基本流程
1UART 初始化
通过XUartPs_LookupConfig函数,找到UART的基址------------>
通过XUartPs_CfgInitialize函数,初始化UART配置------------>

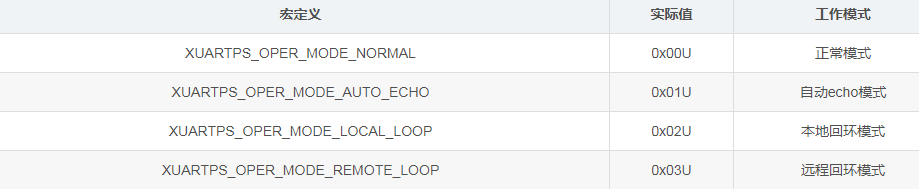
2.模式配置
void XUartPs_SetOperMode(XUartPs *InstancePtr, u8 OperationMode)
用 local loopback为自发自收

3.格式重载配置
使用XUartPs_SetDataFormat函数设置UART的数据格式,包括波特率、数据位数、停止位数和奇偶校验。调用此函数时应确保UART没有收发数据。
cfg里默认使用“8位数据、1位停止、无奇偶校验”,
可以仅使用XUartPs_SetBaudRate函数来设置波特率。
s32 XUartPs_SetBaudRate(XUartPs *InstancePtr, u32 BaudRate)
XUartPs_SetDataFormat
s32 XUartPs_SetDataFormat(XUartPs *InstancePtr, XUartPsFormat * FormatPtr)
typedef struct {
u32 BaudRate; /**< In bps, ie 1200 */
u32 DataBits; /**< Number of data bits */
u32 Parity; /**< Parity */
u8 StopBits; /**< Number of stop bits */
} XUartPsFormat;
4.数据发送
u32 XUartPs_Send(XUartPs *InstancePtr, u8 *BufferPtr, u32 NumBytes)
第二个参数是指向要发送的数据缓冲区的指针;第三个参数是发送的字节数;返回值标识实际发送的字节数。
5.数据接收
u32 XUartPs_Recv(XUartPs *InstancePtr, u8 *BufferPtr, u32 NumBytes)
第二参数指针指向接收到数据要存储的缓冲区;第三个NumBytes是“要”接收的字节数;返回的是实际接收到的字节数。
正是利用了第三个参赛和返回值,实现了接收特定数目数据的功能,
2 轮询模式
初始化
void Uart_init()
{
XUartPs_Config *Config;
Config = XUartPs_LookupConfig(UART_DEVICE_ID);
XUartPs_CfgInitialize(&Uart_PS, Config, Config->BaseAddress);
}
LOCAL_LOOP发收
int Uart_send_receive_LOCAL(XUartPs* Uart_Ps, u8 *SendBuffer, u8 *RecvBuffer, int length)
{
//自收自发
XUartPs_SetOperMode(Uart_Ps,XUARTPS_OPER_MODE_LOCAL_LOOP);
u16 SentCount=0;
u16 RecvCount=0;
SentCount=XUartPs_Send(Uart_Ps,SendBuffer,length);
if (SentCount != length)
return XST_FAILURE;
//发送等待
while(XUartPs_IsSending(Uart_Ps));
//接收
while(RecvCount < length) {
RecvCount += XUartPs_Recv(Uart_Ps, &RecvBuffer[RecvCount],
(length - RecvCount));
}
XUartPs_SetOperMode(Uart_Ps,XUARTPS_OPER_MODE_NORMAL);
for (u16 Index = 0; Index < length; Index++) {
if (SendBuffer[Index] != RecvBuffer[Index]) {
xil_printf("UART Polled Mode failed!\r\n");
return XST_FAILURE;
}
}
xil_printf("UART Polled Mode succeeded!\r\n");
return XST_SUCCESS;
}
main.c
#include "sleep.h"
#include "xparameters.h"
#include "xuartps.h"
#include "xil_printf.h"
#define UART_DEVICE_ID XPAR_XUARTPS_0_DEVICE_ID
#define TEST_BUFFER_SIZE 32
XUartPs Uart_PS; /* Instance of the UART Device */
/*
* The following buffers are used in this example to send and receive data
* with the UART.
*/
static u8 SendBuffer[TEST_BUFFER_SIZE]; /* Buffer for Transmitting Data */
static u8 RecvBuffer[TEST_BUFFER_SIZE]; /* Buffer for Receiving Data */
int main(void)
{
Uart_init();
while(1)
{
sleep(3);
for (u16 Index = 0; Index < TEST_BUFFER_SIZE; Index++) {
SendBuffer[Index] = '0' + Index;
RecvBuffer[Index] = 0;
}
Uart_send_receive_LOCAL(&Uart_PS,SendBuffer,RecvBuffer,TEST_BUFFER_SIZE);
}
return XST_SUCCESS;
}

Normal发收
int Uart_send_receive_Normal(XUartPs* Uart_Ps, u8 *RecvBuffer, int length)
{
//正常模式
XUartPs_SetOperMode(Uart_Ps,XUARTPS_OPER_MODE_NORMAL);
u16 RecvCount=0;
u16 SentCount=0;
//发送等待
while(XUartPs_IsSending(Uart_Ps));
//接收
while(RecvCount < length) {
RecvCount += XUartPs_Recv(Uart_Ps, &RecvBuffer[RecvCount],
(length - RecvCount));
}
SentCount = XUartPs_Send(Uart_Ps, RecvBuffer, length);
if (SentCount != length) {
xil_printf("UART Polled Mode failed!\r\n");
return XST_FAILURE;
}
xil_printf("UART Polled Mode succeeded!\r\n");
return XST_SUCCESS;
}
main.c
int main(void)
{
Uart_init();
while(1)
{
sleep(0.1);
Uart_send_receive_Normal(&Uart_PS,RecvBuffer,TEST_BUFFER_SIZE);
}
return XST_SUCCESS;
}
buffer 长10
只有我们发送够了10个数据后,UART的挂起状态才会结束。
如果我们一次性发送的数据超过了10个,则多余的数据会留在RxFIFO中,直到下一次轮询才被读取。

本文介绍了UART的轮询模式。除非是特别简单的应用,一般不会使用轮询模式。如果要使用轮询模式,一定要有个良好的程序架构或实现机制,避免程序无限挂起。
3 中断模式
uart0 59#
uart0 82#
通过Xil_ExceptionInit函数,避免与前版本有兼容性问题------------>
通过XScuGic_LookupConfig函数,找到通用中断控制器基址------------>
通过XScuGic_CfgInitialize函数,初始化通用中断控制器------------>
通过Xil_ExceptionRegisterHandler函数,使能异常中断处理------------>
通过XScuGic_Connect函数,绑定UART中断处理函数------------>
通过XScuGic_Enable函数,在通用中断控制器中使能UART中断------------>
通过XUartPs_SetInterruptMask函数,设置UART的中断触发方式------------>
通过Xil_ExceptionEnableMask函数,使能中断。
1. 触发方式
使用XUartPs_SetInterruptMask函数设置串口中断的触发方式。第二个参数是设置RxFIFO触发器中断。

XUartPs_SetInterruptMask(Uart_Ps, XUARTPS_IXR_RXOVR);

2.RxFIFO触发等级设置
UART初始化时中使用XUartPs_SetFifoThreshold函数设置RxFIFO的触发等级。RxFIFO中的字节数超过这个值时,会产生一个接收数据中断。不设置的时候默认为8.
void XUartPs_SetFifoThreshold(XUartPs *InstancePtr, u8 TriggerLevel)
第二个参数的取值应在1~64,因为RxFIFO最大只能存储64个字节。
3.中断处理函数
include define
#include "xparameters.h"
#include "xplatform_info.h"
#include "xuartps.h"
#include "xil_exception.h"
#include "xil_printf.h"
#include "xscugic.h"
#include "sleep.h"
#define UART_DEVICE_ID XPAR_XUARTPS_0_DEVICE_ID
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID
#define UART_INT_IRQ_ID XPAR_XUARTPS_1_INTR
#define TEST_BUFFER_SIZE 16
XUartPs Uart_PS ; /* Instance of the UART Device */
XScuGic InterruptController; /* Instance of the Interrupt Controller */
static u8 RecvBuffer[TEST_BUFFER_SIZE]; /* Buffer for Receiving Data */
volatile int TotalReceivedCount;
volatile int TotalSentCount;
u8 *RecvBufferPtr;
uart init
void Uart_init()
{
XUartPs_Config *Config;
Config = XUartPs_LookupConfig(UART_DEVICE_ID);
XUartPs_CfgInitialize(&Uart_PS, Config, Config->BaseAddress);
}
interrupt init connect and enable
void inter_init_connect()
{
XScuGic_Config *IntcConfig; /* Config for interrupt controller */
/* Initialize the interrupt controller driver */
IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);
XScuGic_CfgInitialize(&InterruptController, IntcConfig,
IntcConfig->CpuBaseAddress);
XScuGic_Disable(&InterruptController,59);
XScuGic_SetPriorityTriggerType(&InterruptController,59,16,1);//
//connect and enable
XScuGic_Connect(&InterruptController, 59U,
(Xil_ExceptionHandler) Handler,
&Uart_PS);
XScuGic_Enable(&InterruptController, 59U);
Xil_ExceptionInit();
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,
(Xil_ExceptionHandler) XScuGic_InterruptHandler,
(void *)&InterruptController);
Xil_ExceptionEnable();
}
uart handler
void Handler(void *CallBackRef)
{
u32 ReceivedCount = 0 ;
u32 IsrStatus;
XUartPs *UartInstancePtr = (XUartPs *) CallBackRef ;
IsrStatus = XUartPs_ReadReg(UartInstancePtr->Config.BaseAddress,
XUARTPS_IMR_OFFSET);
IsrStatus &= XUartPs_ReadReg(UartInstancePtr->Config.BaseAddress,
XUARTPS_ISR_OFFSET);//中断类型
if (IsrStatus & (u32)XUARTPS_IXR_RXOVR) /* 检查RxFIFO是否触发 */
{
ReceivedCount = XUartPs_Recv(UartInstancePtr, RecvBuffer, (TEST_BUFFER_SIZE-TotalReceivedCount)) ;
TotalReceivedCount += ReceivedCount ;
RecvBufferPtr += ReceivedCount ;
/* 清除中断标志 */
XUartPs_WriteReg(UartInstancePtr->Config.BaseAddress, XUARTPS_ISR_OFFSET, XUARTPS_IXR_RXOVR) ;
}
xil_printf("UART inter\r\n");
if (TotalReceivedCount >= TEST_BUFFER_SIZE) {
xil_printf("%s", RecvBuffer);
xil_printf("\r\nI have received %d bytes.\r\n", TotalReceivedCount);
RecvBufferPtr = RecvBuffer;
TotalReceivedCount = 0;
}
}
main
int main(void)
{
u32 IntrMask;
Uart_init();
XUartPs_SetOperMode(&Uart_PS, XUARTPS_OPER_MODE_NORMAL);
inter_init_connect();
XUartPs_SetHandler(&Uart_PS, (XUartPs_Handler)Handler, &Uart_PS);
IntrMask =XUARTPS_IXR_RXOVR;
XUartPs_SetFifoThreshold(&Uart_PS,8); //设置RxFIFO的中断触发等级
XUartPs_SetInterruptMask(&Uart_PS, IntrMask);
XScuGic_Enable(&InterruptController, 59);
while(1)
{
sleep(1);
xil_printf("UART 1s in main\r\n");
}
return 0;
}

