Notas del estudio ROS tres
Herramienta de línea de comandos ROS
Comandos de uso común:
- rostopic
- rosservice
- rosnode
- gruñó
- rosmsg
- rossrv
Tomemos a las tortugas bebé como ejemplo.
Ejecutar roscore

Ejecute el nodo turtlesim
 Tortugas bebé emergentes:
Tortugas bebé emergentes:

Ejecute el nodo turtle_teleop_key

llevar a cabo.
instrucción rqt_graph
Las herramientas al comienzo de rqt son todas herramientas de visualización basadas en qt.
rqt_graph es una herramienta que se utiliza para mostrar gráficos de cálculo del sistema.

Aparece un cuadro de diálogo: el

óvalo representa el nodo que se está ejecutando actualmente, turtlesim es el nodo del simulador, teleop_turtle es el nodo de control del teclado y los dos nodos se comunican a través del tema turtle1 / cmd_vel para transmitir información sobre la velocidad de la tortuga.
herramienta rosnode
Comandos utilizados para mostrar toda la información de los nodos en el sistema
lista rosnode
Este comando enumera los nodos que se ejecutan en el sistema: se
 encuentra que la información del nodo que se muestra es diferente a la anterior, pero se agrega un rosout adicional. Este nodo es el tema que se inicia por defecto cuando roscore está habilitado en el entorno ros, y se utiliza para recopilar cada uno de los ros No importa la información de registro del nodo.
encuentra que la información del nodo que se muestra es diferente a la anterior, pero se agrega un rosout adicional. Este nodo es el tema que se inicia por defecto cuando roscore está habilitado en el entorno ros, y se utiliza para recopilar cada uno de los ros No importa la información de registro del nodo.
información rosnode
Ver la información de un nodo específico.

herramienta rostopic
Se utiliza para ver contenido relacionado con el tema.
lista rostopic
Imprima una lista de todos los temas del sistema.

pub rostopic
Publicar datos en un tema determinado. El tema anterior / turtle1 / cmd_vel es el tema de comunicación entre el nodo de control del teclado y el nodo del emulador. Podemos publicar datos en este tema a través de rostopic pub para controlar las tortugas.
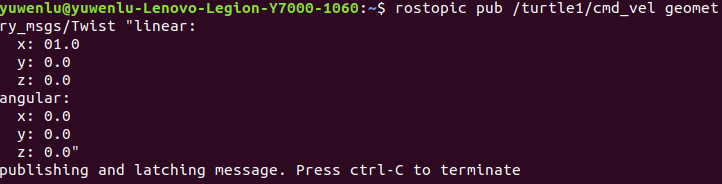
Haga doble clic en la tecla Tab para realizar la finalización automática. Después de que se emite la instrucción, la tortuga avanza a una velocidad lineal de 1 m / s, pero la tortuga se detendrá automáticamente después de un período de tiempo, porque dicho mensaje solo se publicará una vez, y puede agregarlo después de la publicación. El parámetro especifica la frecuencia con la que se publica el mensaje.
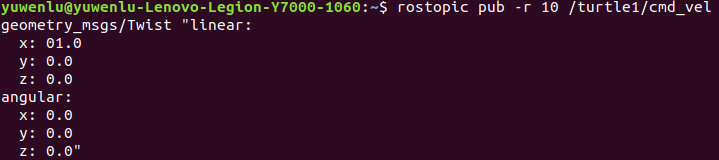
Esta vez se descubrió que la pequeña tortuga seguía moviéndose a una velocidad lineal de 1 m / s hasta que chocó contra la pared.
Puede utilizar Ctrl + C para finalizar la tarea actual en cualquier momento durante el proceso.
herramienta rosmsg
Puede usarse para ver el contenido del mensaje relevante.
espectáculo de rosmsg
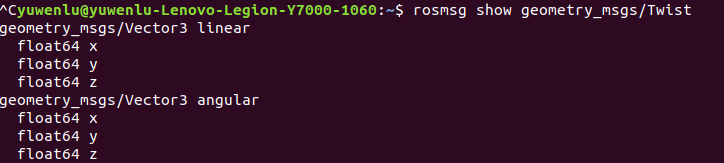 Aquí puede mostrar los atributos de contenido del mensaje que acaba de publicar.
Aquí puede mostrar los atributos de contenido del mensaje que acaba de publicar.
herramienta rosservice
Ver contenido sobre el servicio
lista de servicios

Imprima una lista de servicios en el sistema actual.
llamada de servicio
Publique una solicitud para llamar al servicio.
Vemos que / spawn es un servicio relacionado con el desove de tortugas, que puede usarse para desovar dos tortugas al mismo tiempo.
 También haga doble clic en la tecla Tab para completar la información.
También haga doble clic en la tecla Tab para completar la información.
En este momento, aparecieron dos tortugas en la pantalla.

herramientas rosbag
Herramienta de registro de temas, que registra y guarda los datos del tema actual en el sistema, que se pueden reproducir más tarde y se puede utilizar para la reproducción de datos de vuelo de drones.
registro de rosbag
 Aquí -a significa registrar los datos de todos los temas, -O significa comprimir los datos en un paquete de archivos denominado como parámetro posterior.
Aquí -a significa registrar los datos de todos los temas, -O significa comprimir los datos en un paquete de archivos denominado como parámetro posterior.
Después de la ejecución, se mostrará el tema que se está monitoreando.
En este momento, controlamos la pequeña tortuga a través del teclado, y Ctrl + C finaliza la tarea actual después de un período de tiempo. Se registrarán todos los datos de temas publicados durante este tiempo.
juego de rosbag
Este comando puede reproducir los paquetes de datos recién almacenados. Cerramos todos los terminales anteriores, volvemos a abrir roscore, ejecutamos turtlesim_node y ya no ejecutamos el controlador del teclado. Utilice este comando para reproducir los datos del tema en este momento.
 Descubrimos que la pequeña tortuga se movía automáticamente de acuerdo con la trayectoria de este momento.
Descubrimos que la pequeña tortuga se movía automáticamente de acuerdo con la trayectoria de este momento.