第六章 数字基带传输系统
6.1 基本概念
如上篇博文一样,下面的这些基本概念也要理解并记住。
- 数字基带信号:未经调制的数字信号
- 数字基带传输系统 -不经载波调制而直接传输数字基带信号的系统,常用于传输距离不太远的情况下。
- 数字带通传输系统 -包括调制和解调过程的传输系统
- 数字基带信号波形,基本的几种如下:
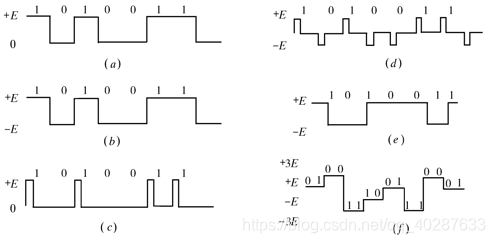
- 单极性波形
如上图的图(a)和(c) - 双极性波形
如上图的图(b)(d)(e) - 单极性归零(RZ)
如上图的图(c),图(a)不是RZ,属于非归零波形(NRZ) - 双极性归零
如上图的图(d) - 差分波形
用相邻码元电平的跳变和不变来表示消息代码 - 多电平波形
如上图的图(f)
6.2 基带传输的常用码型
6.2.1 传输码的码型选择原则
- 不含直流(直流不含信息),且低频分量尽量少;
- 应含有丰富的定时信息,以便于从接收码流中提取定时信号;
- 功率谱主瓣宽度窄,以节省传输频带;
- 不受信息源统计特性的影响,即能适应于信息源的变化;
- 具有内在的检错能力,即码型应具有一定规律性,以便利用这一规律性进行宏观监测。
- 编译码简单,以降低通信延时和成本。
AMI码:传号交替反转码 - 消息码: 0 1 1 0 0 0 0 0 0 0 1 1 0 0 1 1 …
- AMI码: 0 -1 +1 0 0 0 0 0 0 0 –1 +1 0 0 –1 +1…
- 缺点:当原信码出现长连“0”串时,信号的电平长时间不跳变,造成提取定时信号的困难。解决连“0”码问题的有效方法之一是采用HDB码。
HDB3码:3阶高密度双极性码 - 编码规则:
(1)检查AMI码,每4个连“0”化记为B00V,称为破坏节,其中V称为破坏脉冲,而B称为调节脉冲;
(2)V与前一非“0”脉冲的极性相同,且所有V极性交替
(3)B的取值可选0、+1或-1,以使V满足(2)中要求
(4)V码后面的传号码极性随V码交替。 - 译码:V、B都要改为0
(1)V与前面的非零码同极性
(2)B与后面的非零码同极性,且中间0的个数为2个 - 消息码: 1 0 0 0 0 1 0 0 0 0 1 1 0 0 0 0 0 0 0 0 l 1
- AMI码: -1 0 0 0 0 +1 0 0 0 0 -1 +1 0 0 0 0 0 0 0 0 -1 +1
- HDB码: -1 0 0 0 –V +1 0 0 0 +V -1 +1-B 0 0 –V +B 0 0 +V -l +1
**双相码(曼彻斯特码) **- 消息码: 1 1 0 0 1 0 1
-
双相码: 10 10 01 01 10 01 10
CMI码(传号反转码)
- 编码规则:“1”码交替用“1 1”和“0 0”两位码表示;“0”码固定地用“01”表示。
即要用两个波形去传递信号,当在同一时刻为“01"时,说明传递的码元为”0“ - CMI码易于实现,含有丰富的定时信息。此外,由于10为禁用码组,不会出现3个以上的连码,这个规律可用来宏观检错。
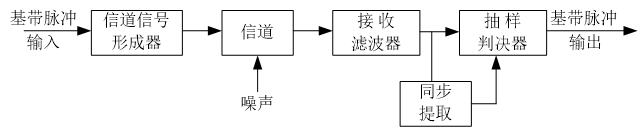
6.3 数字基带信号传输
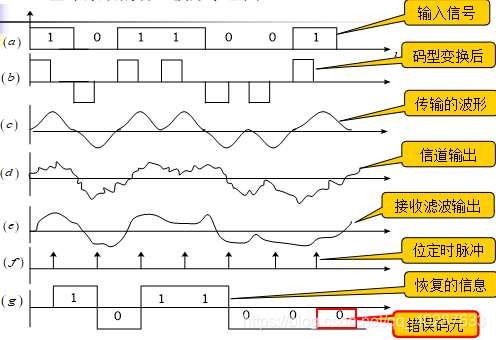
- 产生误码的原因:码间串扰,信道的加性噪声干扰
- 无码间串扰的条件
时域:
频域:
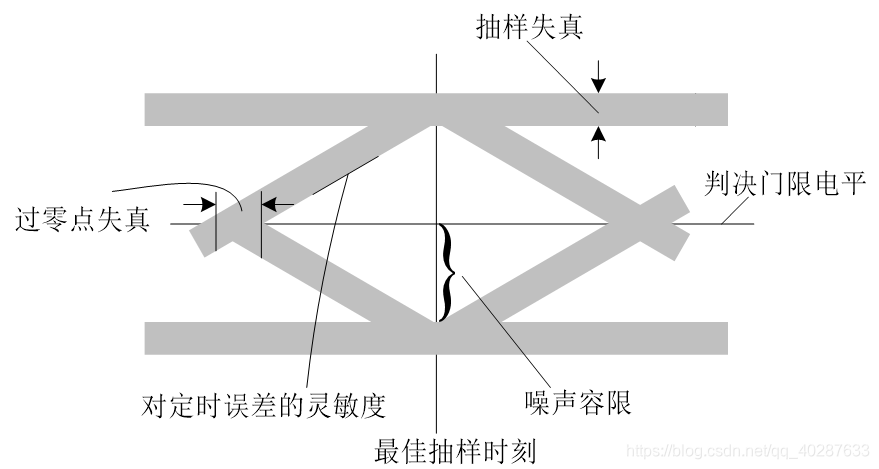
6.3 眼图
- 眼图是指通过用示波器观察接收端的基带信号波形,从而估计和调整系统性能的一种方法。
- 眼图的“眼睛”张开的越大,且眼图越端正,表示码间串扰越小;反之,表示码间串扰越大。
6.4 部分响应和时域平衡
6.4.1 部分响应系统
- 原因:h(kTs)=0, k 0,即:任何位置都没干扰
- 变通:人为地在某些码元处引入码间串扰,在接收端加以消除
- 目的:使频带利用率提高到理论最大值2、
加速传输波形尾巴的衰减(降低对定时精度要求) - 通常把这种波形叫部分响应波形。
- 利用部分响应波形传输的基带系统称为部分响应系统。
- 但经过部分响应系统会产生码元的差错传播,解决途径:预编码—相关编码—模2判决
6.4.2 时域均衡
- 在接收滤波器和抽样判决器之间插入一个称之为横向滤波器的可调滤波器,时域均衡可以根据信道特性的变化进行调整,能够有效地减小码间串扰,故在数字传输系统中,尤其是高速数据传输中得以广泛应用。
- 在产生的失真中,有两个失真定义:
峰值失真:
均方失真:
-伴随着上述两个失真定义,存在两个准则:
最小峰值失真准则,最小均方失真准则。
