M3M4M5M6:(本人的本职负责为M5M6,兼职负责M3M4)
一、个人模块部分的不同方案分析:
M5M6所负责的是A级实验的上位机软件模块,要求负责控制命令发送、采样数据接收、数据处理、数据图形化显示、数据文件保存等等。相当于要我们写一个功能完备的串口助手出来,并且相对于之前在第八次实验老师给的串口助手更加高级,需要增添图形显示界面。我从开始到最终结束,从网上找到了十几个大神所给的代码文件,有Python的有VS的,后来发现完全没法用,太高级,所以干脆自己写,又写了四五个版本,最终得到一个能用的。可以比较完备的显示的。

网上代码

自己写的
由于我们选用Python语言来设计上位机的软件功能模块和UI交互模块,这里通过学习从网上找来的代码,发现可以使用Python中的serial库来设计串口通信功能模块,通过pyqt库或者tkinter库来设计UI交互界面,pygragh库可以进行图形绘制,这么多的网上代码无怪乎如此。所以我尝试了很多。首先尝试从serial库入手,先尝试建立起串口通信,这就是串口1文件夹,发现实际上串口通信在上位机很简单,只需要调用read和write函数就可以;于是就开始设计图像绘制,这就是串口2文件夹,发现可以使用pygragh库进行图形的实时绘制;然后开始设计UI交互界面,这里很麻烦,我尝试了两种使用pyqt库来设计ui界面的方法,但由于pyqt库太过复杂,两种都失败了,就是串口3和串口3’文件夹;没办法尝试使用tkinter库来设计UI界面,成功了,这就是串口4文件夹。如下:

M3M4模块是负责本次A级实验的串口通信模块的下位机电路工程设计,是本次实验的难点之一,要求配合上位机模块实现解析控制命令、驱动采样模块、封装并上传数据等等。最难的是如何与上位机约定好协议实现数据的传输。这个在网上是找不到现有的工程的,也没有能够作为借鉴的资料文件,真正的无中生有。从开始到结束,我和我的同伴总共写了十一个版本,其中小的修改不计其数,最终才得到了一个能用的串口通信模块,并整合到了整个实验工程模块中。

我和我的同伴走的是两条路,我写的是串口工程四个文件夹,他写的是串口通信七个文件夹,希望两路并进来实现这个模块。我所走的是通过增设一个字节的标志位来传递几个字节的数据,这个数据的字节数可以自己进行设定。由于一开始不知道小板子的通信是如何进行的,还是按照之前我们给的小板子进行设计,设计了一个并行通信的工程,当然是失败了,不过还是为测试上位机软件做出了贡献。然后开始在实验板上进行设计,却发现怎么都不成功。最气人的是即便在电脑上功能仿真成功了,在板子上还是不成功,用串口助手接收不到数据。

这几个文件夹先后攻克了分频问题(分频错误)、标志位无法识别问题(时钟不匹配导致标志位无法正确识别)、数据传输问题(没有设计好传输协议)、数据封装问题(之前一直不知道需要对数据进行封装),最终回归到串口工程文件夹,写出了可以正常运行、正常数据传输的串口工程。
然后整合到最终结果上,设计完整的电路工程,又写了九个,最终得到了好的结果,也算是苦尽甘来、水到渠成了,毕竟,过程再坎坷,磕磕绊绊也无所谓,把所有的坑踩遍,最后也能到达终点,而且收获也最多。
二、所选方案和实现:
M5M6模块上面说我写了5个文件夹分别对串口通信、图形绘制、UI交互三个方面进行了实现,接下来需要进行整合。一开始尝试以串口通信为主进行整合,却发现没有办法实现UI界面,后来尝试以UI交互界面为主进行整合,发现很难将图像绘制和UI界面进行整合,最终决定摒弃之前的绘图方式,即放弃使用pygragh库进行图形的实时绘制,而是采用tkinter库中的画布函数来实现直接在UI界面中实现图形的实时绘制,并通过定义全局变量来实现对串口通信数据的保留和保持,最终实现了上位机软件,具体如下:
单单为了实现整合,我就写了十几个文件,有复杂的有简单的,复杂的可以到三四个文件来构成一个软件,简单的却只有十几行用来测试能否正确绘图,最终的tkin窗口2.0和tkin窗口2.1都是成功结果,而2.1相对于2.0增加了一些花里胡哨的音色、音量调节的功能,在后面将会提到。
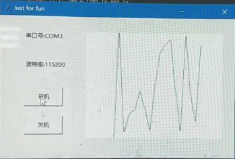
这里首先使用2.0版本的进行整体的设计和实验,设计了开机关机按钮和“串口号”、“波特率”、“平均值”三个标签用来表示当前程序的状态。设计了右侧的部分进行动态图形绘制。
具体代码如下:
# encoding: utf-8
import tkinter
import serial
import serial.tools.list_ports
import random
import sys
import time
import easygui as g
import numpy as np
from tkinter import Tk,StringVar
from pyico import *
ser=0
pq=0
N=200
M=1
Q=0
tmp=0
ftmp=0
ii=0
r=''
rr=""
star='0'
end='0'
tt=0
L=[]
def com():
port_list=list(serial.tools.list_ports.comports())
if len(port_list)==0:
g.msgbox('警告','找不到串口','拜拜了您嘞')
return '0'
# print('找不到串口')
else:
for i in range(0,len(port_list)):
print(port_list[i])
ss=str(port_list[0])
return ss[0:4]
def a():
global ii,rr,tmp,Q,ftmp,end,pq,tt,r,L
# num=ser.inWaiting()
# while num!=1:
# print(num)
# ss=ser.read(16)
# num=ser.inWaiting()
ser.flushInput()
num=ser.inWaiting()
# print(num)
data0=bytes([0x2a])
data1=bytes([0x30])
# data2=bytes([0x2a])
# data3=bytes([0x00])
# print(data0)
# print(data1)
ser.write(data0)
ser.write(data1)
num=ser.inWaiting()
# print(num)
# while num:
# num=ser.inWaiting()
# print(num)
# if num==4:
# ser.write(data2)
# ser.write(data3)
# print(data0)
# print(data1)
# print(num)
if num>0:
# print(num)#查看当前有多少数据在缓存区
s0=ser.read(2)
ser.flushInput()
# s0=ser.read(1)
# print(s0[0],s0[1])
# print(s1)
if s0[0]==0:#修改点
# print("zhi",s0[0],s0[1])
ftmp=tmp
# tmp=s[0]*256+s[1]
tmp=s0[1]
# print(tmp)
if(len(L)==10):
del L[0]
L.append(tmp)
else:
L.append(tmp)
if pq==0:
ftmp=tmp
pq=pq+1
count=np.bincount(L)
tmp=np.argmax(count)
print(tmp)
# print(pq)
oupu.write(str(M*Q)+':'+str(tmp)+'\n')
Q=Q+1
win.create_line(245,ftmp*0.8,255,tmp*0.8)
for ie in range(0,pq+1):
win.move(ie,-6,0)
top.update()#刷新
# print("zhi")
# ftmp=tmp
# # tmp=s[0]*256+s[1]
# tmp=s0[0]
# print(tmp)
# if(len(L)==10):
# del L[0]
# L.append(tmp)
# else:
# L.append(tmp)
# if pq==0:
# ftmp=tmp
# pq=pq+1
# # print(pq)
# oupu.write(str(M*Q)+':'+str(tmp)+'\n')
# Q=Q+1
# win.create_line(240,ftmp+20,260,tmp+20)
def kaishi():
global star,end
star='start'
print('kaishi')
# ass=[0,1,0,1,0,1,0,1]
data0=bytes([0x2a])
data1=bytes([0x00])
# print(data0)
# print(data1)
ser.write(data0)
ser.write(data1)
# data=bytes([0xE8])
while end!='end':
a()
oupu.close()
def jieshu():
global end
print('jieshu')
end='end'
# ass=[1,1,1,1,1,1,1,1]
data0=bytes([0x2a])
data1=bytes([0xaa])
# print(data0)
# print(data1)
ser.write(data0)
ser.write(data1)
top.quit()
def junzhi():
global L
df=0
for i in L:
df=df+i
ttmp=str(df/len(L))
# ttmp='123456'
Label4=tkinter.Label(top,text="平均值:"+ttmp,fg='black')#bg='light gray',
Label4.place(relx=0.1,rely=0.3)
ssss=com()
if ssss!='0':
top=tkinter.Tk()
top.title('波形显示串口助手')#标题
top.resizable(0,0)#大小可调性
top.geometry('500x300')#大小
bote=9600
oupu=open('output1.txt','w')
ser = serial.Serial(ssss, bote)
Label1=tkinter.Label(top,text=("串口号:"+ssss),fg='black')#bg='light gray',
Label1.place(relx=0.1,rely=0.1)
Label2=tkinter.Label(top,text="波特率:"+str(bote),fg='black')#bg='light gray',
Label2.place(relx=0.1,rely=0.2)
Label3=tkinter.Label(top,text="平均值:",fg='black')#bg='light gray',
Label3.place(relx=0.1,rely=0.3)
button1=tkinter.Button(top,text="开机",command=kaishi,bg='light gray',fg='black')
button1.place(relx=0.1,rely=0.45,width=80,height=40)
button2=tkinter.Button(top,text="关机",command=jieshu,bg='light gray',fg='black')
button2.place(relx=0.1,rely=0.6,width=80,height=40)
button3=tkinter.Button(top,text="均值",command=junzhi,bg='light gray',fg='black')
button3.place(relx=0.1,rely=0.75,width=80,height=40)
win=tkinter.Canvas(top,bg='light gray')
win.place(relx=0.35,rely=0.1,width=310,height=240)
top.update()#刷新
top.mainloop()
其中包含了大量的注释掉的程序语句,因为在我将整个程序的整体框架确定下来之后,对这个程序调试了很多遍,最终得到的代码行数实际上只有100行左右,但功能却能完整的实现。
M3M4首先对单个的串口工程进行实验,最终选定的方案是设置标记位为“01010100”,然后在串口工程中先搜索接受的上位机数据中有没有“010”的三位二进制数,如果找到就再搜索有没有“00”的二进制数,如果找到则说明找到了标志位,“00”之后的八位二进制数就是上位机传给下位机的真正数据。然后上传给上位机的时候,一开始没有注意到需要对数据进行封装,还是尝试着先发八个二进制“00000000”作为标志位,再跟上八位二进制的数据,但怎么也传不上去,后来在科三的同学的帮助下,知道了需要对数据进行封装,每八位数据需要在最前面加0,在最后面加1,将原本的8位数转换为10位数后才可以让芯片进行识别,将中间的8位数据传送给上位机,最终得到的串口工程如下:
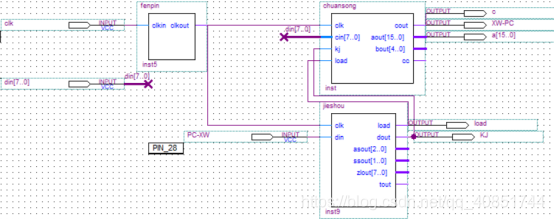
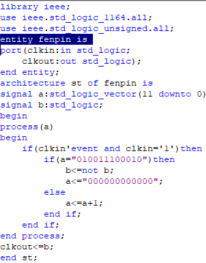
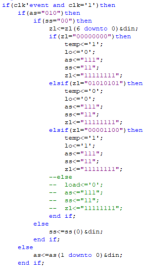
fenpin模块负责将输入的24Mhz的输入信号转换为9600hz的时钟信号,用来控制数据的传输。jieshou模块负责接收从上位机发送的数据,并产生相应的kj开机控制信号和load数据上传控制信号。chuansong模块负责接收外界给的八位二进制数据,进行封装之后在load和kj控制信号的控制下传递给上位机,这里只截取了三个元件中的部分主要代码,因为截取全部代码太占据空间了,而且所截取的代码是功能的主要实现部分,已经可以体现如何实现功能模块。
具体模块如下:
三、验证方法:
M5M6模块基于pycharm软件进行设计,总共调用了Python语言的tkinter库、serial库、random库、sys库、time库、easygui库、numpy库、pyico库八个库,具体框架为通过tkinter库来设计UI交互界面,通过tkinter库中的canvas库设计画布,通过move函数实现动态绘图,通过serial库实现串口读写操作,通过easygui库实现警告信息,通过numpy库实现数值稳定,通过random库实现功能测试。
首先要验证整个软件的模块逻辑是否正确。本软件的逻辑为:首先通过com()函数自动查找当前可用于通信的串口,如果没有将会弹出一个easygui的弹窗,否则将会弹出软件的UI操作界面。界面有开机按钮、关机按钮和取平均值按钮,当选择开机按钮后将会给予下位机开机指令,并进入循环,持续向下位机发送请求数据的指令,并接收下位机发送的数据,经过取众数处理后从最近的10个中取出众数(以此来提高软件的抗干扰能力),并绘制图像显示在右侧;选择关机按钮后将会向下位机发送关机指令,并自动关闭弹窗;当选择取均值按钮后将会自动计算最近10个数的平均值,并显示在界面指定位置。界面指定位置会显示当前的串口和预置的波特率(9600)。
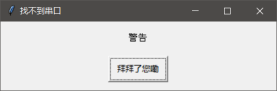
在测试方面基于小板子,首先测试串口是否正常打开,然后通过random函数向板子发送一个上位机随机生成的数值,传给下位机后下位机进行显示,并原封不动的传给上位机,在上位机的数值显示部分进行图形的绘制,这里先注释掉了取平均值的功能,并选择了115200的波特率用来简单测试。最终得到的结果如下:
在小板子上初步实现了之后,开始思考波特率的问题。由于下位机模块的数据读取是在1Mhz,而板子给定的时钟是24Mhz,经过与下位机模块负责人讨论后确定使用9600波特率,即一秒钟传送9600位,这样只需要将原本的24Mhz除以2500就可以得到9600hz的时钟信号。经过在给定的实验板上进行测试,发现正确,至此,上位机需要做的事情已经基本完成。
M3M4这里首先对所编写工程的逻辑性进行验证分析。首先初始状态kj开机控制信号的寄存器为‘0’,load装载控制信号的寄存器为‘0’,表示此时没有开机,也没有进行装载操作,不会向上位机发送特定数据(注意,还是会发送无意义的数据),而此时上位机也处于待机状态,不会接受特定数据(串口会持续发送默认的“11111111”),然后上位机给予开机信号,接收模块接收到后控制kj开机控制信号寄存器为‘1’,表示开机,整个工程开始工作。当上位机发送数据传送控制信号的时候,接收模块接收到后控制load装载控制信号寄存器为‘1’,表示开始装载,传送模块将外部输入的八位数据存储到寄存器中,并进行封装,然后将标记位也进行封装,最终得到一个二十位的二进制数据,传送给芯片,并最终传送到电脑,展示在串口助手上。
然后进行功能仿真,并最终放到整个工程中进行验证,发现结果正确,可以在上位机接收到数据,并展示在图像上。
这里需要考虑时钟信号的问题,上位机的波特率限定为9600,传入的时钟频率为24Mhz,所以需要除以2500才能得到正确的时钟信号,这里只需要写一个计数器,要求每个时钟上升沿进行计数,当记录到1250的时候进行清零,然后将输出信号取反就可以得到9600hz的时钟信号。
然后由于需要在整个电路上进行验证,所以需要添加到整个的工程文件上,即封装为bsf元件,然后与整个电路进行串联,最终得到的电路和运行结果如下:

四、下一步工作:
M5M6下一步可以在现有的基础上加一些花里胡哨的东西,来使UI界面更友好,即可以改变背景图片,改变UI界面的格式,增加音量音色调节按钮等等,期望实现的结果如下:

当前 1

期望 1
增加“小、中、大”的音量调节按钮和“1,、2、3、4”的音色调节按钮,最好可以和蜂鸣器模块负责的同学一起设计几首歌放入mif文件来进行显示。
M3M4模块通过测试发现虽然已经实现了串口通信,完成了A级实验,但当前工程的抗干扰能力不强,很容易受到机械噪音的影响导致绘制出来的图像有偏差。所以下一步工作可以尝试着从提高信号稳定性、增强通信稳定性、修改传递方式的传递数据、提高数据接收、数据读取、数据采集灵敏度等方面进行优化。
甚至可以通过上位机来输入数据实现一个电子琴的效果,当然,这是后话。
五、心得体会
本次设计总结:
这次的大综合实验很考验人,我和我的搭档俞阳博因为之前有学习过Python语言所以选择了上位机软件设计M5M6模块。实际上选择的时候心里也没有底气,因为要我们设计软件,真的太难了,但别人更没有基础,所以还是去做了。一开始还抱着从网上找现成代码进行修改的想法,所以找了很多,不得不说csdn还是真的很厉害的,竟然找到了很多,但要么是没有串口通信模块,要么是没办法绘图,所以到最后实际上还是自己设计,不过从网上得到了很多的知识,对Python库的理解与应用也强了很多。到最后设计的串口助手是我自己真真正正一个人完成的,没有任何网上的代码,包括串口搜索、串口通信、动态绘图,都是我自己原创的想法。总的来说,Python语言进步了很多。
然后由于下位机通信模块和上位机软件模块连接非常紧密,而且下位机通信模块比较难,所以我就参与了下位机通信模块的设计,而且采用了和原本同伴并不同的方法,后来证实我的方法是正确的。而且这一部分告诉了我很多,如何进行通信,如何进行封装,为何要进行封装,以及如何进行上传下放,为我小学期打下了很好的基础。
学期总结:
这门实验课让我进步良多,也让我花费了很多时间,单说最后一个大综合实验,整个实验从头到尾做了两个多周,从5月6号开始创建了综合实验的文件夹开始,一直没停过,从早上八点到晚上十点整天泡在实验室,饿了就叫外卖,直到要睡觉了才回宿舍,说真的我都想打地铺住在实验室算了。这门实验课很好玩,能做很多真真正正的事情,感觉自己学习的东西真的有用,能够用在实际生活中,能够做一些实实在在的事情,也让我对我的小学期充满了期待。
这门实验课我的参与度很高,我也是真的喜欢这个实验,才会愿意花这么多时间去做。而且,说真的,我很喜欢实验室的环境,特别是五一假期的时候。五一假期我哪里也没有去,四天全都泡在了实验室里,没有一直在敲代码,而是写一写别的事情,也觉得自己的效率很高,实验室的环境真的很喜欢,也很适合我,那个五一假期也是我最充实的一个假期。
在实验室里能让我感觉得平静、积极,也能让我更专注于我目前正在做的事情,不管是敲代码还是记笔记,都是如此。现在很庆幸当初将自己的指纹录入在了系统里面,或许以后实验室可以作为一个我的自习的地方。
我早就从学长学姐那里听说了,小学期也是在工训,也是给一块板子让我们自己做一个工程出来,而且是随便做,想做什么做什么,上一届就有学长学姐做了密码锁、游戏机什么的,我自认为比不上上一届的学长学姐,但我也有我自己的想法。既然已经可以实现串口通信,那么我对制作一个密码锁已经充满了信心,所以我想先做一个密码锁来保底,能够完成小学期,然后自己再开始自己的研究,我真正想做的是一个机械手,用我的电脑进行控制,或者更进一步,我在我的手上带一个手套,然后通过测距将信息传递给下位机,下位机来做出相似的动作。这个很难,但如果只是简单的完成实验作业,就谈不上研究了。
