, (3, 3), strides=(1, 1), padding='same', name='conv_1', use_bias=False)(input_image)
x = layers.BatchNormalization(name='norm_1')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
x = layers.MaxPooling2D(pool_size=(2, 2))(x)
# unit2
x = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', name='conv_2', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_2')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
x = layers.MaxPooling2D(pool_size=(2, 2))(x)
# Layer 3
x = layers.Conv2D(128, (3, 3), strides=(1, 1), padding='same', name='conv_3', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_3')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 4
x = layers.Conv2D(64, (1, 1), strides=(1, 1), padding='same', name='conv_4', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_4')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 5
x = layers.Conv2D(128, (3, 3), strides=(1, 1), padding='same', name='conv_5', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_5')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
x = layers.MaxPooling2D(pool_size=(2, 2))(x)
# Layer 6
x = layers.Conv2D(256, (3, 3), strides=(1, 1), padding='same', name='conv_6', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_6')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 7
x = layers.Conv2D(128, (1, 1), strides=(1, 1), padding='same', name='conv_7', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_7')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 8
x = layers.Conv2D(256, (3, 3), strides=(1, 1), padding='same', name='conv_8', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_8')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
x = layers.MaxPooling2D(pool_size=(2, 2))(x)
# Layer 9
x = layers.Conv2D(512, (3, 3), strides=(1, 1), padding='same', name='conv_9', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_9')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 10
x = layers.Conv2D(256, (1, 1), strides=(1, 1), padding='same', name='conv_10', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_10')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 11
x = layers.Conv2D(512, (3, 3), strides=(1, 1), padding='same', name='conv_11', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_11')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 12
x = layers.Conv2D(256, (1, 1), strides=(1, 1), padding='same', name='conv_12', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_12')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 13
x = layers.Conv2D(512, (3, 3), strides=(1, 1), padding='same', name='conv_13', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_13')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# for skip connection
skip_x = x # [b,32,32,512]
x = layers.MaxPooling2D(pool_size=(2, 2))(x)
# Layer 14
x = layers.Conv2D(1024, (3, 3), strides=(1, 1), padding='same', name='conv_14', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_14')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 15
x = layers.Conv2D(512, (1, 1), strides=(1, 1), padding='same', name='conv_15', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_15')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 16
x = layers.Conv2D(1024, (3, 3), strides=(1, 1), padding='same', name='conv_16', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_16')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 17
x = layers.Conv2D(512, (1, 1), strides=(1, 1), padding='same', name='conv_17', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_17')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 18
x = layers.Conv2D(1024, (3, 3), strides=(1, 1), padding='same', name='conv_18', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_18')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 19
x = layers.Conv2D(1024, (3, 3), strides=(1, 1), padding='same', name='conv_19', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_19')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 20
x = layers.Conv2D(1024, (3, 3), strides=(1, 1), padding='same', name='conv_20', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_20')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
# Layer 21
skip_x = layers.Conv2D(64, (1, 1), strides=(1, 1), padding='same', name='conv_21', use_bias=False)(skip_x)
skip_x = layers.BatchNormalization(name='norm_21')(skip_x)
skip_x = layers.LeakyReLU(alpha=0.1)(skip_x)
skip_x = SpaceToDepth(block_size=2)(skip_x)
# concat
# [b,16,16,1024], [b,16,16,256],=> [b,16,16,1280]
x = tf.concat([skip_x, x], axis=-1)
# Layer 22
x = layers.Conv2D(1024, (3, 3), strides=(1, 1), padding='same', name='conv_22', use_bias=False)(x)
x = layers.BatchNormalization(name='norm_22')(x)
x = layers.LeakyReLU(alpha=0.1)(x)
x = layers.Dropout(0.5)(x) # add dropout
# [b,16,16,5,7] => [b,16,16,35]
x = layers.Conv2D(5 * 7, (1, 1), strides=(1, 1), padding='same', name='conv_23')(x)
output = layers.Reshape((GRIDSZ, GRIDSZ, 5, 7))(x)
# create model
model = tf.keras.models.Model(input_image, output)
x = tf.random.normal((4, 512, 512, 3))
out = model(x)
print('out:', out.shape)
- Initialization
我们讲网络数据加载到网络中作为网络的初始化
# %%
# 3.2
class WeightReader:
def __init__(self, weight_file):
self.offset = 4
self.all_weights = np.fromfile(weight_file, dtype='float32')
def read_bytes(self, size):
self.offset = self.offset + size
return self.all_weights[self.offset - size:self.offset]
def reset(self):
self.offset = 4
weight_reader = WeightReader('yolo.weights')
weight_reader.reset()
nb_conv = 23
for i in range(1, nb_conv + 1):
conv_layer = model.get_layer('conv_' + str(i))
conv_layer.trainable = True
if i < nb_conv:
norm_layer = model.get_layer('norm_' + str(i))
norm_layer.trainable = True
size = np.prod(norm_layer.get_weights()[0].shape)
beta = weight_reader.read_bytes(size)
gamma = weight_reader.read_bytes(size)
mean = weight_reader.read_bytes(size)
var = weight_reader.read_bytes(size)
weights = norm_layer.set_weights([gamma, beta, mean, var])
if len(conv_layer.get_weights()) > 1:
bias = weight_reader.read_bytes(np.prod(conv_layer.get_weights()[1].shape))
kernel = weight_reader.read_bytes(np.prod(conv_layer.get_weights()[0].shape))
kernel = kernel.reshape(list(reversed(conv_layer.get_weights()[0].shape)))
kernel = kernel.transpose([2, 3, 1, 0])
conv_layer.set_weights([kernel, bias])
else:
kernel = weight_reader.read_bytes(np.prod(conv_layer.get_weights()[0].shape))
kernel = kernel.reshape(list(reversed(conv_layer.get_weights()[0].shape)))
kernel = kernel.transpose([2, 3, 1, 0])
conv_layer.set_weights([kernel])
layer = model.layers[-2] # last convolutional layer
# print(layer.name)
layer.trainable = True
weights = layer.get_weights()
new_kernel = np.random.normal(size=weights[0].shape) / (GRIDSZ * GRIDSZ)
new_bias = np.random.normal(size=weights[1].shape) / (GRIDSZ * GRIDSZ)
layer.set_weights([new_kernel, new_bias])
可视化测试:
# %%
img, detector_mask, matching_gt_boxes, matching_classes_oh, gt_boxes_grid = next(train_gen)
img, detector_mask, matching_gt_boxes, matching_classes_oh, gt_boxes_grid = \
img[0], detector_mask[0], matching_gt_boxes[0], matching_classes_oh[0], gt_boxes_grid[0]
# [b,512,512,3]=>[b,16,16,5,7]=>[16,16,5,x-y-w-h-conf-l1-l2]
y_pred = model(tf.expand_dims(img, axis=0))[0][..., 4]
# [16,16,5] => [16,16]
y_pred = tf.reduce_sum(y_pred, axis=2)
fig, ((ax1, ax2), (ax3, ax4)) = plt.subplots(2, 2)
ax1.imshow(img)
# [16,16,5,1]=>[16,16]
ax2.matshow(tf.reduce_sum(detector_mask, axis=2)[..., 0])
ax3.matshow(y_pred)
损失函数
损失函数算是比较麻烦的一个点,需要计算
- Coordinate loss
- Class loss
- Compute IOU
- Confidence loss
# %%
# calcute iou
def compute_iou(x1, y1, w1, h1, x2, y2, w2, h2):
# x1... : [b,16,16,5]
xmin1 = x1 - 0.5 * w1
xmax1 = x1 + 0.5 * w1
ymin1 = y1 - 0.5 * h1
ymax1 = y1 + 0.5 * h1
xmin2 = x2 - 0.5 * w2
xmax2 = x2 + 0.5 * w2
ymin2 = y2 - 0.5 * h2
ymax2 = y2 + 0.5 * h2
# (xmin1,ymin1,xman1,ymax1) (xmin2,ymin2,xmax2,ymax2
interw = np.minimum(xmax1, xmax2) - np.maximum(xmin1, xmin2)
interh = np.minimum(ymax1, ymax2) - np.maximum(ymin1, ymin2)
inter = interw * interh
union = w1 * h1 + w2 * h2 - inter
iou = inter / (union + 1e-6)
# [b,16,16,5]
return iou
# %%
# coordinate loss
from tensorflow.keras import losses
def yolo_loss(detector_mask, matching_gt_boxes, matching_classes_oh, gt_boxes_grid, y_pred):
# detector_mask: [b,16,16,5,1]
# matching_gt_boxes: [b,16,16,5,5] x-y-w-h-l
# matching_classes_oh: [b,16,16,5,2] l1-l2
# gt_boxes_grid: [b,40,5] x-y-wh-l
# y_pred: [b,16,16,5,7] x-y-w-h-conf-l0-l1
anchors = np.array(ANCHORS).reshape(5, 2)
# create starting position for each grid anchors
# [16,16]
x_grid = tf.tile(tf.range(GRIDSZ), [GRIDSZ])
# [1,16,16,1,1]
# [b,16,16,5,2]
x_grid = tf.reshape(x_grid, (1, GRIDSZ, GRIDSZ, 1, 1))
x_grid = tf.cast(x_grid, tf.float32)
# [b,16_1,16_2,1,1]=>[b,16_2,16_1,1,1]
y_grid = tf.transpose(x_grid, (0, 2, 1, 3, 4))
xy_grid = tf.concat([x_grid, y_grid], axis=-1)
# [1,16,16,1,2]=> [b,16,16,5,2]
xy_grid = tf.tile(xy_grid, [y_pred.shape[0], 1, 1, 5, 1])
# [b,16,16,5,7] x-y-w-h-conf-l1-l2
pred_xy = tf.sigmoid(y_pred[..., 0:2])
pred_xy = pred_xy + xy_grid
# [b,16,16,5,2]
pred_wh = tf.exp(y_pred[..., 2:4])
# [b,16,16,5,2] * [5,2] => [b,16,16,5,2]
pred_wh = pred_wh * anchors
n_detector_mask = tf.reduce_sum(tf.cast(detector_mask > 0., tf.float32))
# [b,16,16,5,1] * [b,16,16,5,2]
#
xy_loss = detector_mask * tf.square(matching_gt_boxes[..., :2] - pred_xy) / (n_detector_mask + 1e-6)
xy_loss = tf.reduce_sum(xy_loss)
wh_loss = detector_mask * tf.square(tf.sqrt(matching_gt_boxes[..., 2:4]) - \
tf.sqrt(pred_wh)) / (n_detector_mask + 1e-6)
wh_loss = tf.reduce_sum(wh_loss)
# 4.1 coordinate loss
coord_loss = xy_loss + wh_loss
# 4.2 class loss
# [b,16,16,5,2]
pred_box_class = y_pred[..., 5:]
# [b,16,16,5]
true_box_class = tf.argmax(matching_classes_oh, -1)
# [b,16,16,5] vs [b,16,16,5,2]
class_loss = losses.sparse_categorical_crossentropy( \
true_box_class, pred_box_class, from_logits=True)
# [b,16,16,5] => [b,16,16,5,1]* [b,16,16,5,1]
class_loss = tf.expand_dims(class_loss, -1) * detector_mask
class_loss = tf.reduce_sum(class_loss) / (n_detector_mask + 1e-6)
# 4.3 object loss
# nonobject_mask
# iou done!
# [b,16,16,5]
x1, y1, w1, h1 = matching_gt_boxes[..., 0], matching_gt_boxes[..., 1], \
matching_gt_boxes[..., 2], matching_gt_boxes[..., 3]
# [b,16,16,5]
x2, y2, w2, h2 = pred_xy[..., 0], pred_xy[..., 1], pred_wh[..., 0], pred_wh[..., 1]
ious = compute_iou(x1, y1, w1, h1, x2, y2, w2, h2)
# [b,16,16,5,1]
ious = tf.expand_dims(ious, axis=-1)
# [b,16,16,5,1]
pred_conf = tf.sigmoid(y_pred[..., 4:5])
# [b,16,16,5,2] => [b,16,16,5, 1, 2]
pred_xy = tf.expand_dims(pred_xy, axis=4)
# [b,16,16,5,2] => [b,16,16,5, 1, 2]
pred_wh = tf.expand_dims(pred_wh, axis=4)
pred_wh_half = pred_wh / 2.
pred_xymin = pred_xy - pred_wh_half
pred_xymax = pred_xy + pred_wh_half
# [b, 40, 5] => [b, 1, 1, 1, 40, 5]
true_boxes_grid = tf.reshape(gt_boxes_grid, \
[gt_boxes_grid.shape[0], 1, 1, 1, gt_boxes_grid.shape[1], gt_boxes_grid.shape[2]])
true_xy = true_boxes_grid[..., 0:2]
true_wh = true_boxes_grid[..., 2:4]
true_wh_half = true_wh / 2.
true_xymin = true_xy - true_wh_half
true_xymax = true_xy + true_wh_half
# predxymin, predxymax, true_xymin, true_xymax
# [b,16,16,5,1,2] vs [b,1,1,1,40,2]=> [b,16,16,5,40,2]
intersectxymin = tf.maximum(pred_xymin, true_xymin)
# [b,16,16,5,1,2] vs [b,1,1,1,40,2]=> [b,16,16,5,40,2]
intersectxymax = tf.minimum(pred_xymax, true_xymax)
# [b,16,16,5,40,2]
intersect_wh = tf.maximum(intersectxymax - intersectxymin, 0.)
# [b,16,16,5,40] * [b,16,16,5,40]=>[b,16,16,5,40]
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
# [b,16,16,5,1]
pred_area = pred_wh[..., 0] * pred_wh[..., 1]
# [b,1,1,1,40]
true_area = true_wh[..., 0] * true_wh[..., 1]
# [b,16,16,5,1]+[b,1,1,1,40]-[b,16,16,5,40]=>[b,16,16,5,40]
union_area = pred_area + true_area - intersect_area
# [b,16,16,5,40]
iou_score = intersect_area / union_area
# [b,16,16,5]
best_iou = tf.reduce_max(iou_score, axis=4)
# [b,16,16,5,1]
best_iou = tf.expand_dims(best_iou, axis=-1)
nonobj_detection = tf.cast(best_iou < 0.6, tf.float32)
nonobj_mask = nonobj_detection * (1 - detector_mask)
# nonobj counter
n_nonobj = tf.reduce_sum(tf.cast(nonobj_mask > 0., tf.float32))
nonobj_loss = tf.reduce_sum(nonobj_mask * tf.square(-pred_conf)) \
/ (n_nonobj + 1e-6)
obj_loss = tf.reduce_sum(detector_mask * tf.square(ious - pred_conf)) \
/ (n_detector_mask + 1e-6)
loss = coord_loss + class_loss + nonobj_loss + 5 * obj_loss
return loss, [nonobj_loss + 5 * obj_loss, class_loss, coord_loss]
训练
训练其实就没啥了,前面的代码已经做出了准备
# %%
img, detector_mask, matching_gt_boxes, matching_classes_oh, gt_boxes_grid = next(train_gen)
img, detector_mask, matching_gt_boxes, matching_classes_oh, gt_boxes_grid = \
img[0], detector_mask[0], matching_gt_boxes[0], matching_classes_oh[0], gt_boxes_grid[0]
y_pred = model(tf.expand_dims(img, axis=0))[0]
loss, sub_loss = yolo_loss(tf.expand_dims(detector_mask, axis=0),
tf.expand_dims(matching_gt_boxes, axis=0),
tf.expand_dims(matching_classes_oh, axis=0),
tf.expand_dims(gt_boxes_grid, axis=0),
tf.expand_dims(y_pred, axis=0))
# %%
# train
val_db = get_dataset('/data/val/image', 'data/val/annotation', 4)
val_gen = ground_truth_generator(val_db)
def train(epoches):
optimizer = keras.optimizers.Adam(learning_rate=1e-4, beta_1=0.9,
beta_2=0.999, epsilon=1e-08)
for epoch in range(epoches):
for step in range(30):
img, detector_mask, matching_true_boxes, matching_classes_oh, true_boxes = next(train_gen)
with tf.GradientTape() as tape:
y_pred = model(img, training=True)
loss, sub_loss = yolo_loss(detector_mask, \
matching_true_boxes, matching_classes_oh, \
true_boxes, y_pred)
grads = tape.gradient(loss, model.trainable_variables)
optimizer.apply_gradients(zip(grads, model.trainable_variables))
print(epoch, step, float(loss),float(sub_loss[0]),float(sub_loss[1]),float(sub_loss[2]))
# %%
train(10)
model.save_weights('epoch10.ckpt')
# %%
链接:https://pan.baidu.com/s/1jZkygfa5jhdZSMKWCEyp-Q
提取码:0fug
参考书籍: TensorFlow 深度学习 — 龙龙老师
