这里所介绍的二分图匹配算办法又称之为匈牙利算法,而至于为什么被称为匈牙利算法,其原因只有一个,因为他是由一个匈牙利数学家Edmonds在1965年提出的一种算法。
>匈牙利算法是基于Hall算法中充分性证明的思想,是二分图匹配的最常见的算法,其算法的核心就是寻找增广路径,是一种用增广路求二分图最大匹配的算法。
——摘自《度娘百科》
首先我们来建立一个初步的认识:
1、什么叫做二分图呢??
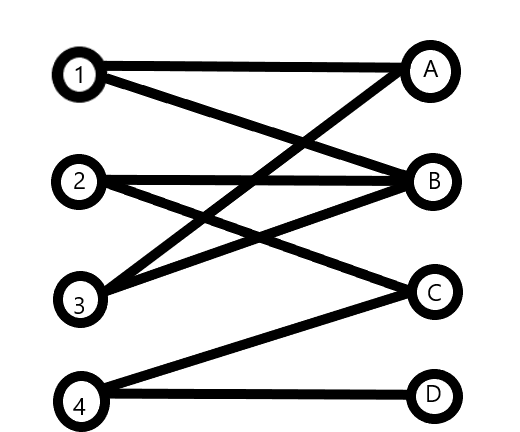
顾名思义,二分图就是被分成两块的图,是图论中的一种特殊模型。比如下图

我们暂且将这个图称为G=(Yeasion,Nein),这表示这个图被分为了两个集合,一个是左边的四个点,1,2,3,4属于Yeasion集合,而右面的A,B,C,D属于Nein集合。由于整张图被Yeasion和Nein两个集合给分取了,于是便叫做了二分图。
这就是一个还没有连边的二分图。而关于二分图的连边有一个特殊的性质:同集合内不能进行连线。换句话说,就是只能进行相异集合内元素的连接。
比如这么连:
就是一种连法。
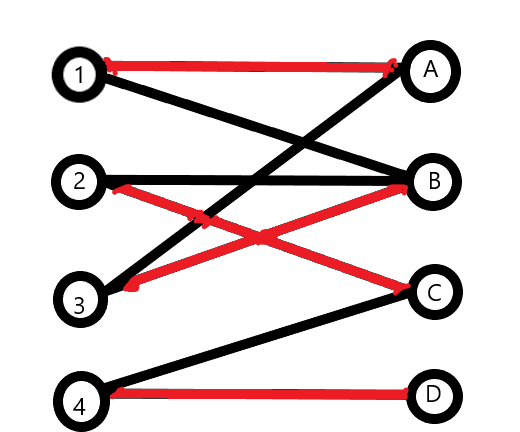
那么什么叫做匹配呢??就是我们选取这几条边的其中几条,保证任意两条边都没有公共端点,比如选取(2,B)和(3,B)就不行,因为这两条边有一个公共端点B。比如下图就是该图的一个匹配。
 (图丑见谅。。。。。qnq)
(图丑见谅。。。。。qnq)
我们在这里面可以很容易的发现,你无法再找出一个匹配方法的符合法则的边的数量超过这个图。因为一共有八个点,我们最多找到四条边。此时,这个图的匹配方法就被称为该二分图G的最大匹配。
以上介绍了两个基本概念:匹配与最大匹配。
接下来再介绍几个定义:
1.完全匹配。
就是某些文章中所说的完备匹配,就是要让所有的点都有连边。就是每一个端点都被匹配。以上这个图中是有最大匹配的,但是不一定每一个二分图中都有。所以要依情况而定。一个很浅显的道理:二分图完全匹配中的边数=端点数/2。
2.最优匹配。
这听起来好像和最大匹配并没有什么区别,但是要注意:最有匹配是带权的匹配,不一定要使得连的边数最多,但是要使你连的所有边的权值最大。
并且最优匹配也是一个完全匹配。注意一个点:当两个集合的元素个数不相等的时候,可以通过补上点,并添加权值为0的边。
3.最小覆盖
分为最小顶点覆盖和最小路径覆盖。
最小顶点覆盖,是指的用最少的顶点数使每一条边都至少与其中的一个点关联,二分图的最小顶点覆盖数=二分图最大匹配数。
最小路径覆盖,就是用尽量少的边(不相交的简单路径)覆盖二分图里面的所有顶点。二分图的最小路径覆盖数=二分图的顶点数-二分图最大匹配数。
4.最大独立集
就是寻找一个点最多的集合,是的这个集合中的任意两个点在图中都没有边相连。二分图的最大独立集=二分图最小路径覆盖数。
So,正式开始我们的匈牙利算法。
首先,我们建立一个图,来做一个匈牙利算法的模拟流程。
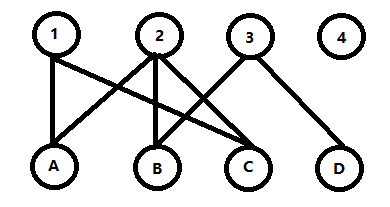
那么我们现在知道了集合Yeasion是有{1,2,3,4},Nein是有{A,B,C,D}。
然后题目就是让我们输出这个图的最大匹配数,我们首先记一个ans用以记录最大匹配数。
首先从A开始,我们发现有{A,1},和{A,2},我们先取第一个,然后就匹配上了{A,1}.
然后继续进行,我们循环到发现了B,然后发现B有{B,2}和{B,3}两个边,所以我们仍然先匹配{B,1}.

然后我们继续进行便利,发现C一共有两个相连的边,分别为{C,1}和{C,2},按照我们的规则,取第一个匹配。
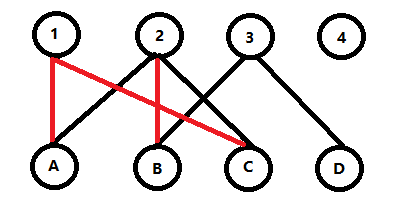
但是我们发现,他违背了第一个法则:二分图中没有任何一条边有公共的端点。而我们如果这样进行匹配,{A,1}和{C,1}就有了公共端点1.
于是我们在这里进行回溯操作。
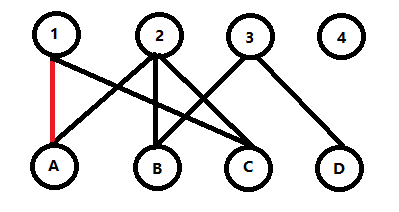
我们由C找到1,然后发现1已经连上了A,于是破坏掉{A,1}的匹配,加上{C,1}的匹配,然后回溯到A。
既然1已经被后来居上的C给无耻占领了,然后我们继续对A进行搜索,发现A还有{A,2}这条边,于是我们再次连上这条边。
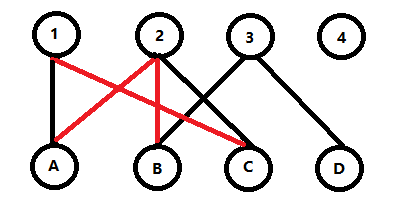
但是我们再次发现,{A,2}和{B,2}又再次冲突了,于是我们再次执行回溯操作。
我们由A找到2,然后发现2已经连上了B,于是破坏掉{B,2}的匹配,加上{A,2}的匹配,然后回溯到B。
我们发现B还有一个可连的3,于是我们连接上{B,3}.
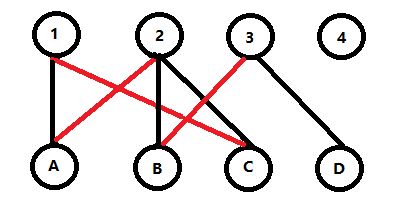
然后我们接着遍历,到了D,发现,我们用上面的遍历方法,无法使得D再次有边。那么遍历就此结束。
那么上面就是基本的匈牙利算法流程。