本文主要简要介绍以下经典网络结构:
- AlexNet
- VGG
- NIN
- GoogLeNet
- ResNet
- DenseNet
- MobileNet
- ShuffleNet
AlexNet:多层不同大小的卷积层+全连接
参考链接:
Netscope
深度学习卷积神经网络-AlexNet
AlexNet神经网络结构 - 牧野的博客 - CSDN博客
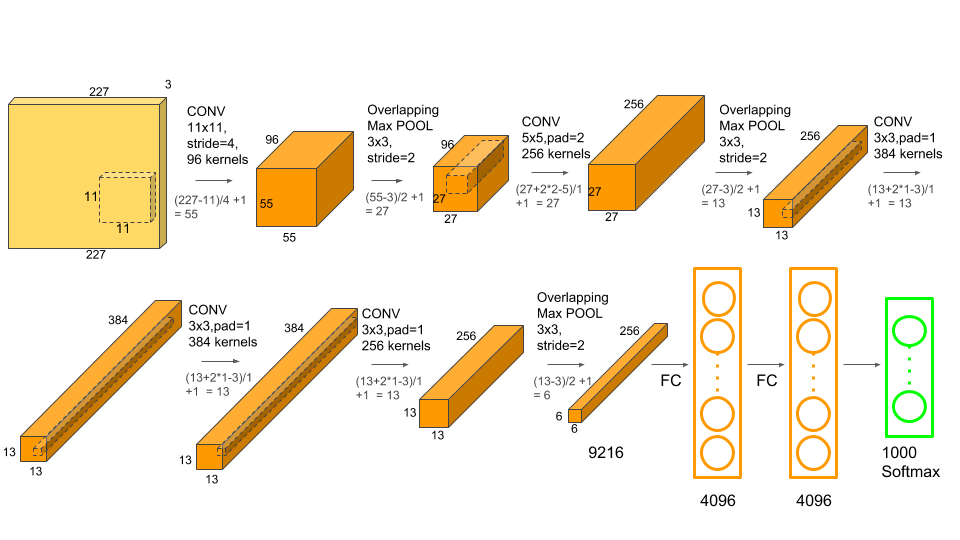 AlexNet 结构示意图
AlexNet 结构示意图
conv1 阶段
输入数据:227×227×3
卷积核:11×11×3;步长:4;数量(也就是输出个数):96
卷积后数据:55×55×96 (原图N×N,卷积核大小n×n,卷积步长大于1为k,输出维度是(N-n)/k+1)
relu1后的数据:55×55×96
Max pool1的核:3×3,步长:2
Max pool1后的数据:27×27×96
norm1:local_size=5 (LRN(Local Response Normalization) 局部响应归一化)
最后的输出:27×27×96
conv2 阶段
输入数据:27×27×96
卷积核:5×5;步长:1;数量(也就是输出个数):256
卷积后数据:27×27×256 (做了Same padding(相同补白),使得卷积后图像大小不变。)
relu2后的数据:27×27×256
Max pool2的核:3×3,步长:2
Max pool2后的数据:13×13×256 ((27-3)/2+1=13 )
norm2:local_size=5 (LRN(Local Response Normalization) 局部响应归一化)
最后的输出:13×13×256
conv2中使用了same padding,保持了卷积后图像的宽高不缩小。
conv3 阶段
输入数据:13×13×256
卷积核:3×3;步长:1;数量(也就是输出个数):384
卷积后数据:13×13×384 (做了Same padding(相同补白),使得卷积后图像大小不变。)
relu3后的数据:13×13×384
最后的输出:13×13×384
conv3层没有Max pool层和norm层
conv4 阶段
输入数据:13×13×384
卷积核:3×3;步长:1;数量(也就是输出个数):384
卷积后数据:13×13×384 (做了Same padding(相同补白),使得卷积后图像大小不变。)
relu4后的数据:13×13×384
最后的输出:13×13×384
conv4层也没有Max pool层和norm层
conv5 阶段
输入数据:13×13×384
卷积核:3×3;步长:1;数量(也就是输出个数):256
卷积后数据:13×13×256 (做了Same padding(相同补白),使得卷积后图像大小不变。)
relu5后的数据:13×13×256
Max pool5的核:3×3,步长:2
Max pool2后的数据:6×6×256 ((13-3)/2+1=6 )
最后的输出:6×6×256
conv5层有Max pool,没有norm层
fc6 阶段
输入数据:6×6×256
全连接输出:4096×1
relu6后的数据:4096×1
drop out6后数据:4096×1
最后的输出:4096×1
fc7 阶段
输入数据:4096×1
全连接输出:4096×1
relu7后的数据:4096×1
drop out7后数据:4096×1
最后的输出:4096×1
fc8阶段
输入数据:4096×1
全连接输出:1000
fc8输出一千种分类的概率。
整体来看,AlexNet的卷积核从11到5再到3不断变小,而feature map也通过重叠式max pool在第1、2、5层折半式缩小,到第5个卷积层后,图像特征已经提炼得足够充分,便用两个全连接层和一个softmax层组合得出最终的分类结果。
AlexNet相对于前辈们有以下改进:
1、AlexNet采用了Relu激活函数:ReLU(x) = max(x,0)
2、AlexNet另一个创新是LRN(Local Response Normalization) 局部响应归一化,LRN模拟神经生物学上一个叫做 侧抑制(lateral inhibitio)的功能,侧抑制指的是被激活的神经元会抑制相邻的神经元。LRN局部响应归一化借鉴侧抑制的思想实现局部抑制,使得响应比较大的值相对更大,提高了模型的泛化能力。LRN只对数据相邻区域做归一化处理,不改变数据的大小和维度。
侧抑制参考链接:常见的视觉现象 - 壹心理
3、AlexNet还应用了Overlapping(重叠池化),重叠池化就是池化操作在部分像素上有重合。池化核大小是n×n,步长是k,如果k=n,则是正常池化,如果 k<n, 则是重叠池化。官方文档中说明,重叠池化的运用减少了top-5和top-1错误率的0.4%和0.3%。重叠池化有避免过拟合的作用。
4、AlexNet在fc6、fc7全连接层引入了drop out的功能。dropout是指在深度学习网络的训练过程中,对于神经网络单元,按照一定的概率(AlexNet是50%,这种情况下随机生成的网络结构最多)将其暂时从网络中丢弃(保留其权值),不再对前向和反向传输的数据响应。注意是暂时,对于随机梯度下降来说,由于是随机丢弃,故而相当于每一个mini-batch都在训练不同的网络,drop out可以有效防止模型过拟合,让网络泛化能力更强,同时由于减少了网络复杂度,加快了运算速度。还有一种观点认为drop out有效的原因是对样本增加来噪声,变相增加了训练样本。
5、数据增强:在数据处理这部分作者提到过将每张图片处理为256××256的大小,但网络结构图中的输入却为224××224,这是因为作者在256××256大小的图片上使用了一个224××224的滑动窗口,将每个滑动窗口中的内容作为输入,这样就能将整个数据集扩大到原来的(256−224)×(256−224)=1024(256−224)×(256−224)=1024倍
AlexNet TensorFlow 实现:
from datetime import datetime
import math import time import tensorflow as tf batch_size=32 num_batches=100 def print_activations(t): print(t.op.name, ' ', t.get_shape().as_list()) def inference(images): parameters = [] # conv1 with tf.name_scope('conv1') as scope: kernel = tf.Variable(tf.truncated_normal([11, 11, 3, 64], dtype=tf.float32, stddev=1e-1), name='weights') conv = tf.nn.conv2d(images, kernel, [1, 4, 4, 1], padding='SAME') biases = tf.Variable(tf.constant(0.0, shape=[64], dtype=tf.float32), trainable=True, name='biases') bias = tf.nn.bias_add(conv, biases) conv1 = tf.nn.relu(bias, name=scope) print_activations(conv1) parameters += [kernel, biases] # pool1 lrn1 = tf.nn.lrn(conv1, 4, bias=1.0, alpha=0.001 / 9.0, beta=0.75, name='lrn1') pool1 = tf.nn.max_pool(lrn1, ksize=[1, 3, 3, 1], strides=[1, 2, 2,