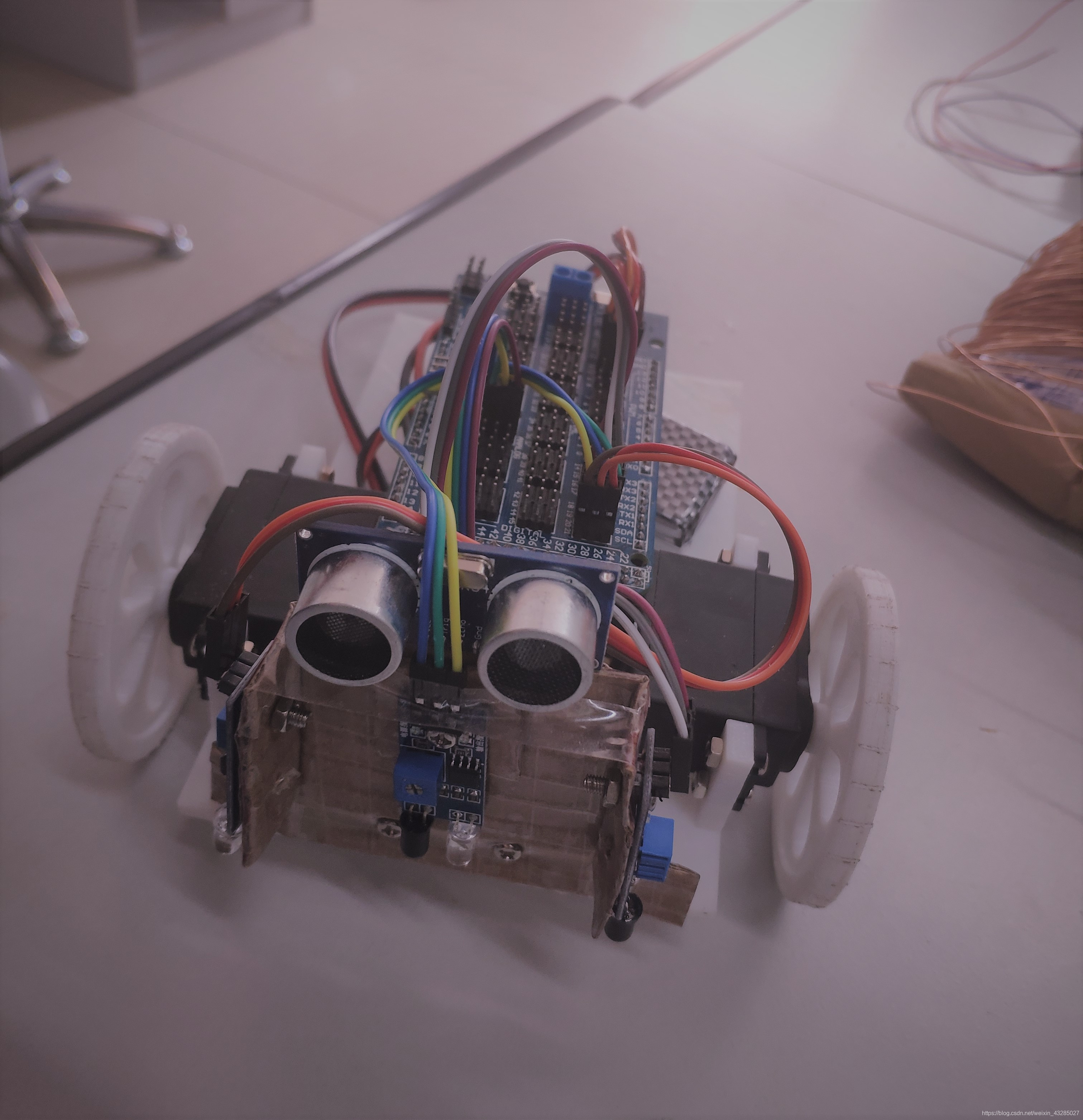
基于Arduino的超声波避障小车
利用超声波,判断前方是否有障碍物,如果有小车转向,没有小车直行
所需材料
- 小车车架及车轮(可以用sw建模然后利用3D打印机打印,也可以在网上直接购买小车地板,用纸板最廉价O(∩_∩)O哈哈~)
- Arduino开发板及扩展板
- 两个360度舵机(我是以舵机为驱动的,也可以用电机)
- 杜邦线若干
- 超声波模块
- 锂电池
组装小车及模块调试
舵机调试利用代码使舵机前传后传停止
参考代码如下:
#include <Servo.h>
Servo servo; //定义舵机
void setup()
{
servo.attach(2);//舵机串口设为2
}
void loop()
{
servo.write( 360 );//舵机前转
delay(1000);
servo.write( -360 );//舵机后转
delay(1000);
servo.write( 90 );//舵机停止
delay(1000);
}
超声波模块调试:
int Ecoh=A6;//Ecoh为回声脚
int Trig=A7;//Trig为触发脚
int Distance;
void setup()
{
Serial.begin(9600);//初始化串口
pinMode(Ecoh,INPUT);//定义超声波输入脚
pinMode(Trig,OUTPUT);//定义超声波输出脚
}
void loop()//距离测试
{
digitalWrite(Trig,LOW);//给触发脚低电平2微妙
delayMicroseconds(2);
digitalWrite(Trig,HIGH);//给触发脚高电平10微妙
delayMicroseconds(10);
digitalWrite(Trig,LOW);//给触发脚持续低电平
float Fdistance=pulseIn(Ecoh,HIGH);//读取高电平时间
Fdistance=Fdistance/58;//L(m)=t(s)*344/2
Distance=Fdistance;
if(Fdistance<400)
{
Serial.print("Distance:");//输出距离
Serial.print(Fdistance);//距离
Serial.print("cm\n");
}
else
Serial.print("!!!out of range!!!\n");
}
小车避障代码.
#include <Servo.h>
Servo servo_pin_right; //定义右驱动
Servo servo_pin_left; //定义左驱动
int Ecoh=A6;//Ecoh为回声脚
int Trig=A7;//Trig为触发脚
int Distance;
void setup()
{
Serial.begin(9600);//初始化串口
pinMode(Ecoh,INPUT);//定义超声波输入脚
pinMode(Trig,OUTPUT);//定义超声波输出脚
servo_pin_right.attach(9);//右驱动串口设为9
servo_pin_left.attach(10);//左驱动串口设为10
}
//===========小车基本运动===============
//void car_go(int time)//小车直行
void car_go()
{
servo_pin_left.write( 360 );//左轮前进
servo_pin_right.write( -360);//右轮前进
//delay( 100*time );//执行时间
}
void car_left(int time)//小车左转
{
servo_pin_left.write( 90);//左轮后退
servo_pin_right.write( -360 );//右轮前进
delay( 100*time );//执行时间
}
void car_back(int time)//小车后退
{
servo_pin_left.write( -360 );//左轮后退
servo_pin_right.write(360 );//右轮后退
delay( 100*time );//执行时间
}
void car_right(int time)//小车右转
{
servo_pin_left.write( 360 );//左轮前进
servo_pin_right.write( 90);//右轮后退
delay( 100*time );//执行时间
}
void car_stop(int time)//小车停止
{
servo_pin_left.write( 90 );//左轮停止
servo_pin_right.write(90 );//右轮停止
delay( 100*time );//执行时间
}
void Distance_test()//距离测试
{
digitalWrite(Trig,LOW);//给触发脚低电平2微妙
delayMicroseconds(2);
digitalWrite(Trig,HIGH);//给触发脚高电平10微妙
delayMicroseconds(10);
digitalWrite(Trig,LOW);//给触发脚持续低电平
float Fdistance=pulseIn(Ecoh,HIGH);//读取高电平时间
Fdistance=Fdistance/58;//L(m)=t(s)*344/2
Distance=Fdistance;
if(Fdistance<400)
{
Serial.print("Distance:");//输出距离
Serial.print(Fdistance);//距离
Serial.print("cm\n");
}
else
Serial.print("!!!out of range!!!\n");
}
void loop()
{
while(1)
{
Distance_test();
if(Distance<24)
{
while(Distance<24)
{
car_right(2);
car_stop(1);
Distance_test();
}
}
else
car_go();
}
}