
import torch.nn as nn
import torch
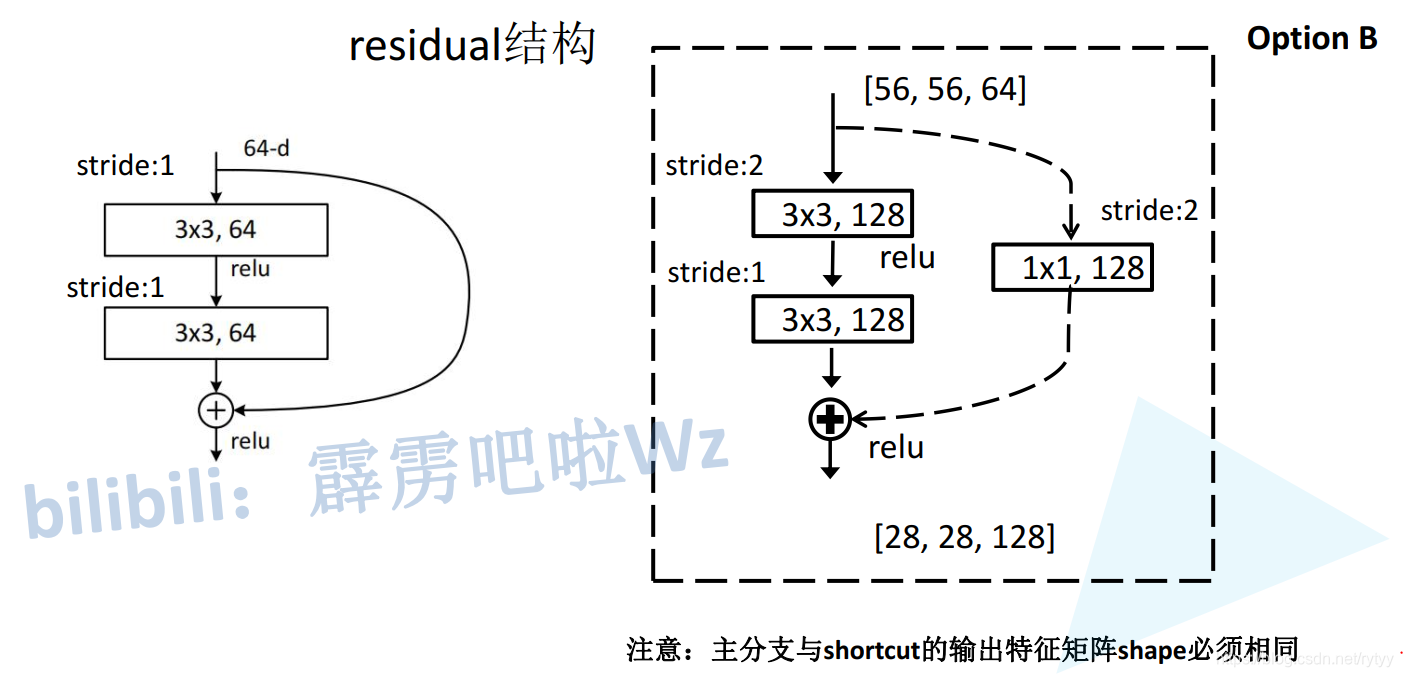
# 定义应用于18和34层等浅层resnet的残差块
class BasicBlock(nn.Module):
expansion = 1 # 该参数决定了每一个残差块的最后层卷积的通道数是前边层的多少倍
def __init__(self, in_channel, out_channel, stride=1, dowmsample=None):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channel=in_channel, out_channel=out_channel,
kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2d(in_channel=out_channel, out_channel=out_channel,
kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 == nn.BatchNorm2d(out_channel)
self.dowmsample = dowmsample
def forward(self, x):
identity = x
# 如果残差块的输入输出的通道数不同,那么则需要在直连的地方用1*1卷积下采样一次,
if self.dowmsample is not None:
identity = self.dowmsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out += identity
out = self.relu(out)
return out
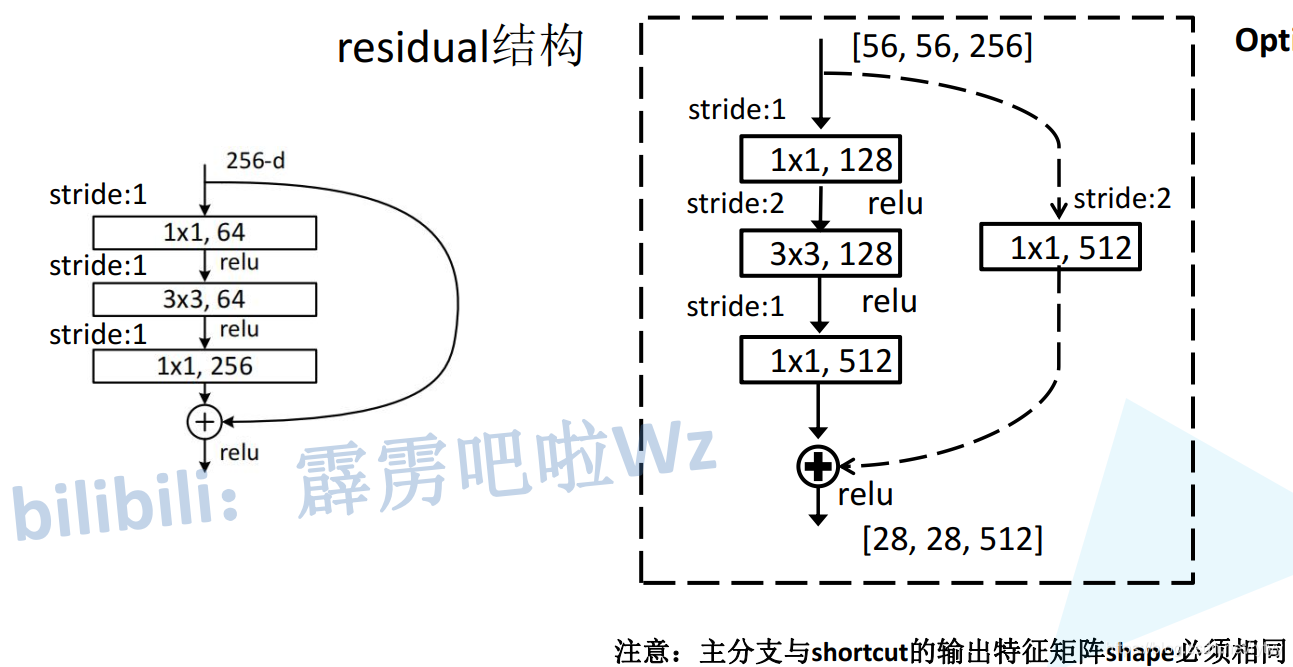
# 定义应用于50,101,152等深层resnet的残差块,由1*1,3*3,1*1的卷积堆叠而成
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, in_channel, out_channel, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=out_channel,
kernel_size=1, stride=1, bias=False) # 降维
self.bn1 = nn.BatchNorm2d(out_channel)
self.conv2 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel,
kernel_size=3, stride=stride, bias=False, padding=1)
self.bn2 = nn.BatchNorm2d(out_channel)
self.conv3 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel * self.expansion,
kernel_size=1, stride=1, bias=False) # 升高维度
self.bn3 = nn.BatchNorm2d(out_channel * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
def forward(self, x):
identity = x
if self.downsample is not None:
identity = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.relu(out)
return out
# 将残差组合起来定义ResNet网络结构
class ResNet(nn.Module):
# 初始化参数里,block表示使用哪种残差块,block_num为一个列表,表示每个layer里各有多少个残差块
def __init__(self, block, block_num, num_classes=1000, include_top=True):
super(ResNet, self).__init__()
self.include_top = include_top
self.in_channel = 64
self.conv1 = nn.Conv2d(3, self.in_channel, kernel_size=7, stride=2,
padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(self.in_channel)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, block_num[0])
self.layer2 = self._make_layer(block, 128, block_num[1], stride=2)
self.layer3 = self._make_layer(block, 256, block_num[2], stride=2)
self.layer4 = self._make_layer(block, 512, block_num[3], stride=2)
if self.include_top:
self.avgpool = nn.AdaptiveAvgPool2d((1, 1)) # output size = (1, 1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
# 对卷积层进行权重初始化
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
def _make_layer(self, block, channel, block_num, stride=1):
downsample = None
if stride != 1 or self.in_channel != channel * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.in_channel, channel * block.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(channel * block.expansion))
layers = []
layers.append(block(self.in_channel, channel, downsample=downsample,
stride=stride))
self.in_channel = channel * block.expansion
for _ in range(1,block_num):
layers.append(block(self.in_channel,channel))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
if self.include_top:
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x
def resnet34(num_classes=1000, include_top=True):
return ResNet(BasicBlock, [3, 4, 6, 3], num_classes=num_classes, include_top=include_top)
def resnet101(num_classes=1000, include_top=True):
return ResNet(Bottleneck, [3, 4, 23, 3], num_classes=num_classes, include_top=include_top)
