1 控制系统的工作原理及其组成
1.1 工作原理
控制系统中,给定量又称为系统的输入量,被控制量又称为系统的输出量。
输出量的返回过程称为反馈,它表示输出量通过测量装置将信号的全部或一部分返回输入端,并与输入量进行比较,比较结果称为偏差。
控制系统的工作原理归纳如下:
- 检测输出量的实际值。
- 将实际值与给定值(输入量)进行比较得出偏差值。
- 用偏差值产生控制调节作用去消除偏差。
这种基于反馈原理,通过“检测偏差再纠正偏差”的系统称为反馈控制系统。
可见反馈控制系统至少应具备测量、比较(或计算)和执行三个基本功能。
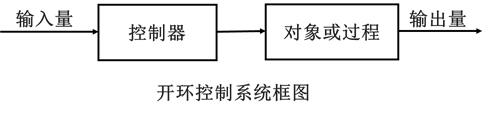
1.2 开环控制和闭环控制
实际的控制系统,根据有无反馈作用可以分为开环控制系统、闭环控制系统和半闭环控制系统三类。
1. 开环控制系统
系统只根据输入量和干扰量进行控制,而输出端和输入端之间不存在反馈回路,输出量在整个控制过程中对系统的控制不产生任何影响。
如果由于某种干扰作用使输出量偏离原始值,它没有自动纠偏能力,要进行补偿,必须再借助人工改变输入量。
开环系统的控制精度较低,优点是系统简单。
2. 闭环控制系统
系统输出端和输入端之间存在反馈回路,输出量对控制过程产生直接影响。
闭环的作用是应用反馈来减少偏差,因此,反馈控制系统必是闭环控制系统。
优点是控制精度高,但由于整个控制过程中始终存在着偏差,由于元件的惯性,若参数配置不当,很容易引起震荡,使系统不稳定,无法工作,即必须协调好精度与稳定性。

3. 半闭环控制系统
反馈信号不是直接从系统的输出端引出,而是间接地取自中间的测量元件。
控制精度位于前面两种控制系统之间,比闭环系统更易于实现系统的稳定。
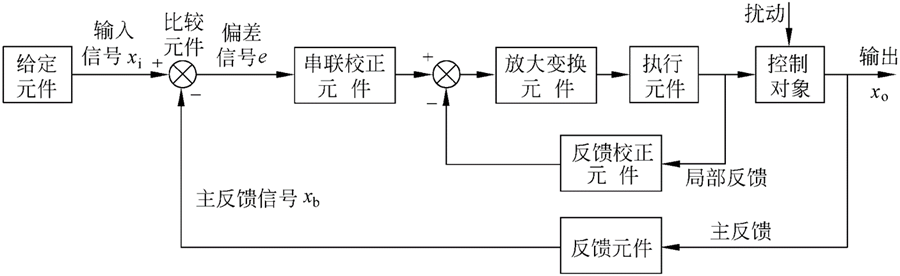
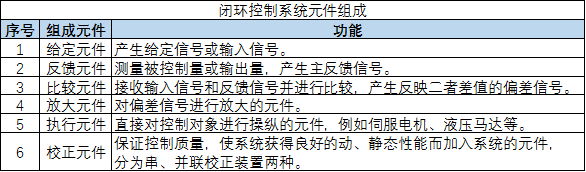
1.3 闭环控制系统的组成
2 控制系统的基本类型
2.1 按输入量的特征分类

2.2 按系统中传递信号的性质分类

连续控制系统以微分方程来描述系统的运动状态,并以拉氏变换法求解微分方程;
离散控制系统以差分方程来描述系统的运动状态,用Z变换法引出脉冲传递函数来研究系统的动态特性。
3 对控制系统的基本要求
