前言
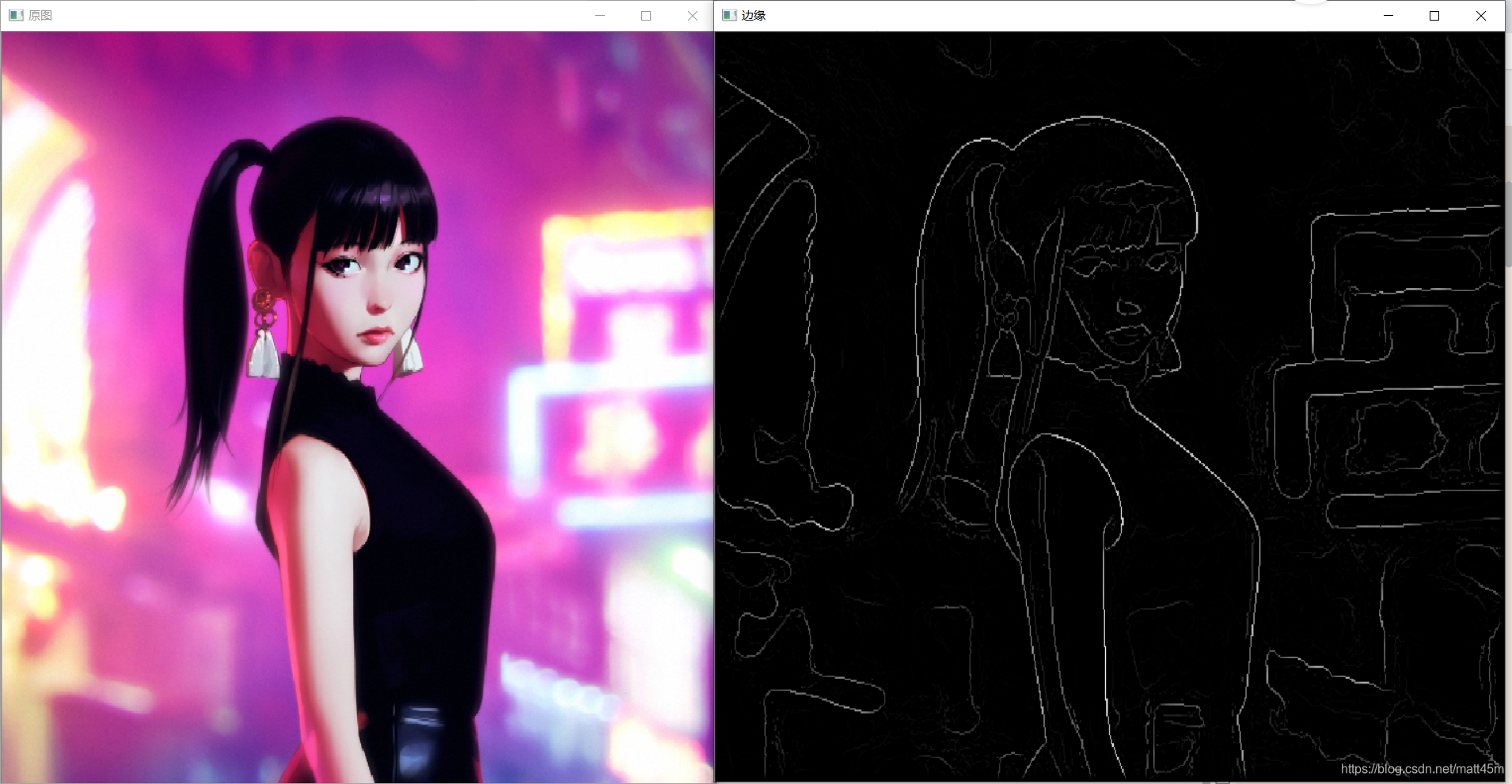
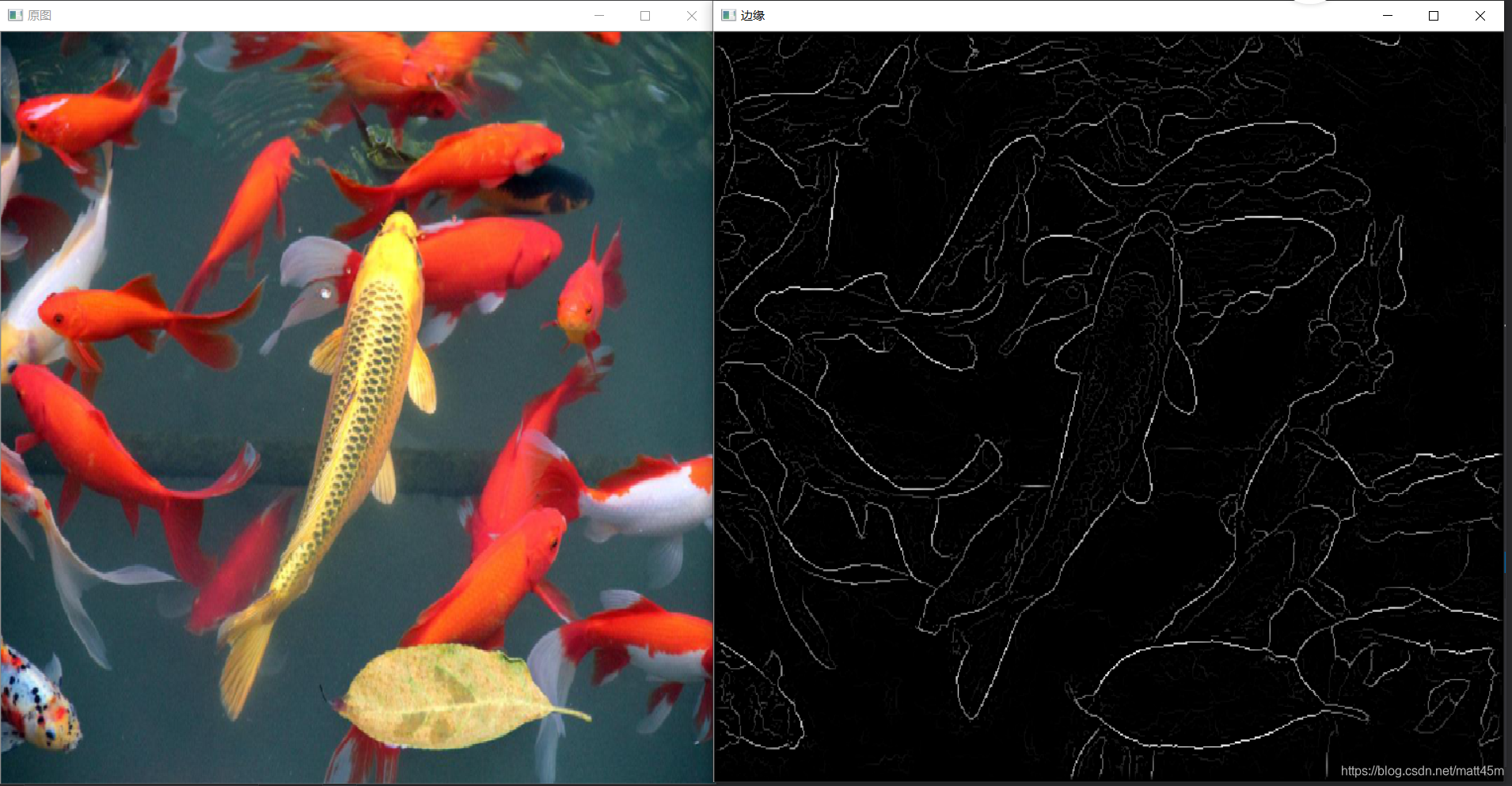
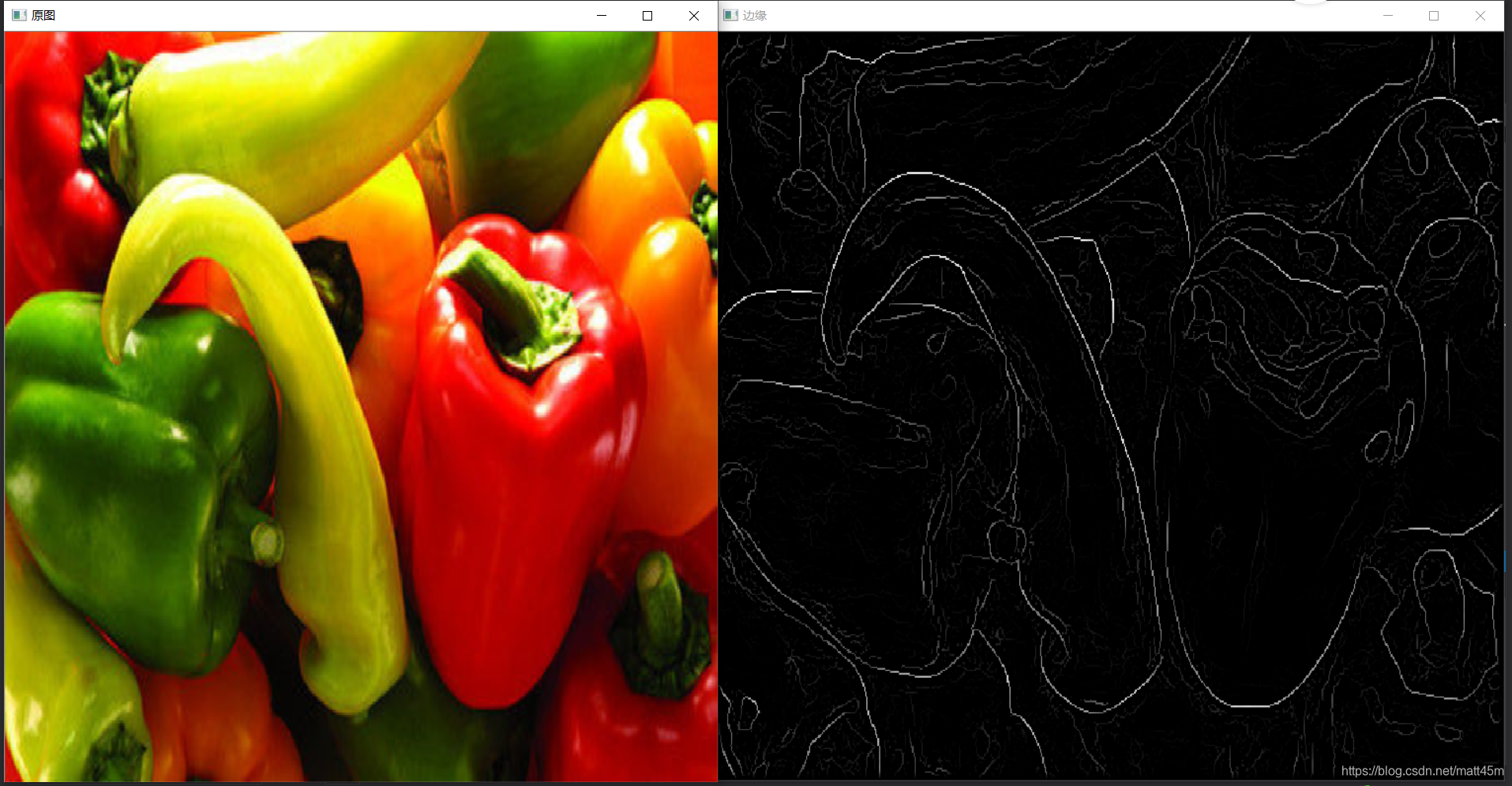
传统的边缘检测对一些内容,色彩比较丰富的图像,提取出来的边缘并不理想,ECCV2014来自于微软研究院的Piotr等人的《Edge Boxes: Locating Object Proposals from Edges》这个文章,采用的是纯图像的方法实现了目标检测的算法,也是基于物体的边缘分割。这个算法对边缘的提取要好过传统的canny算法。如果想要深入了解可以看大神的论文。
Edge Boxes
1.检测代码
void edgebox(Mat &src,Mat &dst, modelInit &model, paraClass &o)
{
Mat I = src.clone();
assert(I.rows != 0 && I.cols != 0);
clock_t begin = clock();
model.opts.nms = 1;
Mat I_resize;
float shrink = 4;
resize(I, I_resize, Size(), 1 / shrink, 1 / shrink);
tuple<Mat, Mat, Mat, Mat> detect = edgesDetect(I_resize, model, 4);
Mat E, O, unuse1, unuse2;
tie(E, O, unuse1, unuse2) = detect;
E = edgesNms(E, O, 2, 0, 1, model.opts.nThreads);
Mat bbs;
cout << 1 << endl;
bbs = edgebox_main(E, O, o) * shrink;
cout << "time:" << ((double)clock() - begin) / CLOCKS_PER_SEC << "s" << endl;
I.copyTo(dst);
//for top10 box scores
for (int i = 0; i < model.opts.showboxnum; i++) {
//draw the bbox
Point2f p1(bbs.at<float>(i, 0), bbs.at<float>(i, 1));
Point2f p2(bbs.at<float>(i, 0) + bbs.at<float>(i, 2), bbs.at<float>(i, 1) + bbs.at<float>(i, 3));
Point2f p3(bbs.at<float>(i, 0), bbs.at<float>(i, 1) + bbs.at<float>(i, 3));
Point2f p4(bbs.at<float>(i, 0) + bbs.at<float>(i, 2), bbs.at<float>(i, 1));
int tlx = (int)bbs.at<float>(i, 0);
int tly = (int)bbs.at<float>(i, 1);
//brx may be bigger than I.cols-1
//bry may be bigger than I.rows-1
int brx = std::min((int)(bbs.at<float>(i, 0) + bbs.at<float>(i, 2)), I.cols - 1);
int bry = std::min((int)(bbs.at<float>(i, 1) + bbs.at<float>(i, 3)), I.rows - 1);
Mat box;
box = I.colRange(tlx, brx).rowRange(tly, bry);
rectangle(dst, p1, p2, Scalar(0, 255, 0), 1);
Point2f ptext(bbs.at<float>(i, 0), bbs.at<float>(i, 1) - 3);
putText(dst, to_string(bbs.at<float>(i, 4)), ptext, FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0), 1);
}
}
void edgeDetection(Mat &src, Mat &dst, modelInit &model, paraClass &o)
{
Mat I = src.clone();
assert(I.rows != 0 && I.cols != 0);
///clock_t begin = clock();
model.opts.nms = 1;
Mat I_resize;
float shrink = 4;
tuple<Mat, Mat, Mat, Mat> detect = edgesDetect(I, model, 4);
Mat E, O, unuse1, unuse2;
tie(E, O, unuse1, unuse2) = detect;
E = edgesNms(E, O, 2, 0, 1, model.opts.nThreads);
Mat bbs;
bbs = edgebox_main(E, O, o) * shrink;
double E_min, E_max;
cv::minMaxLoc(E, &E_min, &E_max);
dst = (E - E_min) / (E_max - E_min) * 255;
dst.convertTo(dst, CV_8U);
}
2.运行效果