记录使用webots过程
目标:
-
机器人仿真
-
Python交互界面
-
添加关节
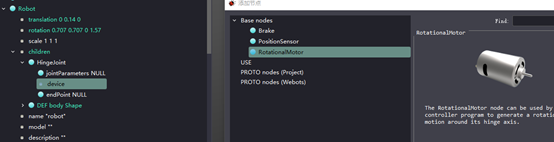
首先添加关节

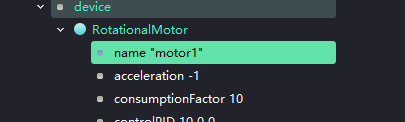
给关节添加驱动,选择电机
电机name为motor1,是名字不是DEF
2、添加关节EndPoint
什么是Endpoint呢,看图,完美解释

添加Solid,然后再children下添加Transform,在Transform下的children下添加Shape,Shape下添加圆柱


为啥弄这么麻烦,刚开始我也觉得,后来发现这些都是有用的。
Transform下平移反转可以调整位置,这也就是Transform的作用


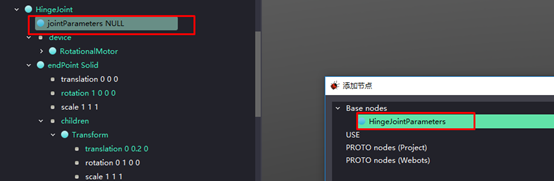
在关节下添加参数

为了提高展示效果,我们先不添加物理和边框,并且把Robot的物理也先删除
3、控制器
控制器处于输出Hello Word阶段,不知道的可回顾前面文章。


可看到圆柱围绕着方块转


完,下篇调整参数,使电机围绕正确的方向转
闻道有先后
术业有专攻
