建议先阅读<上一篇>
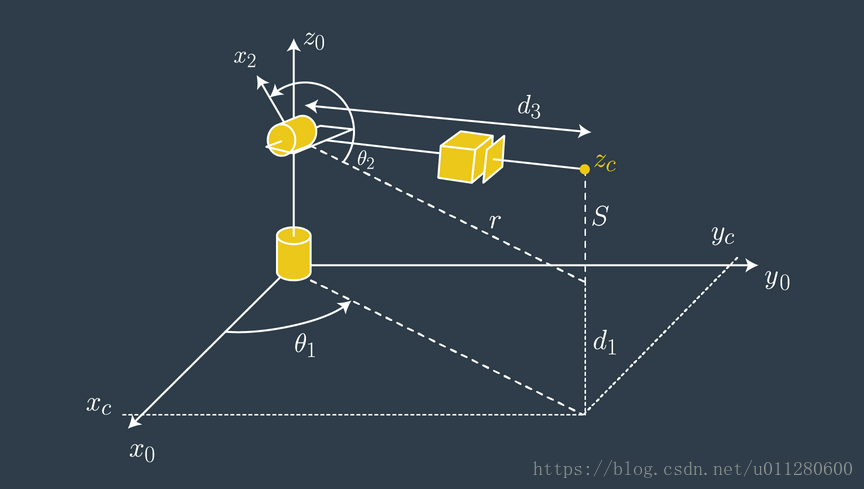
为了让您更深入地了解解决方案过程,特别是前三个变量,我们提供了一个RRP机械手的示例。
点zc可以被认为是球形手腕的腕部中心。我们将假定zc的笛卡尔坐标已经被计算出来了。为了找到θ1,我们需要将zc投影到地平面上 - 这是一项简单的任务,因为它只需要设置z坐标= 0! 从而, 为了求解θ2,假设θ1= 0,并将连杆2和3投影到x-z平面上。 再次,我们使用atan2函数,
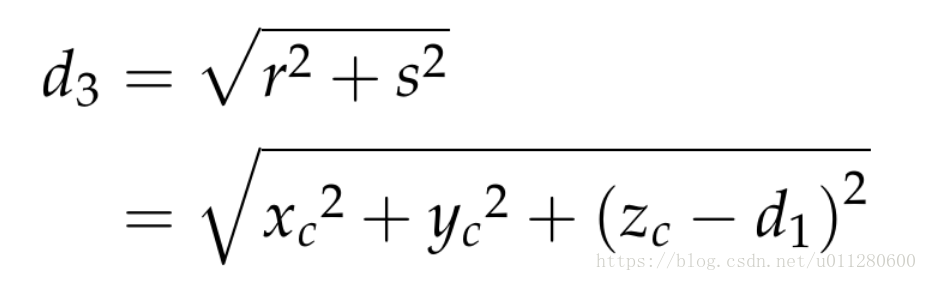
这里: 并且: 最后一个关节变量d3代表了移动关节的长度。 从图中可以明显看出,d3是具有“r”和“s”边的直角三角形的斜边。 求解d3:
就是这样! 前三个变量现在以闭合形式明确描述。
<上一篇>