
舵机,是指在自动驾驶仪中操纵飞机舵面(操纵面)转动的一种执行部件。分有:
①电动舵机,由电动机、传动部件和离合器组成。接受自动驾驶仪的指令信号而工作,当人工驾驶飞机时,由于离合器保持脱开而传动部件不发生作用。
②液压舵机,由液压作动器和旁通活门组成。当人工驾驶飞机时,旁通活门打开,由于作动器活塞两边的液压互相连通而不妨害人工操纵。此外,还有电动液压舵机,简称“电液舵机”。
舵机的大小由外舾装按照船级社的规范决定,选型时主要考虑扭矩大小。如何审慎地选择经济且合乎需求的舵机,也是一门不可轻忽的学问。
[百度百科]
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。在高档遥控玩具,如飞机、潜艇模型,遥控机器人中已经得到了普遍应用。
舵机是船舶上的一种大甲板机械。舵机的大小由外舾装按照船级社的规范决定,选型时主要考虑扭矩大小。
在航天方面,舵机应用广泛。航天方面,导弹姿态变换的俯仰、偏航、滚转运动都是靠舵机相互配合完成的。舵机在许多工程上都有应用,不仅限于船舶。
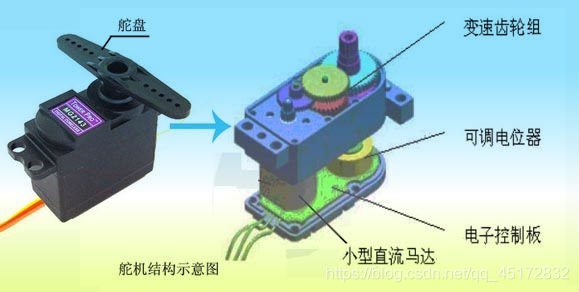
结构
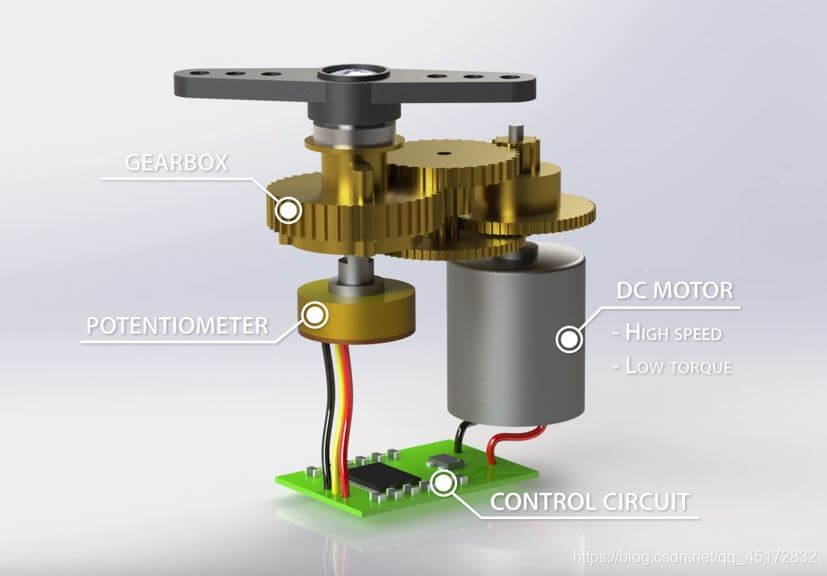
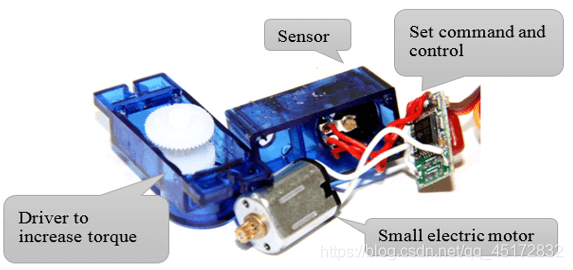
舵机在机器人技术中非常有用。如上图所示,这些马达体积很小,它们内置了控制电路。标准舵机系统,如Futaba S-148有42盎司/英寸的扭矩(相当于1.2千克的扭矩), 对于它的体积来说,已经非常强大了 。它还可以根据负载的变化调整功率。因此,负载较轻的舵机系统不会消耗太多的能量。舵机的内部结构如上图所示。你可以看到控制电路,马达,一组齿轮,还有外壳。你还可以看到连接外部的3根连线。
伺服电机的比例控制
那么,舵机是如何工作的呢?舵机有一些控制电路和一个电位器(一个可变电阻),连接到输出轴。在上面的图片中,可以看到可变电阻在电路板的左边,三根红线连接处。可变电阻允许控制电路监控伺服电机的电流角度。如果轴的角度正确,则电机关闭。如果电路发现角度不正确,将电机转到正确的方向,直到角度正确。伺服系统的输出轴可以移动180度左右 。
如何控制伺服电机的角度?
如何控制伺服电机转向的角度呢?控制线用来传达角度信号。角度是由施加在控制导线上的脉冲的持续时间决定的。这叫做脉冲编码调制。伺服系统期望每20毫秒看到一个脉冲(.02秒)。脉冲的长度将决定电机转多远距离。
例如,1.5毫秒的脉冲将使电机转到90度位置(通常称为中性位置)。如果脉冲小于1.5 ms,则电机将轴向接近0度。如果脉冲大于1.5ms,则轴向180度方向旋转。
详细可查阅:舵机角度的控制原理
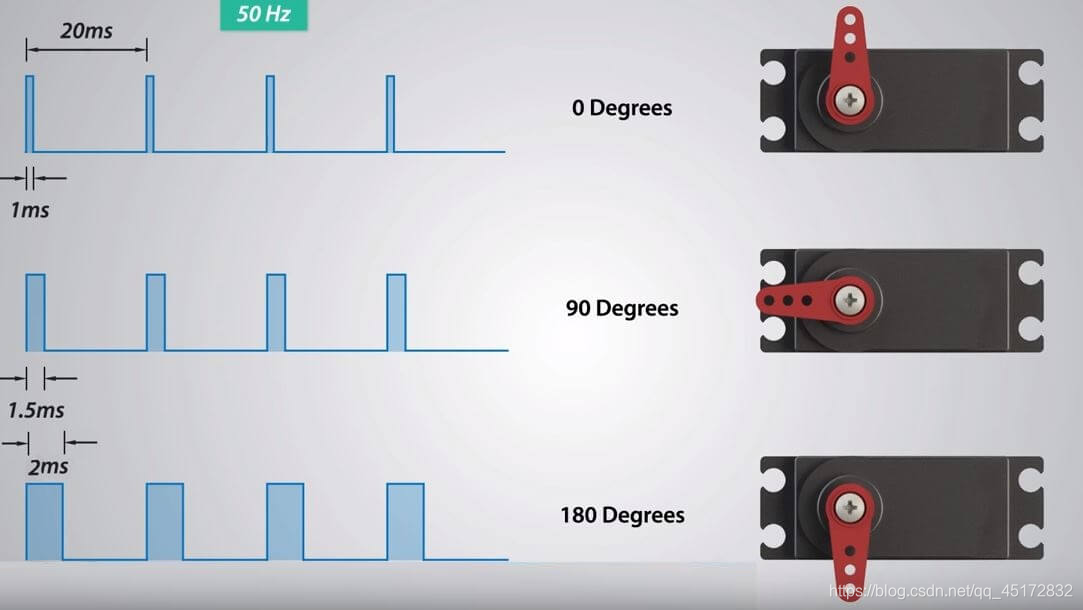
如上图所示,脉冲的持续时间决定了输出轴的角度。注意这里的时间是说明性的,实际的时间取决于电机制造商。然而,原理是一样的。
stm32驱动舵机程序
stm32舵机驱动源程序如下:
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "timer.h"
u16 led0pwmval;
int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TIM2_PWM_Init(1999,719); //100Khz的计数频率,计数到2000为20ms
while(1)
{
LED1=0;
TIM_SetCompare3(TIM2,50);
delay_ms(5000); //延时多久很重要,自己一点点试。
//延时多久很重要,自己一点点试。
}
}
main函数程序
#include "timer.h"
#include "led.h"
#include "usart.h"
//V1.1 20120904
//1,增加TIM3_PWM_Init函数。
//2,增加LED0_PWM_VAL宏定义,控制TIM3_CH2脉宽
//////////////////////////////////////////////////////////////////////////////////
//通用定时器3中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3!
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
}
//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
LED1=!LED1;
}
}
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM2_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
//GPIO_PinRemapConfig(GPIO_PartialRemap_TIM2, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC3Init(TIM2, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM2, ENABLE); //使能TIM3
}
32代码引自>>单片机论坛»论坛›电子技术分类讨论区›资料共享›stm32舵机驱动例程http://www.51hei.com/bbs/dpj-150290-1.html
arduino驱动舵机程序
#include <Servo.h>
Servo myservo; // 定义Servo对象来控制
int pos = 0; // 角度存储变量
void setup() {
myservo.attach(9); // 控制线连接数字9
}
void loop() {
for (pos = 0; pos <= 180; pos ++) { // 0°到180°
// in steps of 1 degree
myservo.write(pos); // 舵机角度写入
delay(10); // 等待转动到指定角度
}
for (pos = 180; pos >= 0; pos --) { // 从180°到0°
myservo.write(pos); // 舵机角度写入
delay(10); // 等待转动到指定角度
}
}
