目录
摘要
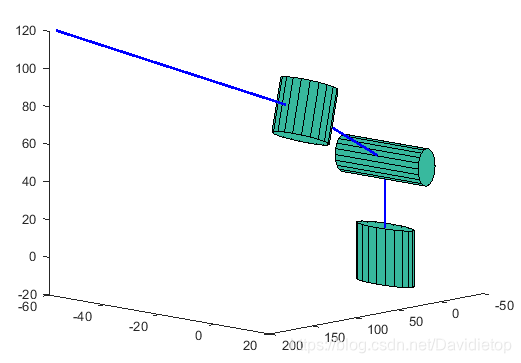
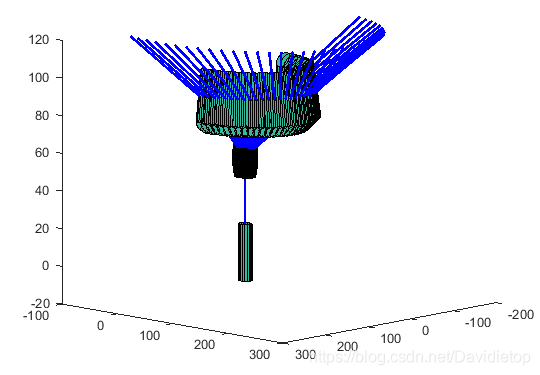
最近小虎在课程设计上用到了机器人学正运动学的仿真学习,利用D-H参数法求解正运动学问题。在利用MATLAB仿真中,通过设置不同的D-H参数以及位置的数量,可以实现多关节不同的位姿位置变换。另外,通过参数连续化,可以近似拟合出动态的运动。
结果
静态的四位置图:
动态仿真图:
代码分析
代码部分分为了6个程序,分别是设置初始参数、D-H求解、D-H参数绘图、3D圆柱关节绘制、3D杆件绘制、移动主程序。代码分析无删减。
D-H参数表
| objects | ||||
|---|---|---|---|---|
| 1 | 0 | 50 | ||
| 2 | 100 | 0 | ||
| 3 | 120 | 0 |

比如关节2到3的变换可以就简化为:

在这里的实际例子是:
Build_3DOFRobot.m
参数设置,D-H参数表。
有些变换要进行角度弧度的转变,因此设有ToDeg和ToRad。
ToDeg = 180/pi;
ToRad = pi/180;
UZ = [0 0 1]';
构建结构变量,以便设置D-H参数表, 在调用DH求解时候设置,这里暂且设置为零。
Link= struct('name','Body' , 'th', 0, 'dz', 0, 'dx', 0, 'alf',90*ToRad,'az',UZ);
Link(1)= struct('name','Base' , 'th', 0*ToRad, 'dz', 0, 'dx', 0, 'alf',0*ToRad,'az',UZ);
Link(2) = struct('name','J1' , 'th', 0*ToRad, 'dz', 50, 'dx', 0, 'alf',90*ToRad,'az',UZ);
Link(3) = struct('name','J2' , 'th', 0*ToRad, 'dz', 0, 'dx', 100, 'alf',90*ToRad,'az',UZ);
Link(4) = struct('name','J3' , 'th', 0*ToRad, 'dz', 0, 'dx', 120, 'alf',0*ToRad,'az',UZ);
DHfk3Dof.m
D-H参数绘图。
调用D-H参数表,设置绘图尺寸(关节圆柱),将角度代入。
function DHfk3Dof(th1,th2,th3,fcla)
global Link;
Build_3DOFRobot;
radius = 10;
len= 30;
joint_col = 0;
plot3(0,0,0,'ro');
Link(2).th=th1*pi/180;
Link(3).th=th2*pi/180;
Link(4).th=th3*pi/180;
求解D-H参数矩阵。
for i=1:4
DH_Matrix(i);
end
绘图。
for i=2:4
Link(i).A=Link(i-1).A*Link(i).A;
Link(i).p= Link(i).A(:,4);
Link(i).n= Link(i).A(:,1);
Link(i).o= Link(i).A(:,2);
Link(i).a= Link(i).A(:,3);
Link(i).R=[Link(i).n(1:3),Link(i).o(1:3),Link(i).a(1:3)];
Connect3D(Link(i-1).p,Link(i).p,'b',2); hold on;
DrawCylinder(Link(i-1).p, Link(i-1).R * Link(i).az, radius,len, joint_col);
hold on;
end
DH_Matrix.m
D-H矩阵求解。
function DH_Matrix(i)
global Link
C=cos(Link(i).th);
S=sin(Link(i).th);
Ca=cos(Link(i).alf);
Sa=sin(Link(i).alf);
a=Link(i).dx;
d=Link(i).dz;
Link(i).n=[C,S,0,0]';
Link(i).o=[-1*S*Ca,C*Ca,Sa,0]';
Link(i).a=[S*Sa, -1*C*Sa,Ca,0]';
Link(i).p=[a*C,a*S,d,1]';
Link(i).R=[Link(i).n(1:3),Link(i).o(1:3),Link(i).a(1:3)];
Link(i).A=[Link(i).n,Link(i).o,Link(i).a,Link(i).p];
DrawCylinder.m
画关节圆柱。
function h = DrawCylinder(pos, az, radius,len, col)
%rotation matrix
az0 = [0;0;1];
ax = cross(az0,az);
ax_n = norm(ax);
if ax_n < eps
rot = eye(3);
else
ax = ax/ax_n;
ay = cross(az,ax);
ay = ay/norm(ay);
rot = [ax ay az];
end
%********** make cylinder
% col = [0 0.5 0]; % cylinder color
a = 20; % number of side faces
theta = (0:a)/a * 2*pi;
x = [radius; radius]* cos(theta);
y = [radius; radius] * sin(theta);
z = [len/2; -len/2] * ones(1,a+1);
cc = col*ones(size(x));
for n=1:size(x,1)
xyz = [x(n,:);y(n,:);z(n,:)];
xyz2 = rot * xyz;
x2(n,:) = xyz2(1,:);
y2(n,:) = xyz2(2,:);
z2(n,:) = xyz2(3,:);
end
%************* draw
% side faces
h = surf(x2+pos(1),y2+pos(2),z2+pos(3),cc);
for n=1:2
patch(x2(n,:)+pos(1),y2(n,:)+pos(2),z2(n,:)+pos(3),cc(n,:));
end
Connect3D.m
画连杆。
function Connect3D(p1,p2,option,pt)
h = plot3([p1(1) p2(1)],[p1(2) p2(2)],[p1(3) p2(3)],option);
set(h,'LineWidth',pt)
end
Mov_3DOF_Rob.m
移动主程序,这里还设了三个 的值。
close all;
th1=0;
th2=20;
th3=30;
DHfk3Dof(th1,th2,th3,0);
view(134,12);
动态分析:
pause;
stp=5;
for i=0:stp:180
DHfk3Dof(th1+i,th2,th3,1);
end
完整代码
其实就在代码分析中。见CSDN资源下载,如果超过20积分,请评论区留下邮箱小虎有空将免费发送。
https://download.csdn.net/download/Davidietop/12313360
