【毕业设计】57-基于单片机的超声波测距仿真倒车雷达系统设计(源程序+原理图工程+PCB+仿真工程+答辩论文)
资料要求
资料包含:毕业设计全套资料(精品)
原理图工程文件
原理图截图
PCB工程文件
仿真模型工程文件
源代码工程
仿真截图
搭建视频
实物图片
答辩论文低重复率文档
设计说明书
摘要
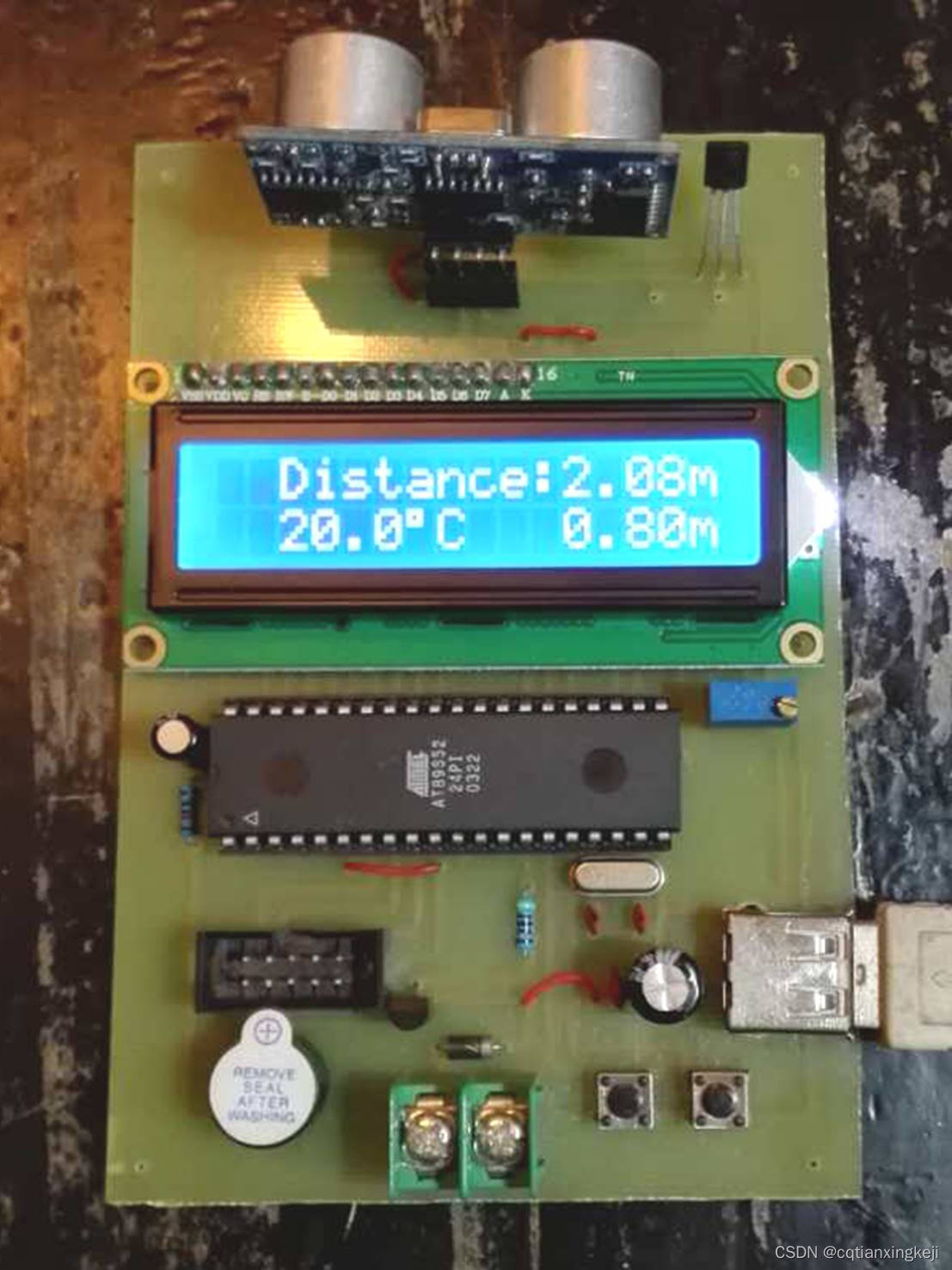
本设计介绍了基于单片机控制的超声测距仪的原理:由AT89S52控制定时计时,以HC-SR04超声波模块发射,接收,并计算超声波自发射至接收的往返时间,从而得到实测距离。并且在数据处理中采用了温度补偿的调整,用LCD1602液晶显示模块显示距离和温度。
整个硬件电路由超声波发射接收电路、电源电路、显示电路等模块组成。各探头的信号经单片机综合分析处理,实现超声波测距仪的各种功能。在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。相关部分附有硬件电路图、程序流程图,给出了系统构成、电路原理及程序设计。此系统具有易控制、工作可靠、测距准确度高、可读性强和流程清晰等优点。实现后的作品可用于需要测量距离参数的各种应用场合。
设计框架架构
Ultrasonic range finder system based on single chip. II
设计说明书及设计文件
源码展示
图4.4 DS18B20测温程序流程图
/*------------------------------------------------
18b20初始化
------------------------------------------------*/
bit Init_DS18B20(void)
{
bit dat=0;
DQ = 1; //DQ复位
DelayUs2x(5); //稍做延时
DQ = 0; //单片机将DQ拉低
DelayUs2x(200); //精确延时 大于 480us 小于960us
DelayUs2x(200);
DQ = 1; //拉高总线
DelayUs2x(50); //15~60us 后 接收60-240us的存在脉冲
dat=DQ; //如果x=0则初始化成功, x=1则初始化失败
DelayUs2x(25); //稍作延时返回
return dat;
}
/*------------------------------------------------
读取一个字节
------------------------------------------------*/
unsigned char ReadOneChar(void)
{
unsigned char i=0;
unsigned char dat = 0;
for (i=8;i>0;i--)
{
DQ = 0; // 给脉冲信号
dat>>=1;
DQ = 1; // 给脉冲信号
if(DQ)
dat|=0x80;
DelayUs2x(25);
}
return(dat);
}
/*------------------------------------------------
写入一个字节
------------------------------------------------*/
void WriteOneChar(unsigned char dat)
{
unsigned char i=0;
for (i=8; i>0; i--)
{
DQ = 0;
DQ = dat&0x01;
DelayUs2x(25);
DQ = 1;
dat>>=1;
}
DelayUs2x(25);
}
/*------------------------------------------------
读取温度
------------------------------------------------*/
unsigned int ReadTemperature(void)
{
unsigned char a=0;
int b=0;
int t=0;
float tt=0;
while(Init_DS18B20()); //检测初始化是否成功
WriteOneChar(0xCC); // 跳过读序号列号的操作
WriteOneChar(0x44); // 启动温度转换
DelayMs(10);
Init_DS18B20();
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0xBE); //读取温度寄存器等(共可读9个寄存器) 前两个就是温度
a=ReadOneChar(); //低位
b=ReadOneChar(); //高位
t=b;
t<<=8;
t=t|a;
tt=t*0.0625;
t= tt*10+0.5;
return(t);
}